Indice
Device ANPOS2
1. Introduzione
Il device interno ANPOS2 permette la movimentazione di un'asse con controllo di posizione e retroazione da encoder incrementale.
Le principali caratteristiche del device sono:
-
risoluzione della misura programmabile
-
gestione finecorsa software
-
generazione della traiettoria con profili di velocità trapezoidali e curva ad S
-
rampe di accelerazione e decelerazione programmabili
-
gestione della procedura di preset (homing)
-
regolatore PID+FF
-
cattura posizione da ingresso in interrupt
-
funzione di taratura uscita analogica
-
modalità di funzionamento ad anello di posizione aperto o chiuso
-
comandi dedicati per le movimentazioni JOG
-
gestione di un'uscita digitale per segnalare uno degli stati del posizionamento (asse fermo, asse in tolleranza, ecc.)
2. Dichiarazione
Per poter usufruire del device è necessario eseguirne la dichiarazione nell'apposita sezione INTDEVICE della unit di configurazione.
;--------------------------------- ; Dichiarazione device interni ;--------------------------------- INTDEVICE ... <nome> ANPOS2 TCamp ICont IdxA HSwA IOutD IOutA
Dove:
| Nome campo | Descrizione | Esempio | Note |
|---|---|---|---|
| <nome> | Nome assegnato al device | Axe | - |
| ANPOS2 | Parola chiave che identifica il device ANPOS2 | - | - |
| TCamp | Tempo di campionamento del device espresso in millisecondi | 4 | - |
| ICont | Indirizzo del contatore incrementale bidirezionale (verificare la documentazione HW del prodotto per stabilire il corretto valore da impostare). | 2.CNT01 | Inserendo il valore X.X si otterrà un conteggio virtuale: il valore di posit coinciderà con quello di posvirt. 1) |
| IdxA | Indirizzo dell'ingresso in interrupt utilizzato come index(zero) pulse nella procedura di homing. | 1 | Inserendo il valore X il campo viene ignorato |
| HSwA | Indirizzo dell'ingresso digitale utilizzato come home switch nella procedura di homing. | 3.INP09 | Inserendo il valore X.X il campo viene ignorato |
| IOutD | Indirizzo uscita digitale il cui funzionamento è determinato dal parametro funout. | 3.OUT01 | Inserendo il valore X.X il campo viene ignorato |
| IOutA | Indirizzo dell'uscita analogica o dell'uscita impulsi per il comando dell'attuatore (verificare la documentazione HW del prodotto per stabilire il corretto valore da impostare). | 3.AN01 o 3.PULSE01 | Inserendo il valore X.X il campo viene ignorato |
 | Tutti i campi della dichiarazione sono obbligatori e devono essere presenti sulla stessa linea. Impostare “X.X” oppure “X” nel caso una risorsa non sia disponibile o non venga utilizzata. Disabilitare una risorsa significa disabilitare tutte le funzionalità del device che la utilizzano. |
|---|
3. Funzionamento
Il funzionamento del device è illustrato dal seguente schema a blocchi:

3.1 Factors
Il blocco “Factors” calcola i fattori di conversione di posizione e velocità.
Il “position factor” (PF) è un coefficiente per la conversione della posizione espressa con l'unità di misura del trasduttore nell'unità di misura della posizione(Um), e viceversa. Tipicamente l'unità di misura della posizione può essere ad esempio metri piuttosto che millimetri piuttosto che centesimi, mentre l'unità di misura del trasduttore, l'encoder, è sempre impulsi. I parametri che concorrono al calcolo del position factor sono pulse e measure ed è calcolato come rapporto tra questi due.
Il “velocity factor” (VF) è un coefficiente per la conversione delle velocità espresse con l'unità di misura del trasduttore nell'unità di misura della velocità (Uv), e viceversa. Tipicamente l'unità di misura della velocità può essere ad esempio mt/min (metri al minuto) piuttosto che RPM (giri al minuto), piuttosto che mm/s (millimetri al secondo). Ovviamente, rispetto al position factor, entra nel calcolo del VF anche l'unità di tempo e la posizione del punto decimale.
3.2 TRAJECTORY generator
Il blocco “TRAJECTORY generator” genera la traiettoria di posizionamento nel rispetto della velocità e delle accelerazioni impostate.
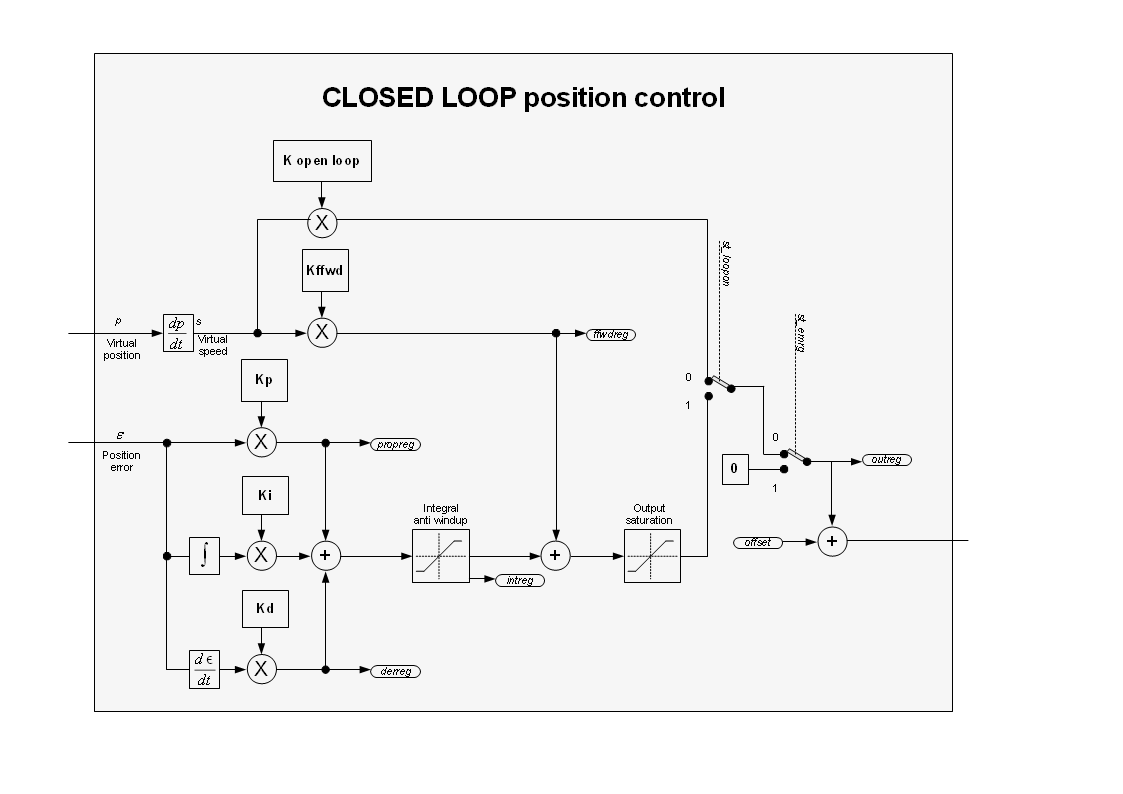
3.3 CLOSED LOOP position control
Il blocco “CLOSED LOOP position control” è costituito principalmente dal regolatore PID con funzione di antireset windup dell'integrale e dall'azione Feed forward. Inoltre aggiorna con il valore di uscita il dispositivo IOutA di attuazione.
3.4 Following error control
Il blocco “Following error control” attiva/disattiva lo stato st_foller a seconda che la differenza tra la posizione comandata (posvirt) e la posizione attuale (posit) in valore assoluto superi o non superi la soglia programmata (follerrthresh). Si occupa inoltre di aggiornare i valori di mxnegfoller e mxposfoller che sono i valori massimi, positivo e negativo, raggiunti dall'errore inseguimento.
3.5 Homing sequence controller
Il blocco “Homing sequence controller” gestisce le modalità di ricerca della “home position” definite dal parametro prsmode. Queste modalità di ricerca prevedono il caricamento della posizione di home tramite l'ingresso home switch oppure tramite l'ingresso index (zero). Il blocco “Homing sequence controller” interagisce con il “TRAJECTORY generator” per eseguire la sequenza dei movimenti dell'asse previsti per ogni modalità di ricerca.
3.5.1 Descrizione dei dati in ingresso
E' possibile specificare la velocità ed il modo di ricerca. Inoltre è possibile stabilire un offset per fare in modo lo zero coincida con il sistema di coordinata voluta. Ci sono due velocità; In una tipica sequenza di ricerca una velocità rapida (prsvel) è utilizzata per ricercare l'attivazione dell'ingresso home switch, mentre una velocità lenta (sprsvel) è utilizzata per ricercare l'ingresso index(zero).
E' possibile indicare se l'ingresso home switch deve essere ritenuto attivo con livello logico zero (prsswlogic = 0) oppure con livello logico uno (prsswlogic = 1).
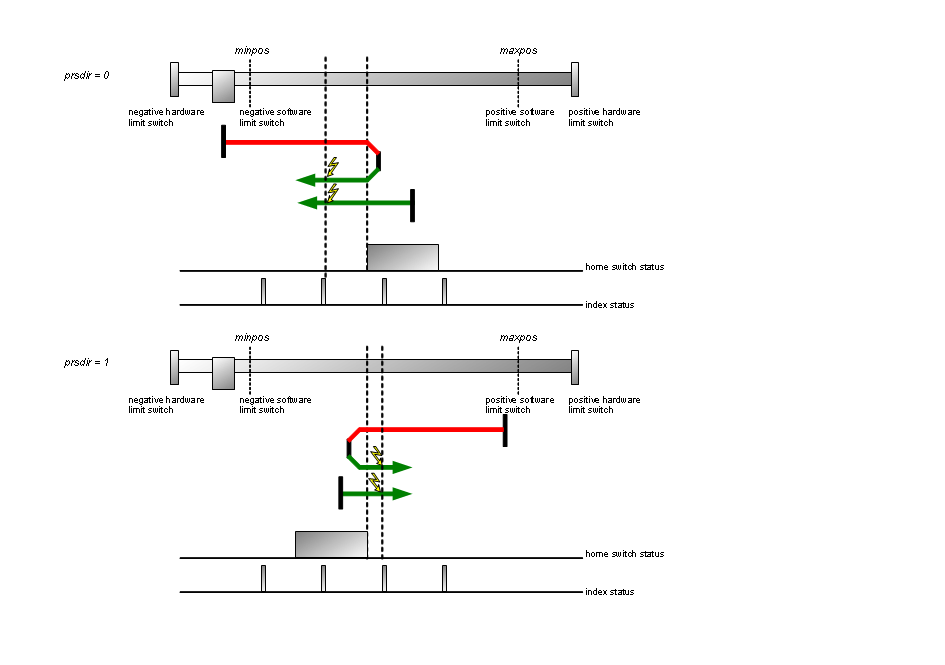
E' possibile istruire se il modo di ricerca deve essere effettuato in avanti (prsdir = 0) oppure indietro (prsdir = 1).
La modalità di ricerca è definita mediante il parametro prsmode descritto di seguito.
Nelle seguenti immagini la velocità di movimento è così rappresentata:

3.5.2 Descrizione dei dati in uscita
Lo stato st_prson indica che la procedura di ricerca è attiva. Lo stato st_prsok indica che la procedura di ricerca è stata conclusa con successo. Il parametro deltaprspos viene aggiornato ad ogni conclusione della ricerca ed indica di quanto è stata corretta la posizione dell'asse.
3.5.3 Homing mode 0
Il questa modalità, la procedura non utilizza l'ingresso index (zero), ma solamente l'ingresso home switch. La direzione di movimento dipende dal parametro prsdir e dallo stato dell'ingresso home switch all'avvio della procedura.

3.5.4 Homing mode 1
Il questa modalità, la procedura utilizza sia l'ingresso index(zero) che l'ingresso home switch. La direzione di movimento dipende dal parametro prsdir e dallo stato dell'ingresso home switch all'avvio della procedura.
3.5.5 Homing mode 2
Il questa modalità, l'attivazione dell'ingresso home switch carica direttamente la quota di homing sul conteggio senza attivare la procedura con il comando PRESET
4. Elenco Parametri
measure
| Breve descrizione | Misura di riferimento per il calcolo del position factor |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | 1÷999999 |
| ID parametro | 01 |
| Condizioni di scrittura | st_still=1, st_grouped=0 |
Descrizione:
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi primari impostati nel parametro pulse. Questo parametro è utilizzato per il calcolo del fattore di conversione tra impulsi primari ed unità di misura.
posit = (encoder ⋅ measure) / pulse
Il rapporto measure/pulse deve avere un valore compreso tra 0.00935 e 1.
pulse
| Breve descrizione | Numero di impulsi primari per il calcolo del position factor |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 1÷999999 |
| ID parametro | 02 |
| Condizioni di scrittura | st_still=1, st_grouped=0 |
Descrizione:
Indica il numero di impulsi primari (1 impulso encoder = 4 impulsi primari) che genererà il trasduttore bidirezionale per ottenere un movimento pari a measure. Questo parametro è utilizzato per il calcolo del fattore di conversione tra impulsi primari ed unità di misura.
posit = (encoder · measure) / pulse
Il rapporto measure/pulse deve avere un valore compreso tra 0.00935 e 1.
maxpos
| Breve descrizione | Finecorsa software positivo |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | -999999÷999999 |
| ID parametro | 03 |
| Condizioni di scrittura | st_grouped=0 |
Descrizione:
Definisce il valore limite massimo per la posizione comandata (setpos). Inoltre è il limite massimo per il movimento JOG avanti (MANFW).
minpos
| Breve descrizione | Finecorsa software negativo |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | -999999÷999999 |
| ID parametro | 04 |
| Condizioni di scrittura | st_grouped=0 |
Descrizione:
Definisce il valore limite minimo per la posizione comandata (setpos). Inoltre è il limite minimo per il movimento JOG indietro (MANBW).
prspos
| Breve descrizione | Home offset |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | - |
| ID parametro | 05 |
| Condizioni di scrittura | - |
Descrizione:
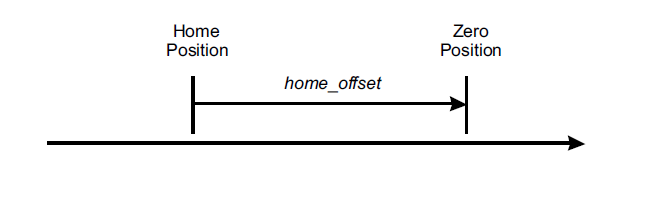
Rappresenta la differenza tra la posizione zero dell'applicazione e la posizione di home ricercata durante la procedura di homing. Quando la procedura di homing si conclude la posizione zero viene spostata rispetto alla posizione di home aggiungendo un valore pari al parametro prspos. Durante l'homing l'asse ricerca la posizione di distanza tra la posizione di home e la posizione dove avviene il caricamento dell'homing offset
deltaprspos
| Breve descrizione | Differenza tra le home positions |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Um/10 |
| Range valido | 0÷999999 |
| ID parametro | 06 |
| Condizioni di scrittura | - |
Descrizione:
E' la differenza tra la home position prima e la home position dopo la procedura di homing. Questo valore può essere utilizzato per verificare il corretto funzionamento del trasduttore di posizione.
maxvel
| Breve descrizione | Velocità massima |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Uv |
| Range valido | 0÷999999 |
| ID parametro | 07 |
| Condizioni di scrittura | st_still=1, st_grouped=0 |
Descrizione:
È il limite di impostazione delle velocità. Per un corretto funzionamento del PID esso deve coincidere con la velocità che l'asse raggiunge quando il valore dell'uscita di attuazione è massimo.
prsvel
| Breve descrizione | Velocità per la ricerca dell' home switch. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Uv |
| Range valido | 0÷maxvel |
| ID parametro | 08 |
| Condizioni di scrittura | - |
Descrizione:
È la velocità di movimento dell'asse utilizzata durante la procedura di homing per la ricerca dell'home switch.
sprsvel
| Breve descrizione | Velocità utilizzata per ricerca dell'index(zero) pulse . |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Uv |
| Range valido | 0÷maxvel |
| ID parametro | 09 |
| Condizioni di scrittura | - |
Descrizione:
È la velocità utilizzata durante la procedura di homing per la ricerca dell'index(zero) pulse.
toll
| Breve descrizione | Tolleranza. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um/10 |
| Range valido | -999999÷999999 |
| ID parametro | 10 |
| Condizioni di scrittura | - |
Descrizione:
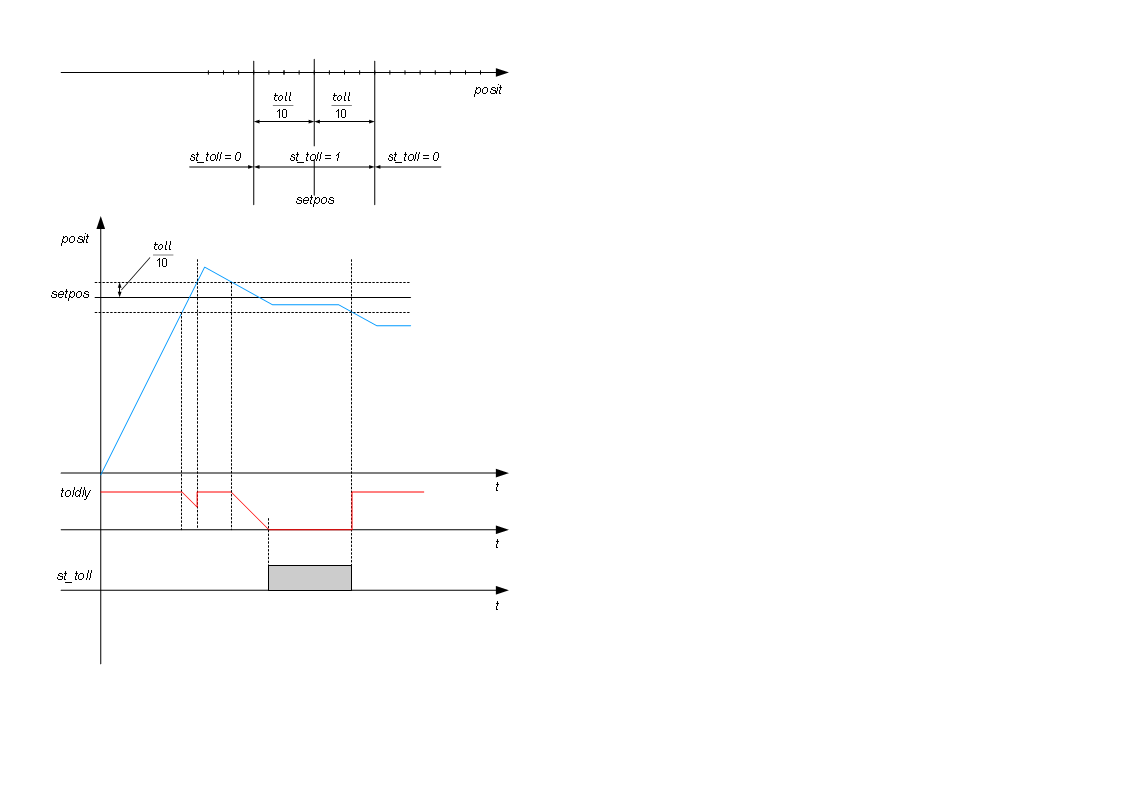
Definisce una finestra, espressa in decimi di unità di misura, simmetrica intorno alla quota di posizionamento (setpos).Se la posizione reale (posit) si trova all'interno di questa finestra, si attiva lo stato di asse in tolleranza (st_toll). L'attivazione di st_toll non avviene appena l'asse entra in questa finestra, ma dopo il tempo di ritardo definito dal parametro toldly e solo se la condizione di posizione reale all'interno della finestra permane durante questo tempo.
follerrthresh
| Breve descrizione | Soglia allarme errore d'inseguimento. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um/10 |
| Range valido | 0÷2147483648 |
| ID parametro | 11 |
| Condizioni di scrittura | st_intenbl=0 |
Descrizione:
Definisce una finestra, espressa in decimi di unità di misura, intorno alla posizione virtuale (posvirt). Se la posizione reale (posit) si trova all'esterno di questa finestra si attiva lo stato di errore inseguimento(st_foller) per un tempo minimo di 300ms non impostabile. Se la posizione reale si trova all'interno, st_foller si disattiva (dopo il tempo minimo). Tale soglia è controllata solo se sono valide le condizioni:st_error = 0, st_regoff = 0, st_calon = 0 e st_loopon = 1.

funint
| Breve descrizione | Funzionamento dell'ingresso in interrupt. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷4 |
| ID parametro | 12 |
| Condizioni di scrittura | - |
Descrizione:
Seleziona il funzionamento dell'ingresso in interrupt. I valori assumono i seguenti significati:
0 = utilizzato per la procedura di homing.
1 = cattura il conteggio sul fronte di salita e lo memorizza nel parametro delta.
2 = cattura il conteggio sul fronte di salita, ne inverte il segno, e lo memorizza nel parametro delta.
3 = cattura il conteggio sul fronte di discesa e lo memorizza nel parametro delta.
4 = cattura il conteggio sul fronte di discesa, ne inverte il segno, e lo memorizza nel parametro delta.
Per utilizzare il funzionamento delle modalità 1÷4 è necessario settare st_intenbl=1 attraverso il comando INTENBL.
funout
| Breve descrizione | Funzionamento uscita digitale. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷4 |
| ID parametro | 13 |
| Condizioni di scrittura | - |
Descrizione:
Seleziona il funzionamento dell'uscita digitale.
0 = l'uscita non è utilizzata. (Lo stato non viene mai aggiornato dal device)
1 = lo stato dell'uscita è uguale a st_toll.
2 = lo stato dell'uscita è uguale a st_still.
3 = lo stato dell'uscita è uguale a st_foller.
4 = lo stato dell'uscita è uguale a st_vconst.
ramptype
| Breve descrizione | Tipo di rampa. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷1 |
| ID parametro | 14 |
| Condizioni di scrittura | st_still=1 |
Descrizione:
Seleziona il tipo di rampa.
0 = rampa lineare.
1 = rampa ad S.
tacc
| Breve descrizione | Tempo di accelerazione. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | centesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 15 |
| Condizioni di scrittura | st_grouped=0 |
Descrizione:
È utilizzato per definire l'accelerazione ed è il tempo che impiega l'asse per passare da velocità 0 (asse fermo) a velocità massima (maxvel). E' possibile modificare il tempo tacc anche se un movimento è in corso; in tal caso il valore verrà accettato a condizione che il posizionamento si possa concludere correttamente alla posizione comandata.
tdec
| Breve descrizione | Tempo di decelerazione. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | centesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 16 |
| Condizioni di scrittura | st_grouped=0 |
Descrizione:
È utilizzato per definire la decelerazione ed è il tempo che impiega l'asse per passare da velocità massima (maxvel) a velocità 0 (asse fermo). E' possibile modificare il tempo tacc anche se un movimento è in corso; in tal caso il valore verrà accettato a condizione che il posizionamento si possa concludere correttamente alla posizione comandata.
tinv
| Breve descrizione | Ritardo per inversione della direzione. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | centesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 17 |
| Condizioni di scrittura | - |
Descrizione:
E' il tempo di attesa minimo tra il termine di un posizionamento e l'avvio del successivo se le direzioni dei due sono opposte. Un comando di movimento (START, MANBW, …) eseguito durante questo tempo minimo viene comunque acquisito e lo stato st_still va immediatamente a 0.
mxnegfoller
| Breve descrizione | Massimo valore negativo errore inseguimento. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read - Write |
| Unità di misura | Um/10 |
| Range valido | 0÷2147483648 |
| ID parametro | 18 |
| Condizioni di scrittura | - |
Descrizione:
È il valore massimo di errore inseguimento negativo rilevato espresso in decimi di unità di misura.
mxposfoller
| Breve descrizione | Massimo valore positivo errore inseguimento. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read - Write |
| Unità di misura | Um/10 |
| Range valido | 0÷2147483648 |
| ID parametro | 19 |
| Condizioni di scrittura | - |
Descrizione:
È il valore massimo di errore inseguimento positivo rilevato espresso in decimi di unità di misura.
toldly
| Breve descrizione | Ritardo segnalazione di tolleranza. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | centesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 20 |
| Condizioni di scrittura | - |
Descrizione:
Definisce il tempo che intercorre tra l'arrivo dell'asse nella fascia di tolleranza e la relativa segnalazione di stato (st_toll).
pgain
| Breve descrizione | Guadagno proporzionale. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷32767 |
| ID parametro | 21 |
| Condizioni di scrittura | - |
Descrizione:
È il valore del guadagno proporzionale nel regolatore PID. Viene inserito in millesimi (perciò inserendo 1000 il coefficiente sarà pari a 1).
feedfw
| Breve descrizione | Coefficiente di feed forward. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | ‰ |
| Range valido | 0÷2000 |
| ID parametro | 22 |
| Condizioni di scrittura | - |
Descrizione:
È il coefficiente percentuale che, moltiplicato per la velocità teorica, genera la parte feed forward dell'uscita di regolazione. Il valore è inserito in decimi (perciò inserendo 1000 la percentuale sarà del 100.0%)
integt
| Breve descrizione | Tempo di integrazione dell' errore di inseguimento. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | millesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 23 |
| Condizioni di scrittura | - |
Descrizione:
È il tempo di integrazione dell'errore per l'azione integrale del regolatore PID.
derivt
| Breve descrizione | Tempo di derivazione dell'errore di inseguimento. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | millesimi di secondo |
| Range valido | 0÷32767 |
| ID parametro | 24 |
| Condizioni di scrittura | - |
Descrizione:
È il tempo di derivazione della derivata del regolatore PID.
prsmode
| Breve descrizione | Modo di ricerca della posizione di home. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷2 |
| ID parametro | 25 |
| Condizioni di scrittura | st_prson=0 |
Descrizione:
Seleziona la modalità di funzionamento della ricerca della posizione di home
0 = procedura di homing con caricamento sull'ingresso home switch.
1 = procedura di homing con caricamento sull'ingresso index(pulse).
2 = caricamento posizione di homing sull'ingresso home switch senza eseguire movimenti.
prsdir
| Breve descrizione | Direzione di movimento iniziale per la procedura di homing. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷1 |
| ID parametro | 26 |
| Condizioni di scrittura | st_prson=0 |
Descrizione:
Seleziona la direzione iniziale di movimento nella procesura di homing.
0 = avanti.
1 = indietro.
prsswlogic
| Breve descrizione | Logica ingresso home switch. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷1 |
| ID parametro | 27 |
| Condizioni di scrittura | st_prson=0 |
Descrizione:
Seleziona la logica dello stato dell'ingresso home switch.
0 = ingresso home switch normalmente zero (disattivo).
1 = ingresso home switch normalmente uno (attivo).
unitvel
| Breve descrizione | Unità di tempo per il calcolo della velocità. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷1 |
| ID parametro | 28 |
| Condizioni di scrittura | st_still=1, st_grouped=0 |
Descrizione:
Seleziona l'unità di tempo per i parametri di velocità.
0 = Um/min.
1 = Um/sec.
decpt
| Breve descrizione | Fattore di conversione per l'unità di misura della velocità. |
|---|---|
| Dimensione | Byte |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷3 |
| ID parametro | 29 |
| Condizioni di scrittura | st_still=1, st_grouped=0 |
Descrizione:
E' l'esponente del fattore di scala dell'unità di misura della posizione per le velocità calcolato come 10decpt. Ad esempio, se l'unità di misura della posizione è millimetri, ed unitvel=1, l'unità di misura della velocità sarà:
-
mm/s (con decpt = 0),
-
cm/s (con decpt = 1),
-
dm/s (con decpt = 2),
-
m/s (con decpt = 3).
Perciò, sia il parametro vel che i parametri di impostazione delle veloocità (setvel, prsvel, …) saranno espressi con questa unità di misura.
offset
| Breve descrizione | Offset uscita analogica. |
|---|---|
| Dimensione | Word |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | bit |
| Range valido | -32768÷32767 |
| ID parametro | 30 |
| Condizioni di scrittura | - |
Descrizione:
Definisce il valore in bit della correzione relativa all'uscita analogica in modo da compensare l'eventuale offset dello stadio di ingresso analogico dell'azionamento.
Se l'uscita analogica è ± 10 Volt allora il valore 32767 corrisponde a +10Volt e -32768 a -10Volt.
setpos
| Breve descrizione | Posizione comandata. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | minpos÷maxpos |
| ID parametro | 31 |
| Condizioni di scrittura | Vedi descrizione |
Descrizione:
E' la posizione comandata ed espressa in unità di misura (um). E' possibile modificare la posizione comandata anche se un movimento è in corso; in tal caso l'asse si posizionerà alla nuova posizione comandata a condizione che ciò possa avvenire senza dover invertire la direzione di movimento. Ad esempio, se durante un movimento in avanti, viene comandata una posizione inferiore a quella attuale dell'asse il nuovo valore di setpos non viene accettato e si attiva lo stato di warning (st_warning).
setvel
| Breve descrizione | Velocità comandata. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Uv |
| Range valido | 0÷maxvel |
| ID parametro | 32 |
| Condizioni di scrittura | Vedi descrizione |
Descrizione:
È la velocità con la quale vengono comandati i posizionamenti con i comandi START, MANBW e MANFW.
E' possibile modificare la velocità comandata anche se un movimento è in corso a condizione il trajectory generator non sia nella fase di decelerazione.
vout
| Breve descrizione | Tensione di uscita. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read - Write |
| Unità di misura | decimi di Volt |
| Range valido | -100÷100 |
| ID parametro | 33 |
| Condizioni di scrittura | st_error=0, st_cal=1, st_grouped=0, st_emrg = 0 |
Descrizione:
Durante la procedura di calibrazione (st_cal=1) è il valore di tensione impostabile sull'uscita analogica. Se st_cal=0 il parametro è in sola lettura ed indica il valore di tensione presente sull'uscita analogica generato regolatore PID.
vel
| Breve descrizione | Velocità attuale |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Uv |
| Range valido | - |
| ID parametro | 34 |
| Condizioni di scrittura | - |
Descrizione:
È il valore della velocità attuale dell'asse espressa in unità di misura della velocità. L'aggiornamento viene eseguito ogni 250 ms. L'unità di misura dipende dai parametri unitvel e decpt.
frq
| Breve descrizione | Frequenza dei segnali di ingresso. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Hz |
| Range valido | - |
| ID parametro | 35 |
| Condizioni di scrittura | - |
Descrizione:
È il valore della frequenza dei segnali in ingresso al contatore bidirezionale. L'aggiornamento è eseguito ogni 250 ms.
posit
| Breve descrizione | Posizione attuale. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | - |
| ID parametro | 36 |
| Condizioni di scrittura | Vedi descrizione |
Descrizione:
È il valore della posizione attuale dell'asse.
posit = encoder · measure / pulse
E' possibile modificare questo parametro anche se un movimento è in corso a condizione che la nuova posizione attuale permetta di concludere il posizionamento senza dover invertire la direzione di movimento.
encoder
| Breve descrizione | Posizione attuale in impulsi encoder. |
|---|---|
| Dimensione | Long |
| Valore di default | Ritentivo |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 37 |
| Condizioni di scrittura | Vedi descrizione |
Descrizione:
È il valore della posizione attuale dell'asse in impulsi encoder.
E' possibile modificare questo parametro anche se un movimento è in corso a condizione che la nuova posizione attuale permetta di concludere il posizionamento senza dover invertire la direzione di movimento.
follerr
| Breve descrizione | Errore d'inseguimento. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Um/10 |
| Range valido | - |
| ID parametro | 38 |
| Condizioni di scrittura | - |
Descrizione:
È il valore istantaneo dell'errore d'inseguimento espresso in decimi di unità di misura.
outreg
| Breve descrizione | Valore dell' uscita PID + FF. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | bit |
| Range valido | -32768÷32767 |
| ID parametro | 39 |
| Condizioni di scrittura | - |
Descrizione:
È il valore istantaneo espresso in bit dell'uscita del regolatore PID.
 | Se l'uscita di attuazione è un'uscita analogica il valore 32767 corrisponde a 10V e -32768 corrisponde a -10V. |
|---|
ffwdreg
| Breve descrizione | Valore dell'uscita feed forward. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | bit |
| Range valido | -32768÷32767 |
| ID parametro | 40 |
| Condizioni di scrittura | - |
Descrizione:
È il valore istantaneo espresso in bit dell'uscita feed forward.
propreg
| Breve descrizione | Valore dell'uscita proporzionale. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | bit |
| Range valido | -32768÷32767 |
| ID parametro | 41 |
| Condizioni di scrittura | - |
Descrizione:
È il valore istantaneo dell'uscita proporzionale nel regolatore PID.
intreg
| Breve descrizione | Valore dell'uscita integrale. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | bit |
| Range valido | -32768÷32767 |
| ID parametro | 42 |
| Condizioni di scrittura | - |
Descrizione:
È il valore istantaneo dell'uscita integrale nel regolatore PID.
smartcmd
| Breve descrizione | Smart command (ex derivt). |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | - |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 43 |
| Condizioni di scrittura | - |
Descrizione:
È un valore che permette di eseguire un comando interno del device.
delta
| Breve descrizione | Valore somma per il comando DELCNT. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read - Write |
| Unità di misura | Um |
| Range valido | -999999÷999999 |
| ID parametro | 44 |
| Condizioni di scrittura | st_intenbl=0 |
Descrizione:
È il valore che viene utilizzato dal comando DELCNT da sommare alla posizione attuale. Inoltre tale parametro viene anche utilizzato per la memorizzazione della posizione attuale quando avviene la cattura da ingresso in interrupt.
posvirt
| Breve descrizione | Posizione virtuale. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Um |
| Range valido | - |
| ID parametro | 45 |
| Condizioni di scrittura | - |
Descrizione:
È il valore della posizione istantanea comandata.
brakepos
| Breve descrizione | Posizione inizio frenata. |
|---|---|
| Dimensione | Long |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | Um |
| Range valido | - |
| ID parametro | 46 |
| Condizioni di scrittura | - |
Descrizione:
È il valore della posizione in cui inizierà la rampa di decelerazione.
wrncode
| Breve descrizione | Codice di identificazione warning |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | |
| ID parametro | 47 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
wrnpar
| Breve descrizione | ID del parametro che ha provocato il warning. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | |
| ID parametro | 48 |
| Condizioni di scrittura | - |
Descrizione:
Indica quale parametro ha provocato il warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
wrnvalue
| Breve descrizione | Codice di identificazione della causa del warning |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 49 |
| Condizioni di scrittura | - |
Descrizione:
Indica la causa del warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errcode
| Breve descrizione | Codice di identificazione dell'errore. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 50 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errpar
| Breve descrizione | ID del parametro che ha provocato l'errore. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 51 |
| Condizioni di scrittura | - |
Descrizione:
Indica il parametro che ha provocato l'errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errvalue
| Breve descrizione | Codice di identificazione della causa dell'errore |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 52 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di causa dell'errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
5. Elenco Stati
st_capture
| Breve descrizione | Stato di conteggio catturato. |
|---|---|
| Valore di default | 0 |
| ID stato | 53 |
Descrizione:
Indica che la cattura conteggio è avvenuta.
0 = cattura in conteggio non avvenuta.
1 = cattura conteggio avvenuta.
st_emrg
| Breve descrizione | Stato di emergenza. |
|---|---|
| Valore di default | 0 |
| ID stato | 54 |
Descrizione:
Indica lo stato di asse in emergenza.
0 = asse non in emergenza.
1 = asse in emergenza.
st_toll
| Breve descrizione | Stato di tolleranza. |
|---|---|
| Valore di default | 0 |
| ID stato | 55 |
Descrizione:
Indica lo stato di asse in tolleranza.
0 = asse non in tolleranza.
1 = asse in tolleranza.
st_prsok
| Breve descrizione | Esito della sequenza di homing. |
|---|---|
| Valore di default | 0 |
| ID stato | 56 |
Descrizione:
Indica se la sequenza di homing è stata eseguita correttamente
0 = procedura di homing non effettuata o non conclusa correttamente.
1 = procedura di homing effettuata e conclusa correttamente.
Lo stato si disattiva con il comando RSPRSOK.
st_still
| Breve descrizione | Stato di movimento. |
|---|---|
| Valore di default | 1 |
| ID stato | 57 |
Descrizione:
Indica lo stato dell'asse.
0 = asse in movimento.
1 = asse fermo.
st_prson
| Breve descrizione | Stato della procedura di homing. |
|---|---|
| Valore di default | 0 |
| ID stato | 58 |
Descrizione:
Indica se procedura di homing è in esecuzione.
0 = procedura di homing non in esecuzione.
1 = procedura di homing in esecuzione.
st_movdir
| Breve descrizione | Direzione di movimento. |
|---|---|
| Valore di default | 0 |
| ID stato | 59 |
Descrizione:
Indica la direzione di movimento.
0 = avanti.
1 = indietro.
Quando l'asse è fermo lo stato indica la direzione dell'ultimo movimento effettuato.
st_loopon
| Breve descrizione | Attivazione del loop di posizione. |
|---|---|
| Valore di default | 0 |
| ID stato | 60 |
Descrizione:
Indica l'attivazione del loop di posizione.
0 = loop di posizione disattivo.
1 = loop di posizione attivo.
st_foller
| Breve descrizione | Stato di errore inseguimento. |
|---|---|
| Valore di default | 0 |
| ID stato | 61 |
Descrizione:
Indica che il valore dell'errore di inseguimento (follerr) ha superato la soglia di allarme (follerrthresh). Quando si attiva rimane tale per un periodo minimo di 300 ms.
0 = errore inseguimento inferiore alla soglia di allarme.
1 = errore inseguimento superiore alla soglia di allarme.
st_regoff
| Breve descrizione | Disabilitazione posizionatore e uscita di attuazione. |
|---|---|
| Valore di default | 0 |
| ID stato | 62 |
Descrizione:
Indica se il device permette i posizionamenti e aggiorna l'uscita di attuazione.
0 = posizionamenti abilitati.
1 = posizionamenti disabilitati.
st_cal
| Breve descrizione | Stato di calibrazione. |
|---|---|
| Valore di default | 0 |
| ID stato | 63 |
Descrizione:
Indica che è attivo lo stato di calibrazione.
0 = stato di calibrazione non attivo.
1 = stato di calibrazione attivo.
st_acc
| Breve descrizione | Stato di accelerazione. |
|---|---|
| Valore di default | 0 |
| ID stato | 64 |
Descrizione:
Indica che il trjectory generator è nella fase di accelerazione.
0 = non in fase di accelerazione.
1 = fase di accelerazione.
st_dec
| Breve descrizione | Stato di decelerazione. |
|---|---|
| Valore di default | 0 |
| ID stato | 65 |
Descrizione:
Indica che il trjectory generator è nella fase di decelerazione.
0 = non in fase di decelerazione.
1 = fase di decelerazione.
st_vconst
| Breve descrizione | Stato di velocità costante. |
|---|---|
| Valore di default | 0 |
| ID stato | 66 |
Descrizione:
Indica che il trjectory generator è nella fase di velocità costante.
0 = non in fase di velocità costante.
1 = fase di velocità costante.
st_warning
| Breve descrizione | Presenza di un warning. |
|---|---|
| Valore di default | 0 |
| ID stato | 67 |
Descrizione:
Indica lo stato di warning del device, per riconoscere il tipo di warning si deve fare riferimento alle variabili wrncode, wrnvalue e wrnpar.
0 = warning non presente.
1 = warning presente.
—
st_error
| Breve descrizione | Presenza di un errore. |
|---|---|
| Valore di default | 0 |
| ID stato | 68 |
Descrizione:
Indica lo stato di errore del device, per riconoscere il tipo di errore si deve far riferimento alle variabili errcode e errvalue.
0 = errore non presente.
1 = errore presente.
st_intenbl
| Breve descrizione | Cattura conteggio da interrupt abilitata. |
|---|---|
| Valore di default | 0 |
| ID stato | 69 |
Descrizione:
Indica se la cattura del conteggio da ingresso d'interrupt è abilitata.
0 = cattura conteggio da interrupt non abilitata.
1 = cattura conteggio da interrupt abilitata.
st_cntlock
| Breve descrizione | Indica se il conteggio viene o meno aggiornato dalla lettura degli impulsi encoder. |
|---|---|
| Valore di default | Ritentivo |
| ID stato | 70 |
Descrizione:
Indica lo stato di abilitazione dell'aggiornamento del conteggio.
0 = il conteggio viene aggiornato.
1 = il conteggio non viene aggiornato e rimane bloccato all'ultimo valore acquisito.
st_cntrev
| Breve descrizione | Stato di direzione antioraria per l'incremento del conteggio. |
|---|---|
| Valore di default | Ritentivo |
| ID stato | 71 |
Descrizione:
Indica la direzione di rotazione che causa l'incremento del conteggio.
0 = orario.
1 = antiorario.
st_grouped
| Breve descrizione | Indica se il device appartiene ad un gruppo device o meno. |
|---|---|
| Valore di default | 0 |
| ID stato | 72 |
Descrizione:
Durante alcune operazioni come quelle di interpolazione un device ANPOS2 può appartenere ad un gruppo device. Se il parametro st_grouped = 1 non si potranno modificare i valori di conteggio ne utilizzare i comandi di posizionamento.
0 = Device non appartiene ad un gruppo.
1 = Device in un gruppo.
6. Elenco Comandi
INTENBL
| Breve descrizione | Abilita la cattura del conteggio. |
|---|---|
| Condizione | st_error=0, funint>0 |
| ID comando | 73 |
Descrizione:
Abilita la cattura del conteggio
INTDSBL
| Breve descrizione | Disabilita la cattura del conteggio. |
|---|---|
| Condizione | st_error=0, funint>0 |
| ID comando | 73 |
Descrizione:
Disabilita la cattura del conteggio
EMRG
| Breve descrizione | Emergenza. |
|---|---|
| Condizione | st_error=0 |
| ID comando | 74 |
Descrizione:
Pone in emergenza l'asse interrompendo, senza rampa di decelerazione, l'eventuale posizionamento in corso e pone st_emrg a 1. Inibisce, inoltre, l'esecuzione di tutti i comandi di movimento e disabilita il loop di posizione.
RESUME
| Breve descrizione | Ripristino dalla condizione di emergenza. |
|---|---|
| Condizione | st_error = 0, st_emrg = 1 |
| ID comando | 74 |
Descrizione:
Ripristino dalla condizione di emergenza dell'asse, viene riabilitato il loop di posizione e i comandi di posizionamento.
STOP
| Breve descrizione | Interrompe il posizionamento in corso. |
|---|---|
| Condizione | st_error=0, st_regoff=0, st_emrg=0, st_still=0, st_cal=0, st_grouped=0 |
| ID comando | 75 |
Descrizione:
Interrompe l'eventuale posizionamento in corso dell'asse eseguendone l'arresto con la rampa di decelerazione programmata.
START
| Breve descrizione | Inizio del posizionamento. |
|---|---|
| Condizione | st_error=0, st_regoff=0, st_emrg=0, st_still=1, st_cal=0, st_grouped=0 |
| ID comando | 76 |
Descrizione:
Comanda il posizionamento alla quota setpos con velocità setvel.
PRESET
| Breve descrizione | Avvio ricerca della home position. |
|---|---|
| Condizione | st_error = 0, st_regoff = 0, st_emrg = 0, st_still = 1, st_cal = 0 , prsvel>0, sprevel >0 |
| ID comando | 77 |
Descrizione:
Avvia la ricerca della home position, attiva lo stato st_prson e disattiva lo stato st_prsok. Se la ricerca è già attiva, il comando esegue l'inversione della direzione del movimento.
LOOPON
| Breve descrizione | Abilita il loop di posizione. |
|---|---|
| Condizione | st_error = 0, st_grouped=0 |
| ID comando | 78 |
Descrizione:
Abilita il loop di posizione attivando il regolatore PID e pone st_loopon.
LOOPOFF
| Breve descrizione | Disabilita il loop di posizione. |
|---|---|
| Condizione | st_error = 0 , st_grouped=0 |
| ID comando | 78 |
Descrizione:
Disabilita il loop di posizione disattivando il PID e pone st_loopon a 0; E' ancora possibile eseguire movimenti ma l'uscita di attuazione viene calcolata con il valore di virtual speed e di K openloop (vedi descrizione blocco CLOSED LOOP POSITION CONTROL).
MANFW
| Breve descrizione | Comando di JOG avanti. |
|---|---|
| Condizione | st_error=0, st_regoff=0, st_emrg=0, st_still=1, st_cal=0, st_prson=0, st_grouped=0 |
| ID comando | 79 |
Descrizione:
Comanda posizionamento a maxpos con la velocità setvel. Se la posizione attuale è superiore o uguale a maxpos, il comando non avrà effetto.
MANBW
| Breve descrizione | Comando di JOG indietro. |
|---|---|
| Condizione | st_error=0, st_regoff=0, st_emrg=0, st_still=1, st_cal=0, st_prson=0, st_grouped=0 |
| ID comando | 80 |
Descrizione:
Comanda posizionamento a minpos con la velocità setvel. Se la posizione attuale è inferiore o uguale a minpos, il comando non avrà effetto.
CALON
| Breve descrizione | Attiva lo stato di calibrazione. |
|---|---|
| Condizione | st_error=0, st_grouped=0 |
| ID comando | 81 |
Descrizione:
Attiva lo stato di calibrazione nel quale l'uscita di attuazione non è più aggiornata dal regolatore PID ma è possibile impostarne il valore tramite il parametro vout.
CALOFF
| Breve descrizione | Disattiva lo stato di calibrazione. |
|---|---|
| Condizione | st_error = 0, st_grouped=0 |
| ID comando | 81 |
Descrizione:
Esce dallo stato di calibrazione cosicchè l'uscita di attuazione torna ad essere comandata dal regolatore PID.
RSCAPTURE
| Breve descrizione | Azzera lo stato di st_capture. |
|---|---|
| Condizione | st_error=0 |
| ID comando | 82 |
Descrizione:
Azzera lo stato di cattura del conteggio st_capture.
CNTLOCK
| Breve descrizione | Disabilita l'aggiornamento conteggio. |
|---|---|
| Condizione | st_error=0, st_grouped=0 |
| ID comando | 83 |
Descrizione:
Disabilita l'aggiornamento del conteggio.
CNTUNLOCK
| Breve descrizione | Abilita l'aggiornamento conteggio. |
|---|---|
| Condizione | st_error=0, st_grouped=0 |
| ID comando | 83 |
Descrizione:
Abilita l'aggiornamento conteggio nel caso sia bloccato (st_cntlock=1).
CNTREV
| Breve descrizione | Direzione incremento conteggio antiorario. |
|---|---|
| Condizione | st_error=0, st_grouped=0 |
| ID comando | 84 |
Descrizione:
Imposta la direzione di incremento del conteggio ad antiorario.
CNTDIR
| Breve descrizione | Direzione incremento conteggio orario. |
|---|---|
| Condizione | st_error=0, st_grouped=0 |
| ID comando | 84 |
Descrizione:
Imposta la direzione di incremento del conteggio ad orario.
REGOFF
| Breve descrizione | Disabilitazione posizionatore ed uscita di attuazione. |
|---|---|
| Condizione | st_still=1, st_error=0, st_grouped=0 |
| ID comando | 85 |
Descrizione:
Disabilita il posizionatore e l'uscita di attuazione.
REGON
| Breve descrizione | Abilitazione posizionatore e uscita di attuazione. |
|---|---|
| Condizione | st_regoff=1, st_error=0, st_grouped=0 |
| ID comando | 85 |
Descrizione:
Abilita il posizionatore e l'uscita di attuazione.
DELCNT
| Breve descrizione | Comando di modifica di posit di un valore pari a delta. |
|---|---|
| Condizione | st_psron = 0, st_cal = 0, st_error=0, st_grouped=0, vedi descrizione |
| ID comando | 86 |
Descrizione:
Somma alla posizione attuale (posit) il valore specificato dal parametro delta. E' possibile eseguire questo comando anche se un movimento è in corso a condizione che la nuova posizione attuale permetta di concludere il posizionamento senza dover invertire la direzione di movimento.
RSPRSOK
| Breve descrizione | Reset dello stato di homing OK. |
|---|---|
| Condizione | - |
| ID comando | 87 |
Descrizione:
Azzera lo stato st_prsok.
RSERR
| Breve descrizione | Reset dello stato di errore. |
|---|---|
| Condizione | - |
| ID comando | 88 |
Descrizione:
Azzera lo stato di errore (st_error) nel caso non sia più presente la condizione di errore.
RSWRN
| Breve descrizione | Reset dello stato di warning. |
|---|---|
| Condizione | - |
| ID comando | 89 |
Descrizione:
Azzera lo stato st_warning.
7. Errori e Warnings
7.1 Errors
Quando il device non riesce ad eseguire le operazioni derivanti da una non corretta programmazione da parte dell'utente segnala questa condizione tramite l'attivazione dello stato st_error. Il device, inoltre, rende disponibili, tramite i valori sui parametri errcode, errvalue ed errpar, alcune informazioni per meglio comprendere il tipo di errore e quale condizione l'ha generato. Tali informazioni e lo stato di errore st_error, permangono finché non viene eseguito l'apposito comando RSERR che li cancella.
La seguente tabella specifica i valori assunti da errcode:
| errcode | Descrizione |
|---|---|
| 0 | Nessun errore. |
| 1 | Errore dati: Sono presenti valori fuori range nei parametri. |
| 2 | Errore di configurazione. |
Per mezzo dei parametri errvalue e errpar è possibile ottenere informazioni più dettagliate riguardo l'errore.
Il parametro errpar indica sempre l'ID del parametro che ha causato l'errore.
Invece attualmente il parametro errvalue non è utilizzato e vale sempre 0.
7.2 Warnings
Quando l'impostazione di un parametro del device non viene accettata o quando non è possibile eseguire un comando il device segnala questa condizione tramite l'attivazione dello stato st_warning.
Il device, inoltre, rende disponibili, tramite i valori sui parametri wrncode, wrnvalue e wrnpar, alcune informazioni per meglio comprendere il tipo di warning e quale condizione l'ha generato.
Tali informazioni e lo stato di warning st_warning, permangono finché non viene eseguito l'apposito comando RSWRN che li cancella.
La seguente tabella specifica i valori assunti da wrncode:
| wrncode | Descrizione |
|---|---|
| 0 | Nessun warning. |
| 1 | Impostazione dato fuori range. |
| 2 | Variazione parametro non accettata. |
| 3 | Comando non accettato: le condizioni di esecuzione non sono rispettate. |
Per mezzo dei parametri wrnvalue e wrnpar è possibile ottenere informazioni più dettagliate riguardo il warning.
Il parametro wrnpar indica sempre l'ID del parametro che ha causato il warning.
Invecde attualmente il parametro wrnvalue non è utilizzato e vale sempre 0.