Tabela de conteúdos
DA10AnOopos
D = Device(anpos-camming-camming2)
A = Action functions
The DA10AnOopos function manages the analog output used in the case of an ON/OFF placement who needs analogue reference for the driver.
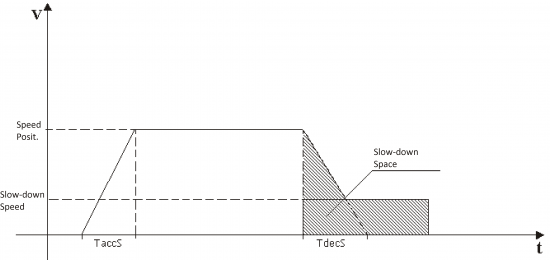
The function constructs the voltage profile based on acceleration and deceleration ramps set in function.
Ramps can be either trapezoidal or epicicloidal (“S” ramps).
For the accuracy of the positioning it is important that the transition from positioning speed to slowdown speed, ake place before the end of the space of slowdown (set in the OOPOS3 device)
IMPLEMENTATION
DA10AnOopos(ooAxis,eaDac,aslParam)
Parameters:
| IN/OUT | VARIABLE TYPE | EXAMPLE NAME | DIM | |
|---|---|---|---|---|
| IN | OOPOS3 | ooAXIS (INTDEVICE) | - | ON/OFF device that execute the placement |
| IN | EANPOS | eaDac (INTDEVICE) | - | Device that manages the analogue reference |
| IN | ARRSYS | aslParam[1] | L | Positioning speed (‰ of the max Vel) |
| IN | ARRSYS | aslParam[2] | L | Slowdown speed (‰ of the max Vel) |
| IN | ARRSYS | aslParam[3] | L | Acceleration time. Time necessary for the axis to accelerate from zero to maximum speed. (sec/100) |
| IN | ARRSYS | aslParam[4] | L | Deceleration time. Time necessary for the axis to decelerate from maximum speed to zero. (sec/100) |
| IN | ARRSYS | aslParam[5] | L | Ramps type used for the profile. 0 = Trapezoidal Acc and Dec 1 = Epicicloidal Acc and Dec 2 = Trapezoidal Acc / Epicicloidal Dec 3 = Epicicloidal Acc / Trapezoidal Dec |
| IN | ARRSYS | aslParam[6] | L | Tipo di Uscita analogica 0 = 0 ÷ 10 Volts 1 = -10 ÷ 10 Volts |
Example
CONFIGURATION FILE
.... ARRSYS aslParam L 6 ;--------------------------------------------- ; INTDEVICE Declaration ;--------------------------------------------- INTDEVICE ooAxis OOPOS3 002 2.CNT01 X 2.INP01 2.OUT01 2.OUT02 X.X X.X 2.OUT03 X.X eaDac1 EANPOS 002 2.CNT01 X X.X 2.AN01
MODULE
MAIN: aslParam[1] = 300 ;Positioning Vel = 30.0 % aslParam[2] = 50 ;Slowdown Vel = 5.0 % aslParam[3] = 100 ;Acceleration time = 1 sec aslParam[4] = 150 ;Deceleration time = 1.5 sec aslParam[5] = 0 ;Ramp type = Trapezoidal aslParam[6] = 0 ;Analog output type = 0÷10V DA10AnOopos(ooAxis,eaDac,aslParam) WAIT 1 JUMP MAIN
Note
-
This function should be placed in a module of the application to execute at every turn logical
-
For the accuracy of the positioning it is important that the transition from positioning speed to slowdown speed, take place before the end of the space of slowdown (set in the OOPOS3 device). If this does not happen you must increase the size of slowdown or decreases the deceleration time.