目录
P1K31FB30 - 002Q : Connessioni e Setup
-
Informazioni
Release
Il presente documento è valido integralmente salvo errori od omissioni.
Release Descrizione Data 1.0 Nuovo manuale. 17/11/11 1.1 Trasporto in Wiki 19/07/13 Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
-
Microsoft® e MS-DOS® sono marchi registrati e Windows® è un marchio della Microsoft Corporation.
Descrizione
La applicazione P1K31FB30 - 002, installata nell'hardware Qmove J1-K31-FB30, è realizzata per controllare una fresa a ponte con 5 assi per la lavorazione del marmo e del granito. Di seguito riportiamo le caratteristiche principali del software P1K31FB30 - 002.
Nel resto del documento sarà nostra cura distinguere tra le caratteristiche standard disponibili subito e le caratteristiche sviluppabili in futuro e opzionali.
Caratteristiche implementate nella attuale proposta

Assi
-
Assi X, Y, Z controllati con PID di spazio (brushless o motori asincroni con inverter vettoriali).
-
Asse W per rotazione del banco con posizionamento che tiene conto dell'inerzia (motore asincrono e inverter V/F).
-
Asse H per inclinazione della testa con posizionamento che tiene conto dell'inerzia (motore asincrono e inverter V/F).
Lavorazioni
-
Funzionalità semiautomatiche per posizionamento degli assi e per tagli singoli.
-
Tagli multipli per il taglio di blocchi e lastre con rotazione del banco (W) per taglio di mattonelle.
-
Sagomatura di profili dritti con disco orizzontale o verticale.
-
Tagli a passate con lama inclinata (per macchine che permettono l'inclinazione del disco).
-
Finitura di profili dritti ottenuti con il bordo dalla lama (interpolazione YZ).
Disegni
-
Programmazione dei profili attraverso un miniCAD implementato direttamente sullo strumento.
-
Importazione di profili salvati su file DXF tramite software “Profile Importer” di conversione.
Modalità di lavoro
-
Ripetizione della sagoma programmata.
-
Impostazione del grado di precisione della finitura.
-
Modifica della velocità di movimento della lama durante la lavorazione.
-
Compensazione dello spessore e del diametro della lama.
Funzioni accessorie, segnalazioni e allarmi
-
Scelta della lingua;
-
Visualizzazione del profilo e della posizione della lama durante la lavorazione.
-
Diagnostica degli ingressi e delle uscite.
-
Backup e restore dei dati su memoria non volatile (FLASH EPROM).
-
Messaggi relativi alla anomalia in corso per facilitare l'identificazione e la soluzione del problema della macchina.
-
Messaggi di aiuto per l'operatore.
-
Interfaccia modbus per la lettura della corrente assorbita dal disco
Caratteristiche non comprese nella attuale proposta
Queste caratteristiche potranno essere implementate in una versione futura del software.
Lavorazioni opzionali (sviluppabili in futuro)
-
Profili realizzati con il banco girevole (tipo tornio verticale).
-
Tornio orizzontale per colonne.
-
Sagomatura con disco orizzontale o verticale e con taglio sagomato (interpolazione XZ o XY).
-
Copiatura tramite fotocellula di una sagoma in cartone o di un tratto nero su lavagna bianca.
Interfaccia MODBUS
-
Tramite la porta di comunicazione seriale USER, sarà possibile creare una rete MODBUS RTU (RS485) per leggere gli RPM del disco.
-
Collegamento tramite porta seriale con una banda magnetica per la lettura della posizione assoluta dell'asse.
Hardware e collegamenti
Scheda base
Alimentatore
Lo strumento dovrà essere alimentato a 24Vdc. Non sarà previsto nessun fusibile interno.
Connettività
Saranno previste in “versione standard”, nr. 2 seriali:
-
PORTA PROG → Seriale con standard logico TTL per programmazione.
-
PORTA USER → Seriale multistandard (RS232, RS422, RS485).
-
PORTA CAN → “bus di campo” tipo Canbus.
Nr. 1 Porta MMC per salvataggio/caricamento dati da memoria esterna.
J1-K31-FB30

Film standard QEM del J1-K31FB30 
Vista posteriore del J1-K31FB30 RMC-1MC01-M6

Vista anteriore del RMC-1MC01-M6 Lista I/O
In questo capitolo elenchiamo tutti gli I/O utilizzati e divisi per connettore. Per una descrizione più dettagliata di alcuni degli I/O elencati, vedere nei capitoli successivi dove viene descritto ogni singolo connettore.
Ingressi digitali (n. 12)
NOME DESCRIZIONE MORSETTO HARDWARE I1 JOG X + CN11 J1-K31FB30 I2 JOG X - I3 JOG Y + I4 JOG Y - I5 JOG Z + I6 JOG Z - I7 JOG H + I8 JOG H - I9 Selettore Manuale CN12 J1-K31FB30 I10 Selettore Automatico I11 Start rotazione disco I12 Stop rotazione disco Ingressi digitali su modulo di espansione (n. 32)
NOME DESCRIZIONE MORSETTO HARDWARE I13 Flussostato acqua OK SLOT 5 A RMC-1MC01-M6 I14 OK sequenza fasi I15 OK ausiliari I16 Emergenza fungo operatore + Barriere I17 Disco in moto I18 Banco a riposo (non sollevato) I19 Fault inverters I20 Libero I21 FC Asse X + I22 FC Asse X - I23 FC Asse Y + I24 FC Asse Y - I25 FC Asse Z + I26 FC Asse Z - I27 FC Asse H + I28 FC Asse H - I29 Termico Asse X SLOT 5 B RMC-1MC01-M6 I30 Termico Asse Y I31 Termico Asse Z I32 Termico H + Freno motore I33 Termico Asse W I34 Termico ventilazione I35 Termico disco I36 Pulsante azzeramento assi (RESTART) I37 Micro homing X I38 Micro homing Y I39 Micro homing Z I40 Micro homing H I41 Micro homing W I42 JOG W + I43 JOG W - I44 Selettore lento (tasto rilasciato) / veloce (tasto premuto) I45 Finecorsa avanti spina SLOT 3 A RMC-1MC01-M6 I46 Finecorsa indietro spina Uscite digitali (n. 8)
NOME DESCRIZIONE MORSETTO HARDWARE O1 Ciclo automatico in corso (fisso) CN15 J1-K31FB30 O2 Spia luminosa allarme (fisso) O3 Buzzer O4 Spia start disco O5 Spia stop disco O6 Spia termico disco O7 Spia inverters in fault O8 Riserva Uscite digitali su modulo di espansione (n. 32)
NOME DESCRIZIONE MORSETTO HARDWARE O9 Abilitazione / freno X [*] SLOT 6 A RMC-1MC01-M6 O10 Abilitazione / freno Y [*] O11 Abilitazione / freno Z [*] O12 Abilitazione asse H O13 Abilitazione asse W O14 Elettrovalvola acqua O15 Laser ON O16 Reset inverter O17 Consenso ribaltamento banco O18 Fine ciclo automatico O19 Abilitazione rotazione disco O20 Comando movimento W O21 Comando movimento H O22 Freno asse H O23 Freno asse W O24 Macchina in allarme O25 Comando attivazione spina conica SLOT 6 B RMC-1MC01-M6 O26 Riserva O27 Riserva O28 Riserva O29 Riserva O30 Riserva O31 Riserva O32 Riserva O33 Riserva O34 Riserva O35 Riserva O36 Riserva O37 Riserva O38 Riserva O39 Riserva O40 Riserva [*] Il comportamento dell'uscita come abilitazione o come freno viene stabilito da un parametro di setup.

Ingressi di conteggio bidirezionali (n° 3)
Nome Descrizione Connettore Hardware PHA1
PHB1Encoder X CN7 J1K31-FB30 PHA2
PHB2Encoder Y CN8 PHA3
PHB3Encoder Z CN9 PHA4
PHB4Riserva CN10 Ingressi di conteggio bidirezionali su modulo di espansione (n° 2)
Nome Descrizione Connettore Hardware PHA5
PHB5Encoder W SLOT 3 A RMC-1MC01-M6 PHA6
PHB6Encoder H SLOT 3 B Ingressi analogici (n. 2)
Name Description Connector Hardware AI1 Potenziometro velocità X+ (0-10V) CN17 J1K31-FB30 AI2 Potenziometro velocità X- (0-10V) Uscite analogiche (n. 4)
Nome Descrizione Connettore Hardware AO1 Controllo velocità asse X ±10Vdc CN16 J1K31-FB30 AO2 Controllo velocità asse Y ±10Vdc AO3 Controllo velocità asse Z ±10Vdc AO4 Riferimento velocità disco 0÷10V Uscite analogiche su modulo di espansione (n. 2)
Nome Descrizione Connettore Hardware AO5 Riferimento velocità asse W ±10V SLOT 3 A RMC-1MC01-M6 AO6 Riferimento velocità asse H ±10V SLOT 3 B Tasti funzione
Nome Descrizione Hardware F1 J1K31-FB30 F2 F3 F4 Start ciclo automatico (led on) F5 Stop ciclo automatico F6 Reset asse Y F7 Abilitazione laser F8 Abilitazione EV acqua (solo in manuale) F9 Passaggio a pagina allarmi F10 Uscita da ogni pagina (Back) F11 Abilitazione delle stato di Semiautomatico (solo da manuale) F12 Abort del programma in esecuzione (pressione per 3 s) F13 Restart del programma in esecuzione F14 F15 F16 F17 Connessioni elettriche
CN1- Power supply (Ingresso Alimentazione - 24 Vdc)

1 V in (0V) 2 Terra 3 V in (24Vdc) CN2 - PORTA USER. Seriale RS232-RS422-RS485 (isolata)
Porta seriale utilizzabile per un collegamento MODBUS RTU (RS485) con gli inverter presenti per rilevare i dati RPM e corrente assorbita.
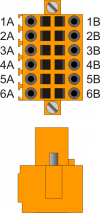
1A A - Canale A RS485 2A B - Canale B RS485 3A 0V - Comune Porta seriale. 4A 0V - Comune Porta seriale. 5A TX (Trasmissione RS232) 6A PE - Terra. 1B RX - (Ricezione “positiva” RS422) 2B RXN - (Ricezione “negativa” RS422) 3B TX - (Trasmissione “positiva” RS422) 4B TXN - (Trasmissione “negativa” RS422) 5B RX (Ricezione RS232) 6B PE - Terra. NB. Il gruppo di DIP SW2 posti sotto la porta seriale dovrà essere impostato CON IL SOLO DIP 5 POSTO A ON.
CN5 - PORTA CAN

1 0 Volt - Comune Porta seriale 2 B 3 A CN15 - 8 uscite digitali statiche (24V - 0,5 A)
Connettore Pin ID Descrizione Indirizzo 
1 V+ Alimentazione uscite (12÷28 Vdc) 2 O1 Ciclo automatico in corso (fisso) 3.OUT01 3 O2 Spia luminosa allarme (fisso) 3.OUT02 4 - n.c. 5 O3 Buzzer 3.OUT03 6 O4 Spia start disco 3.OUT04 7 0V 0V Alimentazione uscite 8 O5 Spia stop disco 3.OUT05 9 O6 Spia termico disco 3.OUT06 10 O7 Spia inverters in fault 3.OUT07 11 O8 Riserva 3.OUT08 CN11 - 8 ingressi "standard" (logica PNP)
CN12 - 8 ingressi "standard" (logica PNP)
Connettore Pin ID Descrizione Indirizzo 
1 FI2 PNP1) Riserva 1.INT06 2 FI2 NPN2) 3 0V Vout (0 V) - Comune ingressi digitali I9÷I16 4 I9 Selettore manuale 3.INP09 5 I10 Selettore automatico 3.INP10 6 I11 Start rotazione disco 3.INP11 7 I12 Stop rotazione disco 3.INP12 8 - Non collegato 9 - Non collegato 10 - Non collegato 11 - Non collegato 12 - n.c. CN7 - 1 conteggio (PP, LD)
Connettore Pin ID Descrizione Indirizzo 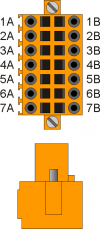
1A Internal bridge - 1A to 1B 2A PHA1 Fase A asse X PNP
Push-Pull 1)3.CNT01 3A PHB1 Fase B asse X 4A Z1 Z asse X 1.INT01 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Internal bridge - 1A to 1B 2B PHA1+ + PHA asse X Line Driver 3.CNT01 3B PHB1+ + PHB asse X 4B Z1+ + Z asse X 1.INT01 5B PHAN1 - PHA asse X 3.CNT01 6B PHBN1 - PHB asse X 7B ZN1 - Z asse X 1.INT01
1) :
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7ACN8 - 1 conteggio (PP, LD)
Connettore Pin ID Descrizione Indirizzo 1A Internal bridge - 1A to 1B 2A PHA2 Fase A asse Y PNP
Push-Pull 1)3.CNT02 3A PHB2 Fase B asse Y 4A Z2 Z asse Y 1.INT02 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Internal bridge - 1A to 1B 2B PHA2+ + PHA asse Y Line Driver 3.CNT02 3B PHB2+ + PHB asse Y 4B Z2+ + Z asse Y 1.INT02 5B PHAN2 - PHA asse Y 3.CNT02 6B PHBN2 - PHB asse Y 7B ZN2 - Z asse Y 1.INT02
1) :
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7ACN9 - 1 conteggio (PP, LD)
Connettore Pin ID Descrizione Indirizzo 1A Internal bridge - 1A to 1B 2A PHA3 Fase A asse Z PNP
Push-Pull 1)3.CNT03 3A PHB3 Fase B asse Z 4A Z3 Z asse Z 1.INT03 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Internal bridge - 1A to 1B 2B PHA3+ + PHA asse Z Line Driver 3.CNT03 3B PHB3+ + PHB asse Z 4B Z3+ + Z asse Z 1.INT03 5B PHAN3 - PHA asse Z 3.CNT03 6B PHBN3 - PHB asse Z 7B ZN3 - Z asse Z 1.INT03
1) :
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7ACN10 - 1 conteggio (PP, LD)
Connettore Pin ID Descrizione Indirizzo 1A Internal bridge - 1A to 1B 2A PHA4 Fase A asse X PNP
Push-Pull 1)3.CNT04 3A PHB4 Non utilizzato 4A Z4 1.INT04 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Internal bridge - 1A to 1B 2B PHA4+ Non utilizzato Line Driver 3.CNT04 3B PHB4+ 4B Z4+ 1.INT04 5B PHAN4 3.CNT04 6B PHBN4 7B ZN4 1.INT04
1) :
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7ACN16 - 4 uscite analogiche
Connettore Pin ID Descrizione Indirizzo 
1 GA01 Comune uscite analogiche A01÷A02 2 AO1 Controllo velocità asse X ±10V 3.AN01 3 AO2 Controllo velocità asse Y ±10V 3.AN02 4 GA02 Comune uscite analogiche A03÷A04 5 AO3 Controllo velocità asse Z ±10V 3.AN03 6 AO4 Riferimento velocità disco 0÷10V 3.AN04 CN17 - 2 ingressi analogici 12 bit (Potenz, 0-10V, 0-20mA)
Connettore Pin ID Descrizione Indirizzo 
1 GAI1 Comune ingresso analogico AI1 2 AI1 Potenziometro velocita X+ 3.AI01 3 S1V Collegare a GAI1 per AI1 come 0÷10V 4 S1C Collegare a GAI1 per AI1 come 0÷20mA 5 GAI2 Comune ingresso analogico AI2 6 AI2 Potenziometro velocita X- 3.AI02 7 S1V Collegare a GAI2 per AI2 come 0÷10V 8 S1C Collegare a GAI2 per AI2 come 0÷20mA 9 VREF +5V per alimentazione potenziometro RMC-1MC01-M6 - Power supply (Ingresso Alimentazione - 24 Vdc)

1 0V 12V erogati dallo strumento (V EXT) 2 +12V 3 Terra 4 V in (0V) 5 V in (24Vdc) RMC-1MC01-M6 - SLOT2 - PORTA CAN
1 0 Volt - Comune Porta seriale 2 B 3 A Cavo di collegamento CAN OPEN

RMC-1MC01-M6 - SLOT 3 - LATO A n.1 conteggio (PP, LD) + Nr.1 uscita anal. (±10V)
Connettore Pin ID Tipo contatto Descrizione 
1A +12V - OUT 12 Vdc 2A 0V - 3A PHA5 - Fasi encoder Driver asse W 4A - - 5A PHB5 - 6A - - 7A PHZ5 - 8A - - 9A - - Non utilizzato 10A - - 11A - - 12A - - 13A - - Comune 14A I45 NO Finecorsa avanti spina conica 15A I46 NO Finecorsa indietro spina conica 16A - - 17A - - 18A - - Non collegato 19A GA - Out +/-10V per regolazione velocità asse W 20A OUTAN4 - RMC-1MC01-M6 - SLOT 3 - LATO B
Connettore Pin ID Tipo contatto Descrizione 1B +12V - OUT 12 Vdc 2B 0V - 3B PHA6 - Fasi encoder Driver asse H 4B - - 5B PHB6 - 6B - - 7B PHZ6 - 8B - - 9B - - Non utilizzato 10B - - 11B - - 12B - - 13B - - Comune 14B - - Non utilizzato 15B - - 16B - - 17B - - 18B - - Non collegato 19B GA - Out +/-10V per regolazione velocità asse H 20B OUTAN5 - RMC-1MC01-M6 - SLOT 5 - LATO A - Ingressi digitali PNP
Connettore Pin ID Tipo contatto Descrizione 1A +12V - OUT 12 Vdc 2A 0V - 3A I13 NO Flussostato acqua OK 4A I14 NO OK sequenza fasi 5A I15 NO OK ausiliari 6A I16 NC Emergenza fungo operatore + Barriere 7A I17 NO Disco in moto 8A I18 NO Banco a riposo (non sollevato) 9A I19 NO Fault inverters 10A I20 NC Libero 11A +12V - OUT 12 Vdc 12A 0V - 13A I21 NC FC asse X+ 14A I22 NC FC asse X- 15A I23 NC FC asse Y+ 16A I24 NC FC asse Y- 17A I25 NC FC asse Z+ 18A I26 NC FC asse Z- 19A I27 NC FC asse H+ [*] 20A I28 NC FC asse H- [*] [*] I FC dell'asse H, sono da considerare diversamente a seconda se l'asse H è un asse motorizzato e con encoder oppure no.
Asse H motorizzato e con encoder. I FC H+ e H- sono da considerare degli extracorsa di sicurezza. Se vengono interessati la macchina va in allarme. L'asse H in questo caso è dotato di FC software che ne limitano la corsa. I FC hardware hanno solo uno scopo di sicurezza.
Asse H non motorizzato e senza encoder. I FC H+ e H- non generano un allarme nel caso in cui vengano interessati. Essi vengono usati per determinare se la lama è in una posizione verticale od orizzontale. Essi servono, nel caso di testa inclinabile, per abilitare le lavorazioni che prevedono la lama verticale oppure quelle che prevedono la lama orizzontale. Se, per esempio, tento di avviare una lavorazione che prevede la lama verticale, mentre essa è orizzontale o comunque inclinata, la lavorazione non potrà essere eseguita.
RMC-1MC01-M6 - SLOT 5 - LATO B - Ingressi digitali PNP
Connettore Pin ID Tipo contatto Descrizione 1B +12V - OUT 12 Vdc 2B 0V - 3B I29 NC Termico Asse Y 4B I30 NC Termico Asse Z 5B I31 NC Termico Asse Z 6B I32 NC Termico H + Freno motore 7B I33 NC Termico Asse W 8B I34 NC Termico ventilazione 9B I35 NC Termico disco 10B I36 NO Pulsante azzeramento assi (RESTART) 11B +12V - OUT 12 Vdc 12B 0V - 13B I37 NO Micro homing Asse X 14B I38 NO Micro homing Asse Y 15B I39 NO Micro homing Asse Z 16B I40 NO Micro homing Asse H 17B I41 NO Micro homing Asse W 18B I42 NO JOG W+ 19B I43 NO JOG W- 20B I44 NO Selettore per velocità in jog lenta (1) o rapida (0) RMC-1MC01-M6 - SLOT 6 - LATO A - Uscite digitali protette
Connettore Pin ID Tipo contatto Descrizione 1A V+ - Alim. Uscite 12 – 28 Vdc 2A 0V - 3A O9 - Abilitazione / freno asse X [*] 4A O10 - Abilitazione / freno asse Y [*] 5A O11 - Abilitazione / freno asse Z [*] 6A O12 - Abilitazione asse H 7A O13 - Abilitazione asse W 8A O14 - Elettrovalvola acqua 9A O15 - Attivazione laser 10A O16 - Reset inverter 11A V+ - Alim. Uscite 12 – 28 Vdc 12A 0V - 13A O17 - Consenso ribaltamento banco 14A O18 - Fine ciclo automatico 15A O19 - Abilitazione rotazione disco 16A O20 - Comando movimento asse W 17A O21 - Comando movimento asse H 18A O22 - Freno asse H 19A O23 - Freno asse W 20A O24 - Macchina in allarme (fisso) [*] Il comportamento dell'uscita come abilitazione o come freno viene stabilito da un parametro di setup.

RMC-1MC01-M6 - SLOT 6 - LATO B - Uscite digitali protette
Connettore Pin ID Tipo contatto Descrizione 1B V+ - Alim. Uscite 12 – 28 Vdc 2B 0V - 3B O25 - Comando attivazione spina conica 4B O26 - Riserva 5B O27 - Riserva 6B O28 - Riserva 7B O29 - Riserva 8B O30 - Riserva 9B O31 - Riserva 10B O32 - Riserva 11B V+ - Alim. Uscite 12 – 28 Vdc 12B 0V - 13B O33 - Riserva 14B O34 - Riserva 15B O35 - Riserva 16B O36 - Riserva 17B O37 - Riserva 18B O38 - Riserva 19B O39 - Riserva 20B O40 - Riserva Setup
Dati macchina


Il valore RPM può essere solo visualizzato. Premere  per passare alla pagina di impostazione del valore degli RPM in automatico.
per passare alla pagina di impostazione del valore degli RPM in automatico.
Il valore della corrente assorbita dal disco di taglio è solo visualizzato. 
Spessore della lama Z Posizione istantanea dell'asse Z MIN Z Minima posizione software impostata della funzione di impostazione quota di sicurezza. QUOTA SICUREZZA Quota di sicurezza impostabile, coincidente con la massima discesa dell'asse Z. Impostazione velocità rotazione lama
Premere il tasto
per accedere alla pagina di impostazione velocità lama.

∅ Diametro della lama montata sulla fresa. Scegliere il valore tramite le frecce direzionali. MARMO / GRANITO Scegliere il tipo di materiale da tagliare. Automaticamente il programma propone le due velocità di riferimento sotto il tipo di materiale e copia il valore corrispondente al materiale scelto nel campo RPM AUTO.
RPM AUTO RPM target di rotazione della lama.\\Il risultato è una tensione 0-10 Vdc dato dalla formula: Vdc = (10 * RPM AUTO) / MAX RPM DISCO dove MAX RPM DISCO è impostato nel setup generico (cap. 5.7)
E' possibile modificare questo valore fino ad un massimo del 30% in più o in meno del valore proposto.Premendo il tasto
 e digitando la password 462 si passa alla pagina di impostazione tabella RPM.
e digitando la password 462 si passa alla pagina di impostazione tabella RPM.

In questa pagina è possibile impostare i diversi valori dei diametri delle lame con associati i valori di velocità della lama in RPM per i due tipi di materiale.

Accesso all'area di setup tramite inserimento di password Accesso al setup
L'accesso al setup può essere fatto dalla pagina di DATI MACCHINA, introducendo la password 462.
Introduzione al SETUP
L'area di setup è suddivisa in tre aree:
-
Elenco dei parametri suddiviso in
-
 parametri generici;
parametri generici; -
 parametri associati all'asse X;
parametri associati all'asse X; -

 parametri associati all'asse Y;
parametri associati all'asse Y; -

 parametri associati all'asse Z;
parametri associati all'asse Z; -

 parametri associati all'asse W;
parametri associati all'asse W; -

 parametri associati all'asse H.
parametri associati all'asse H.
Procedure di calibratura e taratura degli assi-
 Taratura asse X;
Taratura asse X; -
 Taratura asse Y;
Taratura asse Y; -
 Taratura asse Z.
Taratura asse Z.
Procedure di salvataggio / caricamento dei dati su supporto removibile.-
 Salvataggio/caricamento dati
Salvataggio/caricamento dati
Abilitazione delle lavorazioni (protetto da password 100177)-
 Abilitazione delle lavorazioni
Abilitazione delle lavorazioni
Setup Generico

Nome parametro Unità di misura Default Range Descrizione ERRORE MASSIMO IN FINITURA mm 0.1 (preciso), 0.5 (normale) 0 ÷ 99.9 Errore applicato durante la finitura associato al tipo di finitura selezionato in questo momento
I tre tipi di finitura (qualità) sono HIGH, MEDIUM e LOW e sono quelli selezionabili durante la programmazione della finitura di un profilo.STRATEGIA IN
FINITURA- Err limit
(preciso)
Mix limit
(normale)
Vel limit
(rapido)Err limit, Mix limit,
Vel limitStrategia applicata durante la finitura associato ad ogni modalità di interpolazione
I tre tipi di finitura (qualità) sono HIGH, MEDIUM e LOW e sono quelli selezionabili durante la programmazione della finitura di un profilo.MODELLO - iP5A - Comunicazione modbus con inverter per la lettura della corrente assorbita. Si possono scegliere dei modelli standard oppure crearne uno custom.
I parametri fissi sono 8 BIT DATI, PARITA' NESSUNA e 1 BIT DI STOP
iP5A : inverter LS modello iP5A
iG5A : inverter LS modello iG5A
iS7 : inverter LS modello iS7
CUSTOM : è possibile impostare ilvalore di BAUD RATE, INDIRIZZO e TIMEOUT.
NONE : trasmissione modbus disabilitataVEL COMUNIC. - 19200 - Baud rate per la comunicazione in modbus. E' possibile impostare il dato solo in con il modello CUSTOM. INDIRIZZO DATO - - - Indirizzo dove leggere il dato di corrente. E' possibile impostare il dato solo in con il modello CUSTOM. TIMEOUT - 1000 - Timeout di comunicazione modbus. E' possibile impostare il dato solo in con il modello CUSTOM. RPM DISCO A 10V Giri/' 2480 0 ÷ 4000 Giri al minuto del disco massimi in lettura. % AMPERE A 10V % 150% 0 ÷ 150% % di corrente associata alla massima corrente in lettura. LOGICA TERMICO DISCO - NO NC , NO NO : il termico del disco (I35) da allarme quando è ON
NC : il termico del disco (I35) da allarme quando è OFFTEMPO LASER secondi 0 0 ÷ 999999 Tempo di attivazione del laser se acceso da un movimento dell'asse Y. Dopo questo tempo il laser si spegne automaticamente. FILTRO
FLUSSOSTATOsecondi 0 0 ÷ 999999 Il controllo del flussostato disattivo viene segnalato
dopo questo tempo (evita la segnalazione di eventuali bolle d'aria).UTILIZZO
HOMING- 1 0, 1, 2, 3 0: homing obbligatorio per poter eseguire qualsiasi
operazione;
1: homing non obbligatorio, è possibile ignorare la
richiesta e continuare ad usare la macchina;
2: homing obbligatorio per i cicli automatici, sono
permessi solo i movimenti manuali
3: homing obbligatorio per poter eseguire qualsiasi
operazione. La procedura di homing viene avviata
automaticamente semza premere il tasto “START”.
Deve essere impostata questa modalità se TUTTI
gli assi acquisiscono la loro posizione via seriale.ANGOLO LIMITE gradi 90° 0 ÷ 180° Quando la variazione di direzione durante
la finitura supera questo angolo, viene
inserito automaticamente un punto di pausa del
movimento. Il movimento riprende
automaticamente quando tutti gli assi coinvolti
nell'interpolazione sono fermi e in tolleranza.MIN. INGR. ANALOGICO bit 5 0 ÷ 127 Lettura minima degli ingressi analogici al di sotto della quale il valore letto si considera zero. BUZZER HMI - ABIL. ABIL., DISABIL. Abilitazione del buzzer sull'interfaccia operatore ogni volta che l'operatore preme un tasto o tocca lo schermo. DELTA O17 mm 100 0 ÷ 999999 Delta di posizione, nell'intorno alle quote minima e massima dell'asse X, entro il quale si attiva l'uscita O17 di Consenso Ribaltamento Banco. TIPO ON O17 - MIN.MAX MIN.POS
MAX.POS
MIN.MAXMIN.POS: l'uscita O17 di Consenso Ribaltamento Banco si attiva solo nell'intorno della posizione X minima.
MAX.POS: l'uscita O17 di Consenso Ribaltamento Banco si attiva solo nell'intorno della posizione X massima.
MIN.MAX: l'uscita O17 di Consenso Ribaltamento Banco si attiva nell'intorno della posizione X minima e X massima.VISUALIZZA TARGET - 0 0,1 0: il conteggio dell'asse visualizza la posizione effettiva;
1: il conteggio dell'asse visualizza la quota target se la posizione è entro la tolleranza.Abilitazioni

Nome parametro Unità di misura Default Range Descrizione AB. TAGLI
INCLINATI- DISABIL. ABIL., DISABIL. Abilitazione della lavorazione “Tagli inclinati”. ABILITA PROFILO A 0° - DISABIL. ABIL., DISABIL. Abilitazione della lavorazione di “Profili con lama a 0°” (verticale). ABILITA PROFILO A 90° - DISABIL. ABIL., DISABIL. Abilitazione della lavorazione di “Profili con lama a 90°” (orizzontale). ABILITA FINITURA - DISABIL. ABIL., DISABIL. Abilitazione della lavorazione di “Finitura” dei profili. Parametri associati all'asse X

Nome parametro Unità di misura Default Range Descrizione RISOLUZIONE - 1/1 0.00374 ÷ 4.00000 Numeratore/Denominatore
Numeratore.
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati nel denominatore.
Denominatore.
Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel numeratore.TOLLERANZA mm 0÷99999.9 Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto. T ABILITAZIONE Secondi 0 ÷ 10.0 Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. T DISABILITAZIONE Secondi 0 ÷ 10.0 Tempo di disabilitazione dopo la fine dello spostamento dell'asse. MODO ABILITAZIONE - FRENO DRIVE , FRENO Gestione dell'uscita “Abilitazione drive / freno“
FRENO: modalità freno. L'uscita si attiva T ABILITAZIONE prima del movimento dell'asse e si spegne T DISABILITAZIONE dopo la fine del movimento. Se tra un movimento ed il successivo passa un tempo inferiore a T ABILITAZIONE l'uscita non si disattiva.
DRIVE: modalità abilitazione. L'uscita si disattiva solo in caso di allarme della macchina. Al ripristino dell'allarme l'uscita si attiva, ma la chiusura dell'anello di spazio avviene T ABILITAZIONE dopo.MODO JOG - LOOPOFF LOOPOFF , LOOPON LOOPOFF: modalità non retroazionata. Dopo un movimento in jog, l'asse stacca la retroazione.
LOOPON: modalità retroazionata. Dopo un movimento in jog, l'asse rimane con la retroazione attiva.MASSIMA POS. mm 99999.9 0÷99999.9 Massima quota raggiungibile dall'asse. MINIMA POS. mm -99999.9 -99999.9÷0 Minima quota raggiungibile dall'asse. HOMING POS. mm 0.0 -99999.9
÷99999.9Quota associata all'asse durante la procedura di homing HOMING MODE - 0 0, 1, 2, 3 0: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione rallentando e, sul fronte di discesa relativo al segnale di camma, carica la quota PRESET POS..
1: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione ed in lento acquisisce il primo impulso di zero (dopo la disattivazione del segnale di camma).
2: Non viene attivata la procedura di homing con movimentazione dell'asse. Il conteggio viene aggiornato alla PRESET POS. all'attivazione del sensore di homing.
3: l'acquisizione della posizione avviene via serialeHOMING DIRECTION - 0 0, 1 Direzione verso cui si muove l'asse al momento dell'avvio dell'homing:
0: avanti,
1: indietro.VEL RAPIDA HOMING mm/' 100 0 ÷ massima velocità E' la prima velocità di ricerca del sensore di homing. VEL LENTA HOMING mm/' 50 0 ÷ massima velocità E' la velocità per il rilascio del sensore di homing. SEQUENZA DI HOMING - Sì NO, SI' NO: l'homing per questo asse non viene eseguito durante la sequenza di homing automatica.
SI': durante la sequenza di homing automatica verrà eseguito l'homing anche di questo asse.AUTO - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato in automatico. AUTO - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato in automatico. MAN - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato nei movimenti in jog. MAN - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato nei movimenti in jog. VEL + mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse X verso direzioni positive nei cicli automatici. VEL - mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse X verso direzioni negative nei cicli automatici. VEL RAPIDA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse X verso direzioni positive nello stato manuale. VEL LENTA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse X verso direzioni negative nello stato manuale. MAX VEL INTERP. % 80 0 ÷ 100 E' una percentuale della massima velocità consentita durante l'interpolazione. CONTROLLO ENCODER V
/
mm/100.0
/
00.0 ÷ 10.0 V
/
-999999 ÷ 999999Numeratore.
Quando la tensione di riferimento per questo asse supera questo valore, l'asse deve compiere uno spazio in impulsi encoder pari al denominatore in 1/10 di secondo altrimenti viene generato un allarme sul malfunzionamento dell'encoder.
Con valore 0 (zero) il controllo è disabilitato.
Denominatore.
Vedi numeratore.PARCHEGGIO - DISABILITATO DISABILITATO , ABILITATO DISABILITATO: A fine lavorazione l'asse rimane dove si trova
ABILITATO: A fine lavorazione l'asse si porta sul finecorsa minimoPOSIZIONE mm - - Valore della posizione assoluta dell'asse. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse Y

Nome parametro Unità di misura Default Range Descrizione RISOLUZIONE - 1/1 0.00374 ÷ 4.00000 Numeratore/Denominatore
Numeratore.
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati nel denominatore.
Denominatore.
Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel numeratore.CIFRE DECIMALI - 2 0, 1, 2 Numero di cifre decimali usate solo all'interno del setup. In visualizzazione saranno mostrate CIFRE DECIMALI-1. ALL, TOLLERANZA mm 0÷99999.9 Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto.
Se ALL è abilitato (ENABLE) allora il sistema genererà un allarme in caso di posizionamento fuori tolleranza.T ABILITAZIONE Secondi 0 ÷ 10.0 Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. T DISABILITAZIONE Secondi 0 ÷ 10.0 Tempo di disabilitazione dopo la fine dello spostamento dell'asse. MODO ABILITAZIONE - FRENO DRIVE , FRENO Gestione dell'uscita “Abilitazione drive / freno“
FRENO: modalità freno. L'uscita si attiva T ABILITAZIONE prima del movimento dell'asse e si spegne T DISABILITAZIONE dopo la fine del movimento. Se tra un movimento ed il successivo passa un tempo inferiore a T ABILITAZIONE l'uscita non si disattiva.
DRIVE: modalità abilitazione. L'uscita si disattiva solo in caso di allarme della macchina. Al ripristino dell'allarme l'uscita si attiva, ma la chiusura dell'anello di spazio avviene T ABILITAZIONE dopo.MODO JOG - LOOPOFF LOOPOFF , LOOPON LOOPOFF: modalità non retroazionata. Dopo un movimento in jog, l'asse stacca la retroazione.
LOOPON: modalità retroazionata. Dopo un movimento in jog, l'asse rimane con la retroazione attiva.MASSIMA POS. mm 99999.9 0÷99999.9 Massima quota raggiungibile dall'asse. MINIMA POS. mm -99999.9 -99999.9÷0 Minima quota raggiungibile dall'asse. HOMING POS. mm 0.0 -99999.9
÷99999.9Quota associata all'asse durante la procedura di homing HOMING MODE - 0 0, 1, 2, 3 0: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione rallentando e, sul fronte di discesa relativo al segnale di camma, carica la quota PRESET POS..
1: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione ed in lento acquisisce il primo impulso di zero (dopo la disattivazione del segnale di camma).
2: Non viene attivata la procedura di homing con movimentazione dell'asse. Il conteggio viene aggiornato alla PRESET POS. all'attivazione del sensore di homing.
3: l'acquisizione della posizione avviene via serialeHOMING DIRECTION - 0 0, 1 Direzione verso cui si muove l'asse al momento dell'avvio dell'homing:
0: avanti,
1: indietro.VEL RAPIDA HOMING mm/' 100 0 ÷ massima velocità E' la prima velocità di ricerca del sensore di homing. VEL LENTA HOMING mm/' 50 0 ÷ massima velocità E' la velocità per il rilascio del sensore di homing. SEQUENZA DI HOMING - Sì NO, SI' NO: l'homing per questo asse non viene eseguito durante la sequenza di homing automatica.
SI': durante la sequenza di homing automatica verrà eseguito l'homing anche di questo asse.AUTO - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato in automatico. AUTO - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato in automatico. MAN - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato nei movimenti in jog. MAN - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato nei movimenti in jog. VEL AUTO + mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni positive nei cicli automatici. VEL AUTO - mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni negative nei cicli automatici. VEL RAPIDA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni positive nello stato manuale. VEL LENTA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni negative nello stato manuale. MAX VEL INTERP. % 80 0 ÷ 100 E' una percentuale della massima velocità consentita durante l'interpolazione. STOP ASSE - STOP STOP, MAX, MIN Comportamento dell'asse alla fine della lavorazione
“Tagli multipli”:
STOP: l'asse rimane fermo.
MAX: l'asse si sposta sul FC massimo.
MIN: l'asse si sposta sul FC minimo.CONTROLLO ENCODER V
/
mm/100.0
/
00.0 ÷ 10.0 V
/
-999999 ÷ 999999Numeratore.
Quando la tensione di riferimento per questo asse supera questo valore, l'asse deve compiere uno spazio in impulsi encoder pari al denominatore in 1/10 di secondo altrimenti viene generato un allarme sul malfunzionamento dell'encoder.
Con valore 0 (zero) il controllo è disabilitato.
Denominatore.
Vedi numeratore.PARCHEGGIO - DISABILITATO DISABILITATO , ABILITATO DISABILITATO: A fine lavorazione l'asse rimane dove si trova
ABILITATO: A fine lavorazione l'asse si porta sul finecorsa minimoPOSIZIONE mm - - Parametri associati all'asse Y (per correzione)

Nome parametro Unità di misura Default Range Descrizione STATO CORREZIONE - DISABIL. DISABIL. ABILIT. PULSE DISABIL.: correzione del posizionamento disabilitato;
ABILIT. PULSE: posizionamento dell'asse Y mediante impulsi di tensione e retroazione sulla riga magnetica.QUOTA AVVICINAMENTO mm 0,00 0,00 ÷ 999,99 Spazio prima della quota target eseguito con microspostamenti. Correzione a impulsi TEMPO PASSO s 0,000 0,000 ÷ 99,999 Durata dell'impulso di tensione. TEMPO TRA PASSI s 0,000 0,000 ÷ 99,999 Tempo tra un impulso ed il successivo. NUMERO DI PASSI - 0 0 ÷ 99999 Numero di impulsi eseguiti nello spazio di avvicinamento. VOLT PASSO V 0,00 0,0 ÷ 10,0 Ampiezza dell'impulso di tensione. POSIZIONE Y mm - - Valore della posizione assoluta del motore. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse Z

Nome parametro Unità di misura Default Range Descrizione RISOLUZIONE - 1/1 0.00374 ÷ 4.00000 Numeratore/Denominatore
Numeratore.
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati nel denominatore.
Denominatore.
Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel numeratore.ALL, TOLLERANZA mm 0÷99999.9 Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto.
Se ALL è abilitato (ENABLE) allora il sistema genererà un allarme in caso di posizionamento fuori tolleranza.QUOTA SICUREZZA mm 2 0÷99999.9 Quota di risalita dell'asse Z per essere considerata fuori ingombro durante i cicli automatici. T ABILITAZIONE Secondi 0 ÷ 10.0 Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. T DISABILITAZIONE Secondi 0 ÷ 10.0 Tempo di disabilitazione dopo la fine dello spostamento dell'asse. MODO ABILITAZIONE - FRENO DRIVE , FRENO Gestione dell'uscita “Abilitazione drive / freno“
FRENO: modalità freno. L'uscita si attiva T ABILITAZIONE prima del movimento dell'asse e si spegne T DISABILITAZIONE dopo la fine del movimento. Se tra un movimento ed il successivo passa un tempo inferiore a T ABILITAZIONE l'uscita non si disattiva.
DRIVE: modalità abilitazione. L'uscita si disattiva solo in caso di allarme della macchina. Al ripristino dell'allarme l'uscita si attiva, ma la chiusura dell'anello di spazio avviene T ABILITAZIONE dopo.MODO JOG - LOOPOFF LOOPOFF , LOOPON LOOPOFF: modalità non retroazionata. Dopo un movimento in jog, l'asse stacca la retroazione.
LOOPON: modalità retroazionata. Dopo un movimento in jog, l'asse rimane con la retroazione attiva.MASSIMA POS. mm 99999.9 0÷99999.9 Massima quota raggiungibile dall'asse. MINIMA POS. mm -99999.9 -99999.9÷0 Minima quota raggiungibile dall'asse. HOMING POS. mm 0.0 -99999.9
÷99999.9Quota associata all'asse durante la procedura di homing HOMING MODE - 0 0, 1, 2, 3 0: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione rallentando e, sul fronte di discesa relativo al segnale di camma, carica la quota PRESET POS..
1: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione ed in lento acquisisce il primo impulso di zero (dopo la disattivazione del segnale di camma).
2: Non viene attivata la procedura di homing con movimentazione dell'asse. Il conteggio viene aggiornato alla PRESET POS. all'attivazione del sensore di homing.
3: l'acquisizione della posizione avviene via serialeHOMING DIRECTION - 0 0, 1 Direzione verso cui si muove l'asse al momento dell'avvio dell'homing:
0: avanti,
1: indietro.VEL RAPIDA HOMING mm/' 100 0 ÷ massima velocità E' la prima velocità di ricerca del sensore di homing. VEL LENTA HOMING mm/' 50 0 ÷ massima velocità E' la velocità per il rilascio del sensore di homing. SEQUENZA DI HOMING - Sì NO, SI' NO: l'homing per questo asse non viene eseguito durante la sequenza di homing automatica.
SI': durante la sequenza di homing automatica verrà eseguito l'homing anche di questo asse.AUTO - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato in automatico. AUTO - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato in automatico. MAN - T ACCELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per accelerare da fermo alla velocità massima applicato nei movimenti in jog. MAN - T DECELERAZIONE Secondi 1.00 0 ÷ 10.0 Definisce il tempo necessario all'asse per decelerare dalla velocità massima a zero applicato nei movimenti in jog. VEL AUTO + mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni positive nei cicli automatici. VEL AUTO - mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni negative nei cicli automatici. VEL RAPIDA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni positive nello stato manuale. VEL LENTA JOG mm/' 10 0 ÷ massima velocità E' il limite massimo della velocità dell'asse verso direzioni negative nello stato manuale. MAX VEL INTERP. % 80 0 ÷ 100 E' una percentuale della massima velocità consentita durante l'interpolazione. CONTROLLO ENCODER V
/
mm/100.0
/
00.0 ÷ 10.0 V
/
-999999 ÷ 999999Numeratore.
Quando la tensione di riferimento per questo asse supera questo valore, l'asse deve compiere uno spazio in impulsi encoder pari al denominatore in 1/10 di secondo altrimenti viene generato un allarme sul malfunzionamento dell'encoder.
Con valore 0 (zero) il controllo è disabilitato.
Denominatore.
Vedi numeratore.PARCHEGGIO - DISABILITATO DISABILITATO , ABILITATO DISABILITATO: A fine lavorazione l'asse rimane dove si trova
ABILITATO: A fine lavorazione l'asse si porta sul finecorsa minimoPOSIZIONE mm - - Valore della posizione assoluta dell'asse. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse Z (per correzione)

Nome parametro Unità di misura Default Range Descrizione STATO CORREZIONE - DISABIL. DISABIL. ABILIT. PULSE DISABIL.: correzione del posizionamento disabilitato;
ABILIT. PULSE: posizionamento dell'asse Z mediante impulsi di tensione e retroazione sulla riga magnetica.QUOTA AVVICINAMENTO mm 0,00 0,00 ÷ 999,99 Spazio prima della quota target eseguito con microspostamenti. Correzione a impulsi TEMPO PASSO s 0,000 0,000 ÷ 99,999 Durata dell'impulso di tensione. TEMPO TRA PASSI s 0,000 0,000 ÷ 99,999 Tempo tra un impulso ed il successivo. NUMERO DI PASSI - 0 0 ÷ 99999 Numero di impulsi eseguiti nello spazio di avvicinamento. VOLT PASSO V 0,00 0,0 ÷ 10,0 Ampiezza dell'impulso di tensione. POSIZIONE Z mm - - Valore della posizione assoluta del motore. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse W

Nome parametro Unità di misura Default Range Descrizione ABILITA ASSE W - DISABIL. DISABIL., ABILIT. Abilitazione dell'asse W e di tutte le lavorazioni e le emergenze associate a questo asse. RISOLUZIONE - 1/1 0.00374 ÷ 4.00000 Numeratore/Denominatore
Numeratore.
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati nel denominatore.
Denominatore.
Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel numeratore.CIFRE DECIMALI - 2 0, 1, 2 Numero di cifre decimali. TOLLERANZA ° 0,05° 0 ÷ 2,00° Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto. T ABILITAZIONE Secondi 0 ÷ 10.0 Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. T DISABILITAZIONE Secondi 0 ÷ 10.0 Tempo di disabilitazione dopo la fine dello spostamento dell'asse. RALLENTAMENTO ° 0.05° 0 ÷ 90.00° Angolo di approccio. Angolo prima dell'angolo da
raggiungere in cui la velocità dell'asse viene
rallentata.INERZIA + ° 0.00° 0 ÷ 90.00° Angolo di inerzia applicato durante i movimenti
avanti.INERZIA - ° 0.00° 0 ÷ 90.00° Angolo di inerzia applicato durante i movimenti
indietro.MODO INERZIA - NO RICALC. NO RICALC., RICALC. NO TOLL.,
RICALC.Indica il tipo di ricalcolo inerzia eseguito al termine
del posizionamento:
NO RICALC. = ricalcolo inerzie disabilitato.
RICALC. NO TOLL. = ricalcolo inerzie eseguito solo se il posizionamento si conclude fuori tolleranza.
RICALC. = ricalcolo inerzie eseguito ad ogni posizionamento.RIT. CALCOLO INERZIA Secondi 0,2 0 ÷ 10.0 Tempo che trascorre tra la fermata dell'asse e il controllo che questo sia in tolleranza. RECUP.GIOCHI - NO NO,
AVANTI,
INDIETRO,
AVANTI NO RALL.,
INDIETRO NO RALL.Seleziona il tipo di recupero giochi:
NO = posizionamento senza recupero giochi.
AVANTI = posizionamento con recupero giochi avanti.
INDIETRO = posizionamento con recupero giochi indietro.
AVANTI NO RALL. = posizionamento con recupero giochi avanti
senza rallentamento.
INDIETRO NO RALL.=posizionamento con recupero giochi indietro senza rallentamento.OLTREQUOTA ° 0 0 ÷ 90.00° Oltrequota per il recupero giochi. Se impostato a
zero non viene eseguito il recupero giochi.VEL RAPIDA % 10 0 ÷ 100 Vedi SETUP X VEL LENTA % 10 0 ÷ 100 VEL RAPIDA JOG % 10 0 ÷ 100 VEL LENTA JOG % 10 0 ÷ 100 SEQUENZA DI HOMING - Sì NO, Sì HOMING POS. ° 0° -180°÷ 180° HOMING MODE - 0 0,1, 2, 3 HOMING DIRECTION - 0 0,1 MASSIMA POS. - 0 -180°÷ 180° MINIMA POS. - 0 -180°÷ 180° POSIZIONE ° - - Valore della posizione assoluta dell'asse. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse W (impulsi)

Nome parametro Unità di misura Default Range Descrizione STATO CORREZIONE - DISABIL. DISABIL., ABILIT. PULSE DISABIL.: correzione del posizionamento disabilitato;
ABILIT. PULSE: posizionamento dell'asse W mediante impulsi di tensioneQUOTA AVVICINAMENTO ° 0,00 0,00 ÷ 999,99 Spazio prima della quota target eseguito con microspostamenti. TEMPO PASSO s 0,000 0,000 ÷ 99,999 Durata dell'impulso di tensione. TEMPO TRA PASSI s 0,000 0,000 ÷ 99,999 Tempo tra un impulso ed il successivo. NUMERO DI PASSI - 0 0 ÷ 99999 Numero di impulsi eseguiti nello spazio di avvicinamento. VOLT PASSO V 0,00 0,0 ÷ 10,0 Ampiezza dell'impulso di tensione. SPINE - DISABIL. DISABIL., ABILIT. DISABIL.: inserimento spine coniche dopo il posizionamento disabilitato
ABILIT. : inserimento spine coniche dopo il posizionamento abilitatoRIT. INSERZIONE Secondi 0,2 0 ÷ 10.0 Tempo che trascorre tra l'inserzione delle spine e l'intervento del freno del motore. POSIZIONE ° - - Valore della posizione assoluta del motore. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse H

Nome parametro Unità di misura Default Range Descrizione TIPO MECCANICA - TESTA TRAVE,
TESTATRAVE: l'inclinazione della lama si ottiene inclinando tutta la trave.
TESTA: l'inclinazione della lama si ottiene inclinando solo la testa.MOTORE ASSE H - DISABIL. DISABIL., ABILIT. Abilitazione della motorizzazione dell'asse H e di tutte le emergenze associate a questo asse. ENCODER ASSE H - DISABIL. DISABIL., ABILIT. Abilitazione dell'encoder dell'asse H. RISOLUZIONE - 1/1 0.00374 ÷ 4.00000 Numeratore/Denominatore
Numeratore.
Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati nel denominatore.
Denominatore.
Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel numeratore.CIFRE DECIMALI - 2 0, 1, 2 Numero di cifre decimali. TOLLERANZA ° 0,05° 0 ÷ 2,00° Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto. T ABILITAZIONE Secondi 0 ÷ 10.0 Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. T DISABILITAZIONE Secondi 0 ÷ 10.0 Tempo di disabilitazione dopo la fine dello spostamento dell'asse. RALLENTAMENTO ° 0.05° 0 ÷ 90.00° Angolo di approccio. Angolo prima dell'angolo da
raggiungere in cui la velocità dell'asse viene
rallentata.INERZIA + ° 0.00° 0 ÷ 90.00° Angolo di inerzia applicato durante i movimenti
avanti.INERZIA - ° 0.00° 0 ÷ 90.00° Angolo di inerzia applicato durante i movimenti
indietro.MODO INERZIA - NO RICALC. NO RICALC., RICALC. NO TOLL.,
RICALC.Indica il tipo di ricalcolo inerzia eseguito al termine
del posizionamento:
NO RICALC. = ricalcolo inerzie disabilitato.
RICALC. NO TOLL. = ricalcolo inerzie eseguito solo se il posizionamento si conclude fuori tolleranza.
RICALC. = ricalcolo inerzie eseguito ad ogni posizionamento.RIT. CALCOLO INERZIA Secondi 0,2 0 ÷ 10.0 Tempo che trascorre tra la fermata dell'asse e il controllo che questo sia in tolleranza. RECUP.GIOCHI - NO NO,
AVANTI,
INDIETRO,
AVANTI NO RALL.,
INDIETRO NO RALL.Seleziona il tipo di recupero giochi:
NO = posizionamento senza recupero giochi.
AVANTI = posizionamento con recupero giochi avanti.
INDIETRO = posizionamento con recupero giochi indietro.
AVANTI NO RALL. = posizionamento con recupero giochi avanti
senza rallentamento.
INDIETRO NO RALL.=posizionamento con recupero giochi indietro senza rallentamento.OLTREQUOTA ° 0 0 ÷ 90.00° Oltrequota per il recupero giochi. Se impostato a
zero non viene eseguito il recupero giochi.VEL RAPIDA % 10 0 ÷ 100 Vedi SETUP X VEL LENTA % 10 0 ÷ 100 VEL RAPIDA JOG % 10 0 ÷ 100 VEL LENTA JOG % 10 0 ÷ 100 SEQUENZA DI HOMING - Sì NO, Sì HOMING POS. ° 0° 0°÷ 90° HOMING MODE - 0 0,1, 2, 3 HOMING DIRECTION - 0 0,1 MASSIMA POS. - 0 0°÷ 90° MINIMA POS. - 0 0°÷ 90° POSIZIONE ° - - Valore della posizione assoluta dell'asse. E' un parametro di servizio che permette di agire sulla quota dell'asse. Parametri associati all'asse H (linearizzazione)

Nome parametro Unità di misura Default Range Descrizione CONVERSIONE - DISABIL. DISABIL., ABILIT. DISABIL.: il conteggio non è linearizzato.
ABILIT.: il conteggio è linearizzato secondo la tabella riportata sotto.QUOTA 1 … QUOTA 10 - - 0°÷ 90° Se la linearizzazione è abilitata, il conteggio visualizzato dell'asse H corrisponde al valore interpolato tra i due valori immediatamente precedenti e successivi riportati sulla colonna VISUAL. Taratura asse X

Di seguito forniremo un elenco di operazioni da eseguire per la taratura della controllo di spazio degli assi (PI + FF). La retroazione di spazio permette di correggere la posizione dell'asse in funzione dell'errore di inseguimento rilevato. In questa pagina i dati in giallo sono quelli che consentono la parametrizzazione della taratura dell'asse. Mentre i dati in verde sono dati di servizio che perdono il loro significato quando si esse da questa pagina.
Nome parametro Unità di misura Default Range Descrizione OFFSET Volt 0 0.0 ÷ 10.0 Valore di tensione che viene sommato all'uscita
analogica per compensare l'offset di tensione
dell'impianto.MAX VELOCITA' mm/' 100 0 ÷ 999999 Velocità dell'asse corrispondente a 10V erogati
dall'uscita analogica.FEEDFORWARD % 100 0.0 ÷ 100.0 È il coefficiente percentuale che, moltiplicato per la
velocità, genera la parte feed-forward dell'uscita di
regolazione.PROP. GAIN - 0 È il coefficiente che moltiplicato per l'errore di
inseguimento genera la parte proporzionale
dell'uscita di regolazione.T. INTEGRALE s 0 È il tempo che produce il coefficiente di
integrazione dell'errore di inseguimento.
L'integrazione di tale errore moltiplicata per tale
coefficiente genera la parte integrale dell'uscita di
regolazione.MAX ERR. INSEG. mm 999999,9 Definisce il massimo scostamento accettabile tra la
posizione teorica e la posizione reale dell'asse.Le seguenti operazioni devono essere eseguite una volta che sono stati impostati i seguenti parametri nelle pagine dei parametri dell'asse:
-
RISOLUZIONE: impostare la risoluzione corretta.
-
MASSIMA POSIZIONE: inserire un valore molto grande positivo (Es.: 9999 mm)
-
MINIMA POSIZIONE: inserire un valore molto grande negativo (Es.: - 9999 mm)
Impostazione OFFSET
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
 Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Si vuole impostare Il parametro OFFSET per compensare l'offset di qualche decina di mV presente sull'uscita analogica associata all'asse.
1 Posizionare l'asse al centro della sua corsa 2 Attivare la calibratura dell'asse premendo il tasto 
3 Con la calibratura attiva il tasto diventa 
4 Per avviare l'autotaratura del parametro OFFSET premere il tasto 
5 Il tasto  lampeggia per tutta la durata dell'autotaratura. Quando smette di lampeggiare l'OFFSET è stato tarato.
lampeggia per tutta la durata dell'autotaratura. Quando smette di lampeggiare l'OFFSET è stato tarato.6 E' possibile eseguire una correzione manuale del valore dell'OFFSET tramite i pulsanti  e
e  .
.7 Disattivare la calibratura con il tasto 
8 Quando la calibratura è disattivata il tasto diventa 
Verifica conteggio e senso di rotazione
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Si deve verificare che ad una tensione in uscita maggiore di 0 (zero) corrisponda una variazione incrementale della posizione dell'asse.
1 Posizionare l'asse al centro della sua corsa 2 Attivare la calibratura dell'asse premendo il tasto 3 Con la calibratura attiva il tasto diventa 4 Inserire un valore positivo nel parametro VOUT. 5 Verificare che il valore del parametro POSIZIONE si incrementi. 6  Se il senso di rotazione del motore non è corretto si deve intervenire sul cablaggio invertendo i segnali PHA e
Se il senso di rotazione del motore non è corretto si deve intervenire sul cablaggio invertendo i segnali PHA e
PHB.7 Disattivare la calibratura con il tasto 
8 Quando la calibratura è disattivata il tasto diventa Determinazione della velocità massima
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Determinare la velocità di movimento dell'asse che corrisponde ad una tensione di 10V in uscita.
1 Posizionare l'asse al centro della sua corsa 2 Attivare la calibratura dell'asse premendo il tasto 3 Con la calibratura attiva il tasto diventa 4 Leggere il valore visualizzato nel parametro VELOCITA'. 5 Determinare il valore del parametro MAX VELOCITA' con la formula:  .
.6 Disattivare la calibratura con il tasto 7 Quando la calibratura è disattivata il tasto diventa Determinazione dei parametri per la retroazione di spazio
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
I parametri interessati sono FEEDFORWARD, PROP. GAIN e T INTEGRALE. Una volta eseguite correttamente le fasi precedenti, continuare con le seguenti.
1 Posizionare l'asse al centro della sua corsa 2 Inserire il valore 100.0% nel parametro FEEDFORWARD. 3 Inserire il valore 1 nel parametro PROP. GAIN. 4 Se il valore ERRORE INSEG. è diverso da 0 (zero), si potrà notare un movimento dell'asse che tende a ridurre tale valore. 5 Inserire ora una valore di spazio nel parametro DELTA e un valore di velocità nel parametro SET VELOCITA'
(minore del valore di MAX VELOCITA').6 Toccare il seguente tasto per avviare la successione di movimenti dell'asse. 
7 L'asse in taratura inizierà un movimento in avanti di uno spazio pari a DELTA ad una velocità SET VELOCITA'. 8 Una volta concluso il primo posizionamento ritornerà nella posizione iniziale dopo una pausa di 1 s per poi riprendere il movimento. 9 Durante questi movimenti è possibile controllare il valore di ERRORE INSEG. e agire sui parametri FEEDFORWARD e PROP. GAIN per cercare di mantenerlo a valori più bassi possibile.
I criteri da seguire sono:
- Aumentare gradualmente il valore di PROP. GAIN finché l'asse non vibra eccessivamente nella fase di arresto. A quel punto ridurre leggermente il valore per avere un comportamento accettabile.
- Il valore di FEEDFORWARD deve essere variato con la seguente regola:Foller >0 <0 Verso del
movimentoAvanti Aumentare
FEEDFORWARDRidurre
FEEDFORWARDIndietro Ridurre
FEEDFORWARDAumentare
FEEDFORWARD10 Durante questi movimenti il superamento della soglia da parte dell'errore di inseguimento non crea un allarme della macchina, ma viene semplicemente segnalato tramite il simbolo  . E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.
. E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.Taratura asse Y, Taratura asse Z
Seguire le stesse procedure illustrate per l'asse X.
Salvataggio/Caricamento dati
NOTA : per accedere a questa pagine impostare la password 264.

SAVE Salvataggio dati
Questa funzione permette di salvare i dati ritentivi (setup assi, programmi di lavoro) su un supporto esterno di tipo MMC oppure SD (da inserire nell'apposito slot).

Alla successiva conferma dell'operazione, tramite pressione del tasto SAVE tutti i dati verranno salvati.RECALL Caricamento dati
Questa funzione permette di caricare i dati ritentivi (setup assi, programmi di lavoro) da un supporto esterno di tipo MMC oppure SD (da inserire nell'apposito slot).

Alla successiva conferma dell'operazione, tramite pressione del tasto RECALL tutti i dati verranno caricati sullo strumento.Tarature
Premendo dalla pagina di SETUP uno dei tasti:


il programma propone questa pagina:

La pagina di taratura si suddivide nei seguenti sottomenù:
-
 impostazione della risoluzione dell'asse;
impostazione della risoluzione dell'asse; -
 procedura di taratura asse per la regolazione della retroazione e per impostazione di offset e velocità massima.
procedura di taratura asse per la regolazione della retroazione e per impostazione di offset e velocità massima.

Nome parametro Unità di misura Default Range Descrizione MEASURE mm 0.1 0 ÷ 99999.9 Indica lo spazio, in unità di misura, percorso dal nastro per ottenere gli impulsi encoder impostati sul parametro pulse. PULSE - 1 0 ÷ 999999 Indica gli impulsi moltiplicato 4 forniti dall'encoder del nastro per ottenere lo spazio impostato nel parametro measure.
Il rapporto tra measure e pulse è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935.Procedura 1 Posizionare l'asse più indietro possibile e in modo tale che si riesca a segnare la posizione di partenza. 2 Azzerare il valore ENCODER con il tasto  .
.3 Spostare in jog l'asse nel verso positivo facendogli fare la maggior corsa possibile. 4 Impostare il valore del parametro PULSE con la cifra letta nel parametro ENCODER. 5 
Misurare lo spostamento reale dell'asse dalla quota di partenza segnata fino alla posizione raggiunta ed inserire la misura ottenuta nel parametro MEASURE.
Inserire il valore nell'unità di misura intera che si intende utilizzare in seguito.
Es. Se il valore misurato è di 115,3 mm, si deve inserire il valore 1153 se si desiderano i decimi di mm oppure il valore 11530 se si desiderano i centesimi di mm.
IMPORTANTE: per un corretto funzionamento del posizionatore, prestare attenzione di inserire un valore di MEASURE minore o al massimo uguale al valore di PULSE.
Di seguito forniremo un elenco di operazioni da eseguire per la taratura della controllo di spazio degli assi (PI + FF).
La retroazione di spazio permette di correggere la posizione dell'asse in funzione dell'errore di inseguimento rilevato.
In questa pagina i dati in giallo sono quelli che consentono la parametrizzazione della taratura dell'asse.
Mentre i dati in verde sono dati di servizio che perdono il loro significato quando si esce da questa pagina.Nome parametro Unità di misura Default Range Descrizione OUT TENSIONE V 0.0 -10.0 ÷ 10.0 E' il valore della tensione di uscita, espressa in decimi di volts, inviata direttamente al device. OFFSET V 0.0000 -99.9999 ÷ 99.9999 Valore di tensione che viene sommato all'uscita analogica per compensare l'offset di tensione dell'impianto. VELOCITA mm/' - - E' il valore della velocità istantanea dell'asse. MAX VELOCITA mm/' 5000 0 ÷ 9999999 Velocità dell'asse corrispondente a 10V erogati dall'uscita analogica. POSIZIONE mm - - E' il valore della posizione istantanea dell'asse. DELTA mm 0.0 - Delta di spostamento tra un posizionamento ed un altro. SET VELOCITA mm/' 0 - Velocità di spostamento in posizionamento. TEMPO ACC. s 0.00 - Tempo di accelerazione in posizionamento. TEMPO DEC. s 0.00 - Tempo di decelerazione in posizionamento. FEEDFORWARD % 100.0 0.0 ÷ 200.0 È il coefficiente percentuale che, moltiplicato per la velocità, genera la parte feed-forward dell'uscita di regolazione. PROP. GAIN - 0.000 0.000 ÷ 9.999 È il coefficiente che moltiplicato per l'errore di inseguimento genera la parte proporzionale dell'uscita di regolazione. T INTEGRALE s 0.000 0.000 ÷ 9.999 È il tempo che produce il coefficiente di integrazione dell'errore di inseguimento.
L'integrazione di tale errore moltiplicata per tale coefficiente genera la parte integrale dell'uscita di regolazione.MAX ERR. INSEG. mm 99.9 0.0 ÷ 99999.9 Definisce il massimo scostamento accettabile tra la posizione teorica e la posizione reale dell'asse. ERRORE INSEG. mm - - E' il valore istantaneo dell'errore di inseguimento. Le seguenti operazioni devono essere eseguite una volta che sono stati impostati i seguenti parametri nelle pagine dei parametri dell'asse:
-
RISOLUZIONE: impostare la risoluzione corretta.
-
MASSIMA POSIZIONE: inserire un valore molto grande positivo (Es.: 9999 mm)
-
MINIMA POSIZIONE: inserire un valore molto grande negativo (Es.: - 9999 mm)
Per eseguire una delle tarature descritte, devono essere soddisfatte le seguenti condizioni:
 Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
 Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Impostazione del parametro OFFSET 1 Premere  per attivare la calibrazione.
per attivare la calibrazione.2 Inserire il valore 0 (zero) nel parametro OUT TENSIONE. 3 Agire sul parametro OFFSET (con un inserimento diretto, usando i tasti  ,
,  , oppure attraverso la procedura automatica dal tasto
, oppure attraverso la procedura automatica dal tasto  ) in modo che la POSIZIONE dell'asse non sia variabile (o vari molto lentamente).
) in modo che la POSIZIONE dell'asse non sia variabile (o vari molto lentamente).4 Premere  per disattivare la calibrazione.
per disattivare la calibrazione.Verifica conteggio e senso di rotazione: si deve verificare che ad una tensione in uscita maggiore di 0 (zero) corrisponda una variazione incrementale della posizione dell'asse. 1 Premere per attivare la calibrazione.2 Inserire un valore positivo nel parametro VOUT. 3 Verificare che il valore del parametro POSIZIONE si incrementi. 4 Premere per disattivare la calibrazione: la tensione in uscita VOUT si azzera senza rampa.5 Se il senso di rotazione del motore non è corretto si deve intervenire sul cablaggio invertendo i segnali PHA e PHB.Velocità massima: determinare la velocità di movimento dell'asse che corrisponde ad una tensione di 10V in uscita. 1 Premere per attivare la calibrazione.2 Inserire un valore positivo nel parametro VOUT (Se possibile inserire un valore vicino a 10V). 3 Leggere il valore visualizzato nel parametro VELOCITA. 4 Determinare il valore del parametro MAX VELOCITA con la formula:
$ \text{MAX VELOCITA} = \dfrac{10\cdot \text{VELOCITA}}{\text{VOUT}} $5 Premere per disattivare la calibrazione: la tensione in uscita VOUT si azzera senza rampa.6 Inserire il valore calcolato nella MAX VELOCITA. Parametri per la retroazione di spazio: i parametri interessati sono FEEDFORWARD, PROP. GAIN e T INTEGRALE. Una volta eseguite correttamente le fasi precedenti, continuare con: 1 Inserire il valore 100.0% nel parametro FEEDFORWARD. 2 Inserire il valore minimo (0.001) nel parametro PROP. GAIN. 3 Se il valore ERRORE INSEG. è diverso da 0 (zero), si potrà notare un movimento dell'asse che tende a ridurre tale valore. 4 Inserire ora una valore di spazio nel parametro DELTA e un valore di velocità nel parametro SET VELOCITA (minore del valore di MAX VELOCITA). 5 Premere  per avviare la successione di movimenti dell'asse.
per avviare la successione di movimenti dell'asse.6 L'asse in taratura inizierà un movimento in avanti di uno spazio pari a DELTA ad una velocità SET VELOCITA. 7 Una volta concluso il primo posizionamento ritornerà nella posizione iniziale per poi riprendere il movimento. 8 Durante questi movimenti è possibile controllare il valore di ERRORE INSEG. e agire sui parametri FEEDFORWARD e PROP. GAIN per cercare di mantenerlo a valori più bassi possibile.
I criteri da seguire sono:
-
Aumentare gradualmente il valore di PROP. GAIN finché l'asse non vibra eccessivamente nella fase di arresto. A quel punto ridurre leggermente il valore per avere un comportamento accettabile.
-
Il valore di FEEDFORWARD deve essere variato con la seguente regola:
Errore inseg. >0 <0 Verso del
movimentoAvanti Aumentare
FEEDFORWARDRidurre
FEEDFORWARDIndietro Ridurre
FEEDFORWARDAumentare
FEEDFORWARD9 Durante questi movimenti il superamento della soglia da parte dell'errore di inseguimento non crea un allarme della macchina, ma viene semplicemente segnalato tramite il simbolo  . E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.
. E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.10 Premere  per concludere i posizionamenti.
per concludere i posizionamenti.Caricamento default
Premendo dalla pagina di SETUP uno dei tasti:



il programma propone questa pagina:


Viene caricato il default relativo al menu selezionato 
Ritorno alla pagina di SETUP Diagnostica ingressi e uscite
Premendo il tasto a video di accesso alla sezione di diagnostica delle risorse hardware in ingresso e uscita al sistema. Per il significato di ognuna di queste risorse si deve fare riferimento alla lista completa degli ingressi e uscite.

Da questa schermata è possibile accedere alle varie sezioni di diagnostica presenti:
-
Diagnostica degli ingressi digitali (INPUTS)
-
Diagnostica delle uscite digitali (OUTPUTS)
-
Diagnostica dei conteggi (ENCODERS)
-
Diagnostica delle uscite analogiche (USCITE AN.)
Inoltre sono presenti alcune informazioni riguardanti:
-
Fw name : firmware presente nello strumento e checksum relativo;
-
Task time : tempo medio del ciclo della CPU con indicazioni sul Tempo Massimo e il Tempo Minimo di scansione;
-
CPU time : tempo totale da quando la CPU è nello stato di RUN (hh:mm)
-
Touch screen : rilevazione di tocco sullo schermo
Diagnostica ingressi digitali
Premendo il tasto “INPUTS” si accede alla seguente schermata, ove è visualizzato lo stato di ciascun ingresso digitale.
In basso visualizzato il valore in bit dell'ingresso analogico.

Diagnostica uscite digitali
Premendo il tasto “OUTPUTS” si accede alla seguente schermata, ove è visualizzato lo stato di ciascuna uscita digitale:

Diagnostica dei conteggi
Premendo il tasto “ENCODERS” si accede alla seguente schermata, ove è visualizzato il conteggio di ciascun encoder.
Per ogni asse è visualizzato il conteggio in impulsi encoder e più in piccolo il valore del conteggio in unità di misura.
Diagnostica uscite analogiche
Premendo il tasto “USCITE AN.” si accede alla seguente schermata, ove sono visualizzate le uscite analogiche con il relativo valore espresso in decimi di Volt.

Assistenza
Richiesta di assistenza
Per poterVi fornire un servizio rapido, al minimo costo, abbiamo bisogno del Vostro aiuto.



Seguire tutte le indicazioni fornite nel manuale MIMAT Se il problema persiste, compilare il Modulo per assistenza tecnica allegato a questo manuale ed inviare a QEM. I nostri tecnici otterranno elementi indispensabili per la comprensione del Vostro problema. -
-




