Table of Contents
P1P20FC20 - 001 : Connessioni e Setup
Table of Contents
Informazioni
Release
Il presente documento è valido integralmente salvo errori od omissioni.
| Release | Descrizione | Data |
|---|---|---|
| 1.0 | Nuovo manuale. | 23/05/14 |
Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
-
Microsoft® e MS-DOS® sono marchi registrati e Windows® è un marchio della Microsoft Corporation.
Descrizione
La applicazione P1P20FC20 - 001, installata nell'hardware Qmove J1-P20-FC20, è realizzata per controllare una tavola rotante che deve spostarsi di n divisioni di giro, interfacciandosi tramite I/O a un altro PLC. Di seguito riportiamo le caratteristiche principali del software P1P20FC20 - 001.
Caratteristiche implementate nell'applicazione
-
Gestione programmi
-
Funzionalità touchscreen per introduzioni dati e azioni tramite bottoni
-
Messaggistica di supporto all'operatore
-
Messaggistica di allarme
Hardware e collegamenti
Scheda base
Alimentatore
Lo strumento dovrà essere alimentato a 24Vdc. Non sarà previsto nessun fusibile interno.
Connettività
Saranno previste in “versione standard”, nr. 2 seriali:
-
PORTA PROG → Seriale con standard logico TTL per programmazione.
-
PORTA USER → Seriale multistandard (RS232, RS422, RS485).
-
PORTA CAN → “bus di campo” tipo Canbus.
Nr. 1 Porta MMC per salvataggio/caricamento dati da memoria esterna.
J1-P20-FC20
 |
| Film standard QEM del J1-P20FC20 |
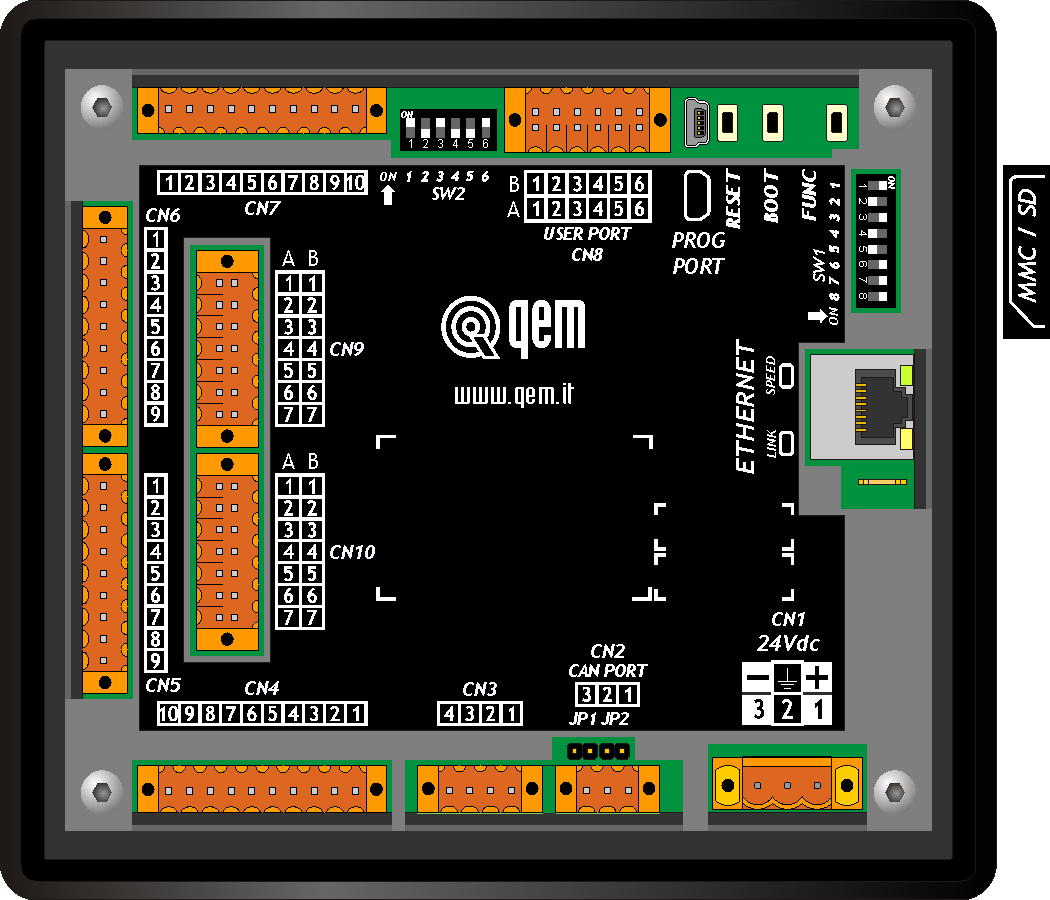 |
| Vista posteriore del J1-P20FC20 |
Lista I/O
In questo capitolo elenchiamo tutti gli I/O utilizzati e divisi per connettore. Per una descrizione più dettagliata di alcuni degli I/O elencati, vedere nei capitoli successivi dove viene descritto ogni singolo connettore.
Ingressi digitali (n. 16)
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| I1 | Emergenza | CN6 | J1P20-FC20 |
| I2 | Jog rotazione avanti | ||
| I3 | Jog rotazione indietro | ||
| I4 | Selettore manuale/automatico | ||
| I5 | Pulsante di Start | ||
| I6 | Pulsante di Stop | ||
| I7 | Avanzamento divisione (da PLC) | ||
| I8 | Impostazione ciclo ½ divisione (da PLC) | ||
| I9 | Drive asse rotazione OK | CN5 | |
| I10 | Sensore di homing | ||
| I11 | Riserva | ||
| I12 | Riserva | ||
| I13 | Riserva | ||
| I14 | Riserva | ||
| I15 | Riserva | ||
| I16 | Riserva |
Uscite digitali (n. 8)
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| O1 | Lampada “Anomalia in corso” | CN7 | J1P20-FC20 |
| O2 | Lampada “Ciclo in corso” | ||
| O3 | Homing eseguito | ||
| O4 | Ok posizione raggiunta (DIVISIONE) | ||
| O5 | Ok posizione raggiunta (TARGET CICLO 1) | ||
| O6 | Ok posizione raggiunta (½ DIVISIONE) | ||
| O7 | Ok posizione raggiunta (TARGET CICLO 2) | ||
| O8 | Riserva | ||
| O9 | Drive in enable | CN4 | |
| O10 | Drive in marcia | ||
| O11 | Drive reset allarmi | ||
| O12 | Riserva | ||
| O13 | Riserva | ||
| O14 | Riserva | ||
| O15 | Riserva | ||
| O16 | Riserva |
Ingressi di conteggio bidirezionali (n° 2)
| Nome | Descrizione | Connettore | Hardware |
|---|---|---|---|
| PHA1 PHB1 | Fasi encoder asse tavola rotante | CN9 | J1P20-FC20 |
| PHZ1 | Fase zero asse tavola rotante | ||
| PHA2 | Riserva | ||
| PHB2 | Riserva | ||
| PHZ2 | Riserva |
Uscite analogiche (n. 2)
| Nome | Descrizione | Connettore | Hardware |
|---|---|---|---|
| AO1 | Asse tavola rotante | CN3 | J1P20-FC20 |
| AO2 | Riserva |
Tasti funzione
| Nome | Descrizione | Hardware |
|---|---|---|
| F1 | Menu | J1P20-FC20 |
| F2 | ||
| F3 | ||
| F4 | ||
| F5 | ||
| F6 | Pagina allarmi | |
| F7 | Pagina precedente |
Connessioni elettriche
CN1- Power supply (Ingresso Alimentazione - 24 Vdc)
  | 1 | | Positivo alimentazione DC |
| 2 | TERRA | Terra-PE (segnali) | |
| 3 | | 0V alimentazione DC |
CN2 - PORTA CAN
 | 1 | CAN H | Terminale CAN H |
| 2 | CAN L | Terminale CAN L | |
| 3 | 0V | Comune CAN |
CN3 - 2 uscite analogiche
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo |
|---|---|---|---|---|
 | 1 | GAO | Comune uscite analogiche | |
| 2 | AO1 | Uscita analogica tavola rotante | 2.AN01 | |
| 3 | AO2 | Riserva | 2.AN02 | |
| 4 | GAO | Comune uscite analogiche |
CN4 - 8 uscite digitali protette
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo |
|---|---|---|---|---|
 | 1 | V+ | Ingresso alimentazione uscite (12÷28V dc) | |
| 2 | O9 | Drive enable | 2.OUT09 | |
| 3 | O10 | Drive in marcia | 2.OUT10 | |
| 4 | O11 | Drive reset allarmi | 2.OUT11 | |
| 5 | O12 | Riserva | 2.OUT12 | |
| 6 | O13 | Riserva | 2.OUT13 | |
| 7 | O14 | Riserva | 2.OUT14 | |
| 8 | O15 | Riserva | 2.OUT15 | |
| 9 | O16 | Riserva | 2.OUT16 | |
| 10 | V- | Ingresso alimentazione uscite (0V dc) |
CN5 - 8 ingressi digitali
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo | |
|---|---|---|---|---|---|
 | 1 | 0V | Comune degli ingressi digitali | ||
| 2 | I9 | Drive ok (ready) (NC) | 2.INP09 | ||
| 3 | I10 | Sensore di zero (NO) | 2.INP10 | ||
| 4 | I11 | Riserva | 2.INP11 | ||
| 5 | I12 | Riserva | 2.INP12 | ||
| 6 | I13 | Riserva | 2.INP13 | ||
| 7 | I14 | Riserva | 2.INP14 | ||
| 8 | I15 | Riserva | 2.INP15 | ||
| 9 | I16 | Riserva | 2.INP16 | ||
CN6 - 8 ingressi digitali
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo | |
|---|---|---|---|---|---|
| | 1 | 0V | Comune degli ingressi digitali | ||
| 2 | I1 | Emergenza (NC) | 2.INP01 | ||
| 3 | I2 | Jog rotazione avanti (NO) | 2.INP02 | ||
| 4 | I3 | Jog rotazione indietro (NO) | 2.INP03 | ||
| 5 | I4 | Selettore manuale(0)/automatico(1) | 2.INP04 | ||
| 6 | I5 | Pulsante di Start (NO) | 2.INP05 | ||
| 7 | I6 | Pulsante di Stop (NO) | 2.INP06 | ||
| 8 | I7 | Avanzamento divisione da PLC (NO) | 2.INP07 | ||
| 9 | I8 | Impostazione ciclo ½ divisione da PLC (NO) | 2.INP08 | ||
CN7 - 8 uscite digitali protette
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo |
|---|---|---|---|---|
| | 1 | V+ | Ingresso alimentazione uscite (12÷28V dc) | |
| 2 | O1 | Lampada “Anomalia in corso” | 2.OUT01 | |
| 3 | O2 | Lampada “Ciclo in corso” | 2.OUT02 | |
| 4 | O3 | Homing eseguito | 2.OUT03 | |
| 5 | O4 | Ok posizione raggiunta (DIVISIONE) | 2.OUT04 | |
| 6 | O5 | Ok posizione raggiunta (TARGET CICLO 1) | 2.OUT05 | |
| 7 | O6 | Ok posizione raggiunta (½ DIVISIONE) | 2.OUT06 | |
| 8 | O7 | Ok posizione raggiunta (TARGET CICLO 2) | 2.OUT07 | |
| 9 | O8 | Riserva | 2.OUT08 | |
| 10 | V- | Ingresso alimentazione uscite (0V dc) |
CN8 - PORTA USER. Seriale RS232-RS422-RS485 (isolata)
Connettore USER PORT
| CN8 | Morsetto | RS232 | RS422 | RS485 | Descrizione |
|---|---|---|---|---|---|
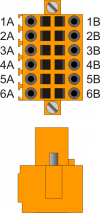 | 1A | - | - | A | Terminale A - RS485 |
| 2A | - | - | B | Terminale B - RS485 | |
| 3A | 0V | 0V | 0V | Comune USER PORT | |
| 4A | 0V | 0V | 0V | Comune USER PORT | |
| 5A | TX | - | - | Terminale TX - RS232 | |
| 6A | Terra | ||||
| 1B | - | RX | - | Terminale RX - RS422 | |
| 2B | - | RXN | - | Terminale RX N - RS422 | |
| 3B | - | TX | - | Terminale TX - RS422 | |
| 4B | - | TXN | - | Terminale TX N - RS422 | |
| 5B | RX | - | - | Terminale RX - RS232 | |
| 6B | Terra | ||||
Settaggio standard elettrico USER PORT

CN9 - 1 ingresso di conteggio bidirezionale a 200KHz
| Connettore | Morsetto | Simbolo | Descrizione | Indirizzo | ||
|---|---|---|---|---|---|---|
 | 1A | Uscita +24V dc1) | ||||
| 2A | PHA1 | Fase A - Encoder tavola rotante | Conteggio 1 PNP Push-Pull2) | 2.INP33 | 3.CNT01 | |
| 3A | PHB1 | Fase B - Encoder tavola rotante | 2.INP34 | |||
| 4A | Z1 | Fase zero tavola rotante | 1.INT01 | |||
| 5A | 0V | Comune degli ingressi di conteggio | ||||
| 6A | 0V | |||||
| 7A | 0V | |||||
| 1B | Uscita +24V dc3) | |||||
| 2B | PHA1+ | + PHA - Encoder tavola rotante | Conteggio 1 Line Driver | 2.INP33 | 2.CNT01 | |
| 3B | PHB1+ | + PHB - Encoder tavola rotante | 2.INP34 | |||
| 4B | Z1+ | + Z - Fase zero tavola rotante | 1.INT01 | |||
| 5B | PHA1- | - PHA - Encoder tavola rotante | ||||
| 6B | PHB1- | - PHB - Encoder tavola rotante | ||||
| 7B | Z1- | - Z - Fase zero tavola rotante | ||||
CN10 - 1 ingresso di conteggio bidirezionale a 200KHz
Tutti i conteggi di questi morsetti sono contrassegnati come Riserva
Setup
Generico
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| PG-01 : PUNTO DECIMALE REALE | - | 3 | 0 ÷ 3 | E' la posizione del punto decimale delle quote dell'asse. |
| PG-02 : PUNTO DECIMALE VISUALIZZATO | - | 3 | 0 ÷ 3 | E' la posizione del punto decimale nelle visualizzazioni delle quote dell'asse. |
| PG-03 : DIMENSIONE CAMPI SETUP | - | 0 | 0 ÷ 1 | 0: CAMPI PICCOLI (20 per pagina) 1: CAMPI GRANDI (5 per pagina) |
| PG-04 : MODALITA' HOMING | - | 0 | 0 ÷ 2 | 0:homing obbligatorio per poter eseguire qualsiasi operazione; 1:homing non obbligatorio, è possibile ignorare la richiesta e continuare ad usare la macchina; 2:homing obbligatorio per i cicli automatici, sono permessi solo i movimenti manuali. |
| PG-05 : TIPO HDR | - | 0 | 0 ÷ 2 | La visualizzazione HDR permette di centrare l'intervallo delle unità sui valori interi. 0: NON ATTIVO 1: ATTIVO NELLA FASCIA CENTRALE 2: ATTIVO |
Tavola rotante
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| PX-01 : MEASURE | ° | 1.000 | 0.000 ÷ 9999.999 | Indica lo spazio, in unità di misura, percorso dall'asse per ottenere gli impulsi encoder * 4 impostati sul parametro pulse. |
| PX-02 : PULSE | - | 4000 | 0 ÷ 999999 | Indica gli impulsi moltiplicato 4 forniti dall'encoder slave per ottenere lo spazio impostato nel parametro measure. Il rapporto tra measure e pulse è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935. |
| PX-03 : TOLLERANZA | ° | 0.050 | 0.000 ÷ 9.999 | Definisce una fascia di conteggio intorno alle quote di posizionamento. Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto. |
| PX-04 : TEMPO DI ABILITAZIONE | s | 0.200 | 0.000 ÷ 9.999 | Tempo di abilitazione prima dell'avvio dello spostamento dell'asse. |
| PX-05 : TEMPO DI DISABILITAZIONE | s | 0.200 | 0.000 ÷ 9.999 | Tempo di disabilitazione dopo la fine dello spostamento dell'asse. |
| PX-06 : QUOTA MASSIMA | ° | 999.999 | -999.999 ÷ 999.999 | Massima quota raggiungibile dall'asse. |
| PX-07 : QUOTA MINIMA | ° | -999.999 | -999.999 ÷ 999.999 | Minima quota raggiungibile dall'asse. |
| PX-08 : QUOTA HOMING | ° | 0.000 | -999.999 ÷ 999.999 | Quota associata all'asse durante la procedura di homing. |
| PX-09 : MODALITA' DI HOMING | - | 1 | 0 ÷ 3 | 0: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione rallentando e, sul fronte di discesa relativo al segnale di camma, carica la quota PX-09. 1: Per la ricerca del sensore di homing, l'asse inizia il movimento in veloce, incontra il sensore, inverte la direzione ed in lento acquisisce il primo impulso di zero (dopo la disattivazione del segnale di camma). 2: Non viene attivata la procedura di homing con movimentazione dell'asse. Il conteggio viene aggiornato alla PX-08 all'attivazione del sensore di homing. 3: l'homing è disabilitato |
| PX-10 : DIREZIONE HOMING | - | 0 | 0 ÷ 1 | 0:avanti; 1:indietro. |
| PX-11 : ABILITAZIONE SEQUENZA HOMING | - | 1 | 0 ÷ 1 | Abilitazione dell'asse durante la sequenza di homing automatica. 0: l'homing per questo asse non viene eseguito durante la sequenza di homing automatica. 1: durante la sequenza di homing automatica verrà eseguito l'homing anche di questo asse. |
| PX-12 : TEMPO DI ACCERAZIONE | s | 0.50 | 0.00 ÷ 9.99 | E' il tempo necessario per passare da velocità 0 a velocità massima. |
| PX-13 : TEMPO DI DECELERAZIONE | s | 0.50 | 0.00 ÷ 9.99 | E' il tempo necessario per passare da velocità massima a velocità 0. |
| PX-14 : TEMPO DI INVERSIONE | s | 0.50 | 0.00 ÷ 9.99 | Viene utilizzato per evitare stress meccanici dovuti a troppo rapide inversioni del senso di movimento. |
| PX-15 : USCITA FRENO | - | 0 | 0 ÷ 1 | Identifica la presenza di una uscita freno dell'asse. L'uscita si attiva prima del movimento dell'asse e si disattiva dopo che questo è terminato, secondo le tempistiche impostate sui parametri PX-04 e PX-05. |
| PX-16 : ATTESA TOLLERANZA | s | 0.50 | 0.00 ÷ 9.99 | Definisce il tempo che intercorre tra l'arrivo dell'asse nella fascia di tolleranza e la relativa segnalazione di stato. |
| PX-17 : VELOCITA' MANUALE AVANTI | °/min | 10 | 0 ÷ 9999999 | Definisce la velocità con la quale l'asse si muove in avanti durante i movimenti manuali. |
| PX-18 : VELOCITA' MANUALE INDIETRO | °/min | 10 | 0 ÷ 9999999 | Definisce la velocità con la quale l'asse si muove in indietro durante i movimenti manuali. |
| PX-19 : VELOCITA' MANUALE LENTA | °/min | 10 | 0 ÷ 9999999 | Definisce la velocità con la quale l'asse si muove in lento durante i movimenti manuali. |
| PX-20 : VELOCITA' AUTOMATICO AVANTI | °/min | 50 | 0 ÷ 9999999 | Definisce la velocità con la quale l'asse si muove in avanti durante il posizionamento in automatico. |
| PX-21 : VELOCITA' AUTOMATICO INDIETRO | °/min | 50 | 0 ÷ 9999999 | Definisce la velocità con la quale l'asse si muove in indietro durante il posizionamento in automatico. |
| PX-22 : VELOCITA' RAPIDO HOMING | °/min | 1 | 0 ÷ 9999999 | E' la velocità di ricerca del sensore di homing. |
| PX-23 : VELOCITA' LENTO HOMING | °/min | 1 | 0 ÷ 9999999 | E' la velocità per il rilascio del sensore di homing. |
| PX-24 : VELOCITA' MASSIMA | °/min | 50 | 0 ÷ 9999999 | Velocità massima dell'asse raggiungibile. |
| PX-25 : FEEDFORWARD | % | 100.0 | 0.0 ÷ 200.0 | È il coefficiente percentuale che, moltiplicato per la velocità, genera la parte feed-forward dell'uscita di regolazione. |
| PX-26 : GUADAGNO PROPORZIONALE | - | 0.000 | 0.000 ÷ 9.999 | È il coefficiente che moltiplicato per l'errore di inseguimento genera la parte proporzionale dell'uscita di regolazione. |
| PX-27 : TEMPO INTEGRALE | s | 0.000 | 0.000 ÷ 9.999 | È il tempo che produce il coefficiente di integrazione dell'errore di inseguimento. L'integrazione di tale errore moltiplicata per tale coefficiente genera la parte integrale dell'uscita di regolazione. |
| PX-28 : TEMPO DERIVATIVO | s | 0.000 | 0.000 ÷ 9.999 | È il tempo che produce il coefficiente derivativo dell'errore di inseguimento. La derivazione di tale errore moltiplicata per tale coefficiente genera la parte derivativa dell'uscita di regolazione. |
| PX-29 : MASSIMO ERRORE DI INSEGUIMENTO | ° | 0.999 | 0.000 ÷ 999.999 | Definisce il massimo scostamento accettabile tra la posizione teorica e la posizione reale dell'asse. |
| PX-30 : OFFSET | V | 0.0000 | -99.9999 ÷ 99.9999 | Valore di tensione che viene sommato all'uscita analogica per compensare l'offset di tensione dell'impianto. |
Assistenza
Per poterti fornire un servizio rapido, al minimo costo, abbiamo bisogno del tuo aiuto.
 |  |
| Segui tutte le istruzioni fornite nel manuale MIMAT | Se il problema persiste, compila il “Modulo richiesta assistenza” nella pagina Contatti del sito www.qem.it. I nostri tecnici otterranno gli elementi essenziali per comprendere il tuo problema. |
Riparazione
Per poterVi fornire un servizio efficente, Vi preghiamo di leggere e attenerVi alle indicazioni qui riportate
Spedizione
Si consiglia di imballare lo strumento con materiali in grado di assorbire eventuali cadute.
 |  |  |
| Utilizzare l'imballo originale: deve proteggere lo strumento durante il trasporto. | Allega: 1. Una descrizione dell'anomalia; 2. Parte dello schema elettrico in cui è inserito lo strumento 3. Programmazione dello strumento (setup, quote di lavoro, parametri…). | Una descrizione approfondita del problema ci consentirà di identificare e risolvere rapidamente il tuo problema. Un accurato imballaggio eviterà ulteriori inconvenienti. |