Indice
QCNC1-Rx


I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM. QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento. QEM® è un marchio registrato.
Informazioni
| |
||||
| Documento: | MDUQCNC1 | |||
|---|---|---|---|---|
| Descrizione: | Manuale di installazione e manutenzione | |||
| Redattore: | Riccardo Furlato | |||
| Approvatore | Giuliano Tognon | |||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/qmoveplus/QCNC1/mimQCNC1fx_base | |||
| Lingua: | Italiano | |||
| Release documento | Release Hardware | Descrizione | Note | Data |
| 00 | 01 | Nuovo manuale | / | 29/02/2016 |
L'apparecchiatura è stata progettata per l'impiego in ambiente industriale in conformità alla direttiva 2004/108/CE.
-
EN 61000-6-4: Compatibilità elettromagnetica - Norma generica sull'emissione in ambiente industriale
-
EN55011 Class A: Limiti e metodi di misura
-
EN 61000-6-2: Compatibilità elettromagnetica - Norma generica sull'immunità negli ambienti industriali
-
EN 61000-4-2: Compatibilità elettromagnetica - Immunità alle scariche elettrostatiche
-
EN 61000-4-3: Immunità ai campi magnetici a radiofrequenza
-
EN 61000-4-4: Transitori veloci
-
EN 61000-4-5: Transitori impulsivi
-
EN 61000-4-6: Disturbi condotti a radiofrequenza
-
Il prodotto risulta inoltre conforme alle seguenti normative:
-
EN 60529: Grado di protezione dell'involucro IP20
-
EN 60068-2-1: Test di resistenza al freddo
-
EN 60068-2-2: Test di resistenza al caldo secco
-
EN 60068-2-14: Test di resistenza al cambio di temperatura
-
EN 60068-2-30: Test di resistenza al caldo umido ciclico
-
EN 60068-2-6: Test di resistenza a vibrazioni sinusoidali
-
EN 60068-2-27: Test di resistenza a vibrazioni shock
-
EN 60068-2-64: Test di resistenza a vibrazioni random
-
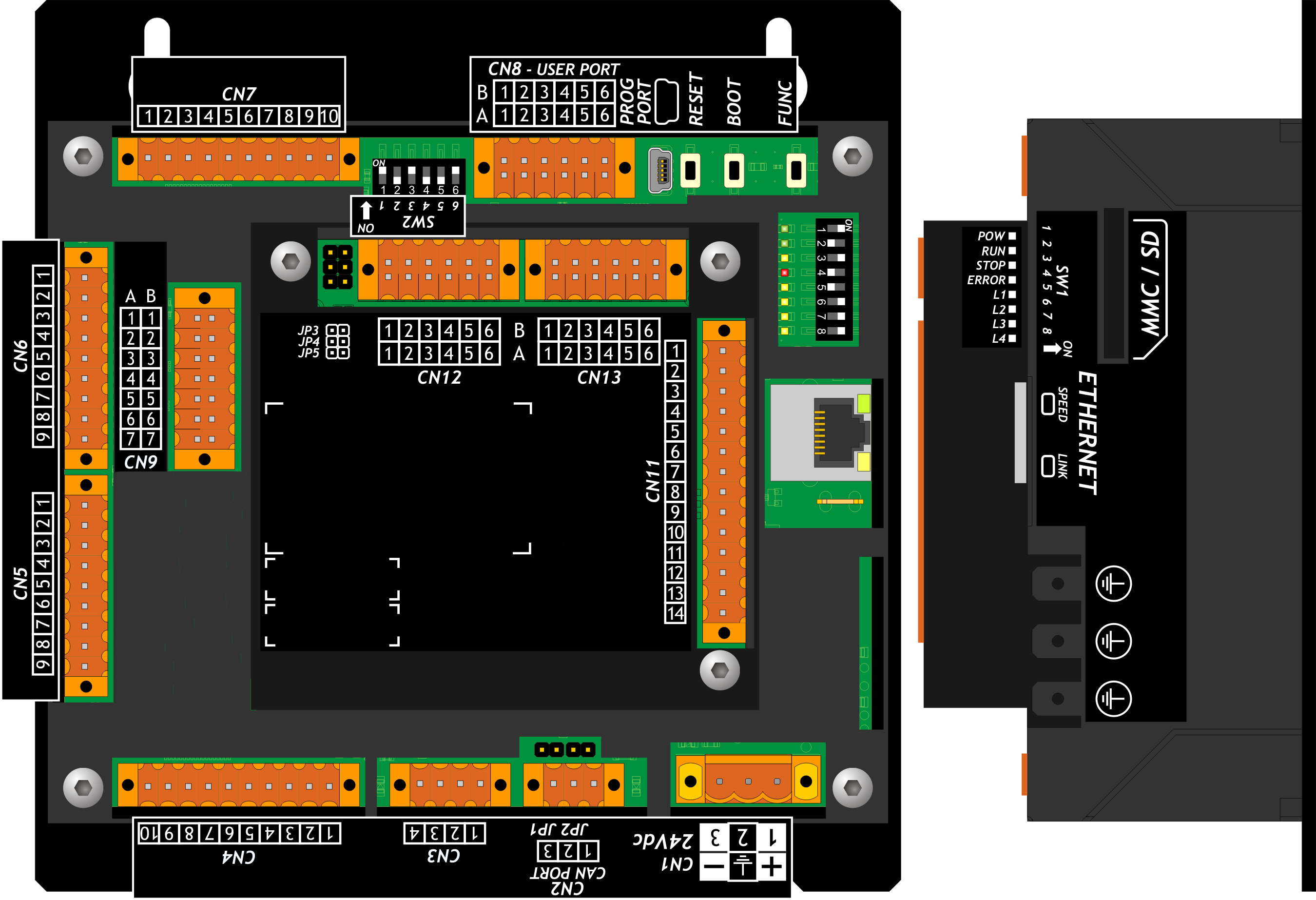
1. Descrizione
QCNC1 è un controllo numerico per macchine basate su motori passo passo o motori brushless. Può raggiungere una frequenza di passo di 300 kHz su 4 assi. Questi assi possono essere mossi in modo interpolato. Un ampio set di comandi permettono di lavorare con diversi tipi di macchina dove ingressi e uscite sono necessari per completare il controllo della macchina. Questo controller è stato disegnato con un microcontrollore RISC da 480 MIPS (200MHz) ottenendo una notevole qualità nella fluidità del movimento degli assi e di interpolazione. La comunicazione con il PC avviene attraverso la porta etherneth. E' previsto il collegamento con un volantino o con ingressi di Jogs.
1.1 Identificazione del prodotto

In base al Codice d'ordinazione dello strumento è possibile ricavarne esattamente le caratteristiche.
Verificare che le Caratteristiche dello strumento corrispondano alle Vostre esigenze.1.1.1 Etichetta prodotto

-
a - Codice di ordinazione
-
b - Settimana di produzione: indica la settimana e l'anno di produzione
-
c - Part number: codice univoco che identifica un codice d'ordinazione
-
d - Serial number: numero di serie dello strumento, unico per ogni pezzo prodotto
-
e - Release hardware: release dell' hardware
1.1.2 Codice di ordinazione
Modello Caratteristiche 
QCNC1 - R01 / A Versione hardware:
A = 3 assi
B = 4 assi
Z = 4 assi + porte di comunicazioneR01 = Non programmabile
R02 = Programmabile1.1.3 Versioni hardware
Attualmente sono disponibili le seguenti versioni hardware:
Risorse Versioni hardware A B Z USER PORT (RS232-422-485) - - 1 CAN PORT - - 1 MMC/SD PORT 1 1 1 ETHERNET PORT 1 1 1 Ingressi digitali 12÷24Vdc 16 16 16 Ingressi digitali 5÷24Vdc 8 8 8 Conteggi bidirezionali 200KHz (24V-PP, 5V-LD) 1 1 1 Conteggio bidirezionale 15Khz (5V-PNP-PP) 1 1 1 Uscite digitali protette 8 8 16 Uscite analogiche +/-10V-16bit 2 2 2 Uscite STEP/DIR 3 4 4 2. Caratteristiche tecniche
2.1 Caratteristiche generali
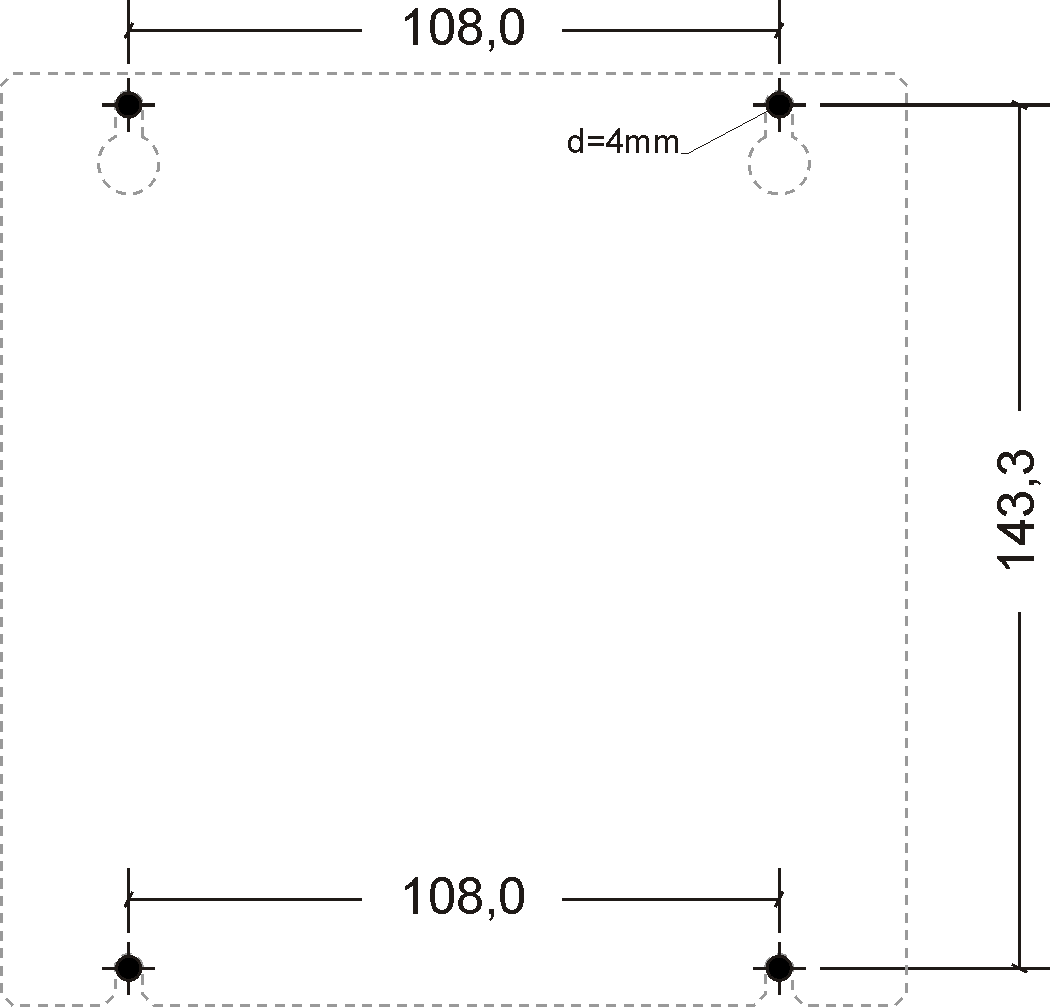
Peso (massima configurazione hardware) 500g Materiale contenitore Lamiera Led sistema 4 Led utente 4 Tasti sistema 3 Temperatura di esercizio 0 ÷ 50°C Umidità relativa 90% senza condensa Altitudine 0 - 2000m s.l.m. Temperatura di trasporto e stoccaggio -25 ÷ +70 °C Grado di protezione IP IP20 2.2 Dimensioni meccaniche

Quote in mm 
2.3 Dima di foratura

3. Collegamenti
Per informazioni riguardanti le sezioni dei cavi utilizabili ed i connettori usati, consultare l'application note AN021 
3.1 Power supply
Il cablaggio deve essere eseguito da personale specializzato e dotato degli opportuni provvedimenti antistatici.
Prima di maneggiare lo strumento, togliere tensione e tutte le parti ad esso collegate.
Per garantire il rispetto delle normative CE, la tensione d'alimentazione deve avere un isolamento galvanico di almeno 1500 Vac.Alimentazioni disponibili 24 Vdc Range valido 22 ÷ 27 Vdc Assorbimento max. 10W Connettore
CN1 Morsetto Simbolo Descrizione 

1 
Positivo alimentazione 2 TERRA Terra-PE (segnali) 3 
0V alimentazione Esempi di collegamento
Si prescrive l'uso di un alimentatore isolato con uscita 24Vdc +/-5% conforme a EN60950-1.
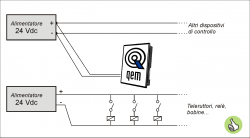
Usare due alimentatori separati: uno per la parte di controllo e uno per la parte di potenza 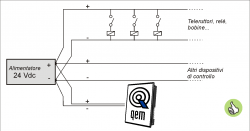
Nel caso di un unico alimentatore, usare due linee separate: una per il controllo e una per la potenza 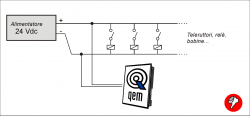
Non usare le stesse linee della parte di potenza 3.2 Collegamenti seriali
3.2.1 PROG PORT (USB mini-B)
3.2.2 USER PORT
Connettore
CN8 Morsetto RS232 RS422 RS485 Descrizione 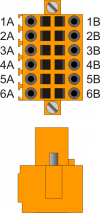
1A - - A Terminale A - RS485 2A - - B Terminale B - RS485 3A 0V 0V 0V Comune USER PORT 4A 0V 0V 0V Comune USER PORT 5A TX - - Terminale TX - RS232 6A Terra 1B - RX - Terminale RX - RS422 2B - RXN - Terminale RX N - RS422 3B - TX - Terminale TX - RS422 4B - TXN - Terminale TX N - RS422 5B RX - - Terminale RX - RS232 6B Terra Settaggio standard elettrico
3.2.3 CANbus PORT
Connettore
CN2 Morsetto Simbolo Descrizione 
1 CAN H Terminale CAN H 2 CAN L Terminale CAN L 3 0V Comune CAN Settaggio resistenze di terminazione
Nome
jumperImpostazione Funzione JP1 JP2

JP1 INSERITO Terminazione CAN attivata JP2 3.2.4 ETHERNET port
ETHERNET PORT Descrizione 
Connettore RJ45.
LED:
* LINK: led verde = cavo collegato (il led acceso indica che il cavo è connesso ad entrambi i capi)
* DATA: led giallo = scambio dati (il led lampeggiante indica lo scambio dati tra i dispositivi collegati)3.2.5 MMC/SD
 Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
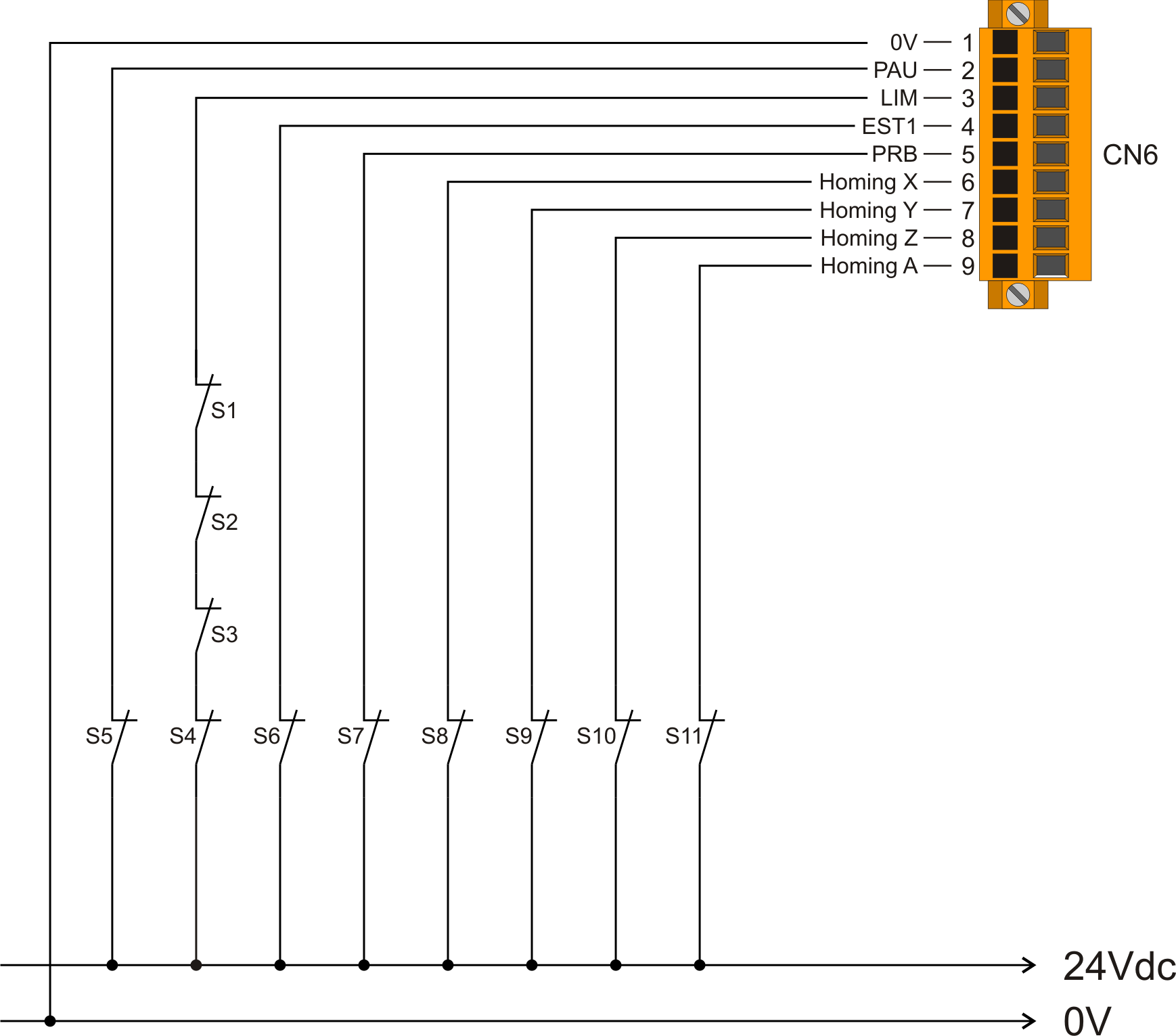
3.3 Ingressi digitali
3.3.1 16 ingressi digitali PNP
CN6 Morsetto Simbolo Descrizione 
1 0V Comune degli ingressi digitali 2 I1 PAU 3 I2 LIM 4 I3 EST1 (stop emergenza) 5 I4 PRB 6 I5 Homing X 7 I6 Homing Y 8 I7 Homing Z 9 I8 Homing A .
CN5 Morsetto Simbolo Descrizione 1 0V Comune degli ingressi digitali 2 I9 User Input 1 3 I10 User Input 2 4 I11 User Input 3 5 I12 User Input 4 6 I13 User Input 5 7 I14 User Input 6 8 I15 User Input 7 9 I16 User Input 8 3.3.2 8 ingressi digitali e 1 conteggio AB
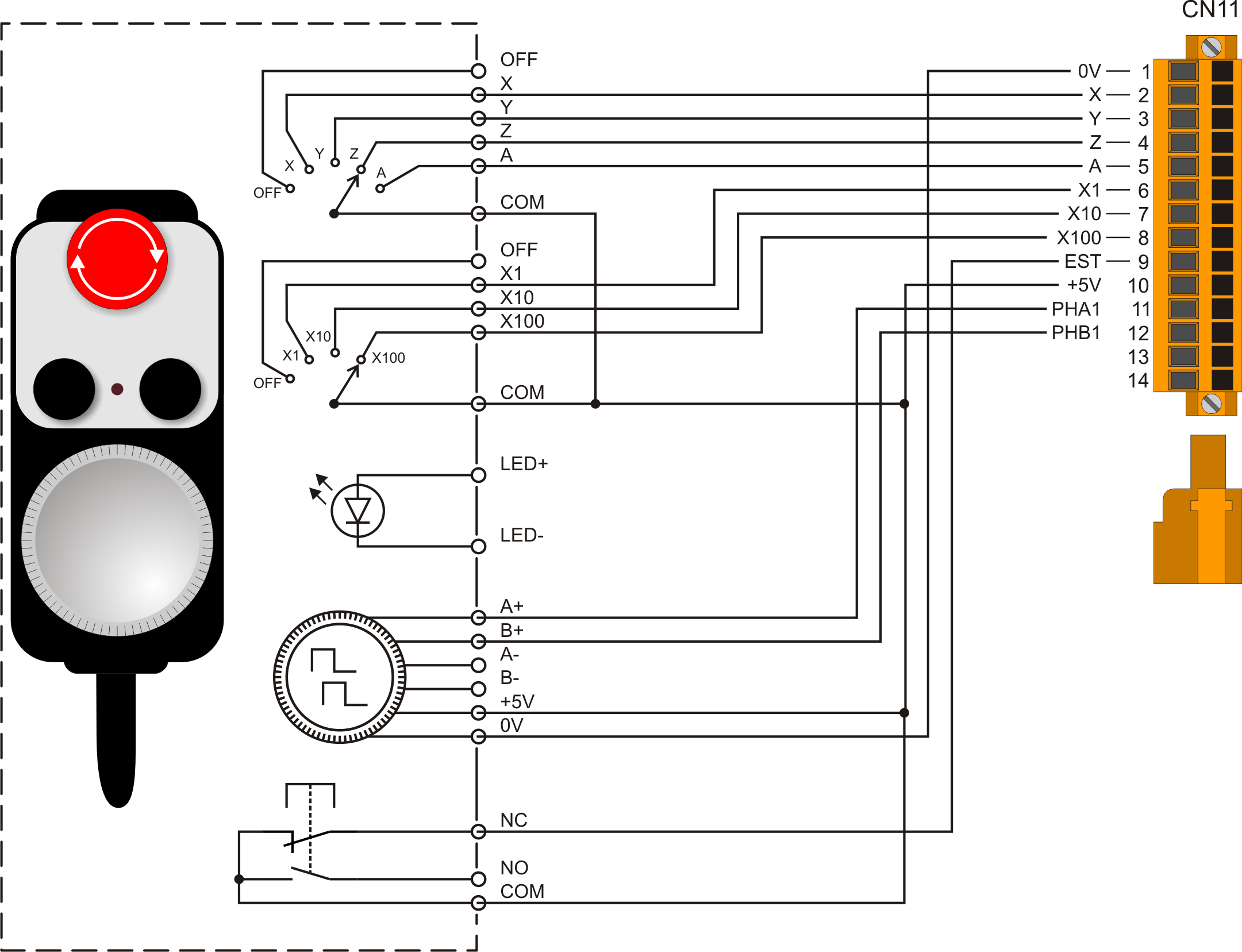
CN11 Morsetto Simbolo Descrizione Con volantino Senza volantino 
1 0V Comune degli ingressi digitali 2 I1 Selezione asse X JOG X+ 3 I2 Selezione asse Y JOG X- 4 I3 Selezione asse Z JOG Y+ 5 I4 Selezione asse A JOG Y- 6 I5 Moltiplicatore x1 JOG Z+ 7 I6 Moltiplicatore x10 JOG Z- 8 I7 Moltiplicatore x100 JOG Z ⇒ JOG A 9 I8 EST2 (stop emergenza) 10 +5V 5 Volts DC output 1) 11 PHA1/I9 Fase A encoder JOG Z ⇒ JOG B 12 PHB1/I10 Fase B encoder JOG rapidi 13 Internal bridge 13 -14 14
1) Corrente massima erogabile 50mA3.3.3 2 ingressi di conteggio bidirezionale a 200KHz
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamento.
CN9 Morsetto Simbolo Descrizione 
1A Uscita +24V dc1) Override 2A PHA1 Fase A Conteggio 1
PNP / Push-Pull2)3A PHB1 Fase B 4A Z1 Z 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Uscita +24V dc3) 2B PHA1+ + PHA Conteggio 1
Line Driver3B PHB1+ + PHB 4B Z1+ + Z 5B PHA1- - PHA 6B PHB1- - PHB 7B Z1- - Z
1), 3) Utilizzabile per alimentare l'encoder. Vedere gli Esempi di collegamento. Corrente massima erogabile 200mA.2) Configurazione conteggio di tipo PNP/Push-Pull:
Morsetto 5B: collegare al morsetto 5A
Morsetto 6B: collegare al morsetto 6A
Morsetto 7B: collegare al morsetto 7A3.4 Uscite digitali
3.4.1 16 uscite protette
CN7 Morsetto Simbolo Descrizione 
1 V+ Ingresso alimentazione uscite (12÷28V dc) 2 O1 User Output 1 3 O2 User Output 2 4 O3 User Output 3 5 O4 User Output 4 6 O5 User Output 5 7 O6 User Output 6 8 O7 User Output 7 9 O8 User Output 8 10 V- Ingresso alimentazione uscite (0V dc) .
CN4 Morsetto Simbolo Descrizione 1 V+ Ingresso alimentazione uscite (12÷28V dc) 2 O9 User Output 9 3 O10 User Output 10 4 O11 User Output 11 5 O12 User Output 12 6 O13 User Output 13 7 O14 User Output 14 8 O15 User Output 15 9 O16 User Output 16 10 V- Ingresso alimentazione uscite (0V dc) 3.4.2 4 uscite STEP-DIREZIONE
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamento.
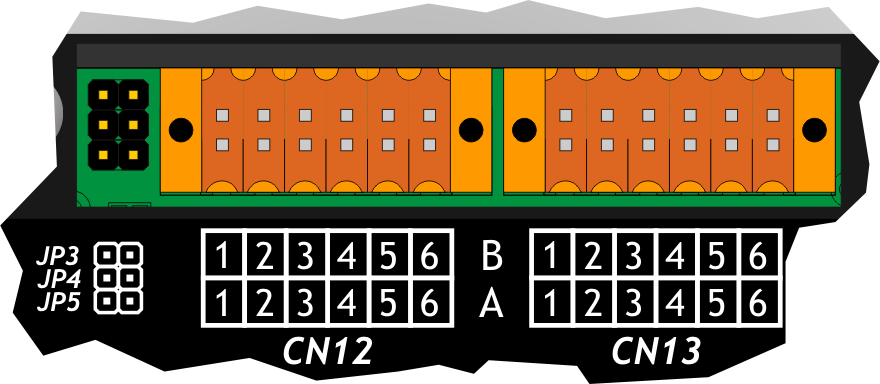
CN12 Morsetto Simbolo Descrizione 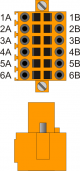
1A VD1 Internal bridge 1A -1B 2A DIR1+ Uscita DIREZIONE X Push-Pull Line Driver 3A STEP1+ Uscita STEP X 4A DIR2+ Uscita DIREZIONE Y 5A STEP2+ Uscita STEP Y 6A 0V Comune delle uscite stepper 1B VD1 Internal bridge 1A -1B 2B DIR1- Uscita complementare DIREZIONE X Uscite complementari per l'utilizzo
nei drive con ingressi Line-Driver3B STEP1- Uscita complementare STEP X 4B DIR2- Uscita complementare DIREZIONE Y 5B STEP2- Uscita complementare STEP Y 6B 0V Comune delle uscite stepper .
CN13 Morsetto Simbolo Descrizione 1A VD1 Internal bridge 1A -1B 2A DIR3+ Uscita DIREZIONE Z Push-Pull Line Driver 3A STEP3+ Uscita STEP Z 4A DIR4+ Uscita DIREZIONE A 5A STEP4+ Uscita STEP A 6A 0V Comune delle uscite stepper 1B VD1 n.c. 2B DIR3- Uscita complementare DIREZIONE Z Uscite complementari per l'utilizzo
nei drive con ingressi Line-Driver3B STEP3- Uscita complementare STEP Z 4B DIR4- Uscita complementare DIREZIONE A 5B STEP4- Uscita complementare STEP A 6B 0V Comune delle uscite stepper Settaggio tensione uscite STEP-DIREZIONE
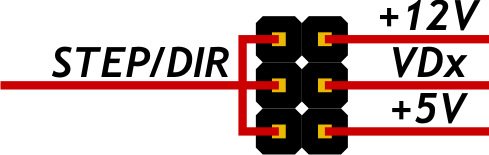
Inserendo uno dei vari ponticelli JP3, JP4 o JP5, è possibile scegliere la Tensione di funzionamento nominale delle uscite STEP e DIR.

Deve essere inserito un solo ponticello alla volta
Se viene selezionata una delle due tensioni 5V(JP5) o 12V(JP3) i morsetti 1A e 1B devono rimanere scollegati.
Nome
jumperImpostazione Tensione nominale 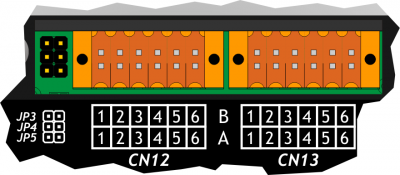
JP3 INSERITO 12V (Tensione erogata dallo strumento) JP4 INSERITO VD1 (Tensione che deve essere fornita ai morsetti 1A o 1B) JP5 INSERITO 5V (Tensione erogata dallo strumento) .

JP3 JP4 JP5 3.5 Uscite analogiche
3.5.1 2 uscite analogiche +/-10V, 16bit
CN3 Morsetto Simbolo Descrizione 
1 GAO Comune uscite analogiche 2 AO1 Velocità mandrino 3 AO2 Non utilizzata 4 GAO Comune uscite analogiche 4. Esempi di collegamento
4.1 Ingressi digitali

S1 Limite X S2 Limite Y S3 Limite Z S4 Limite A S5 PAU S6 EST1 S7 PRB S8 Home X S9 Home Y S10 Home Z S11 Home A 4.2 Ingresso encoder per override
4.2.1 Collegamento di un trasduttore Line Driver

4.2.2 Collegamento di un trasduttore PNP / Push Pull

4.2.3 Collegamento di un digital contacting encoder

Esempio che utilizza un digital contacting encoder Bourns® cod.ECW1J-B24-BC0024L
4.3 Collegamento del volantino
4.3.1 Collegamento di un volantino generico

4.4 Uscite digitali protette

4.5 Uscite STEP - DIREZIONE
4.5.1 Assi X e Y Push-Pull

Il livello di tensione delle uscite è selezionabile tramite i ponticelli JP3, JP4 e JP5 4.5.2 Assi A e Z Line-Driver

Il livello di tensione delle uscite è selezionabile tramite i ponticelli JP3, JP4 e JP5 4.6 Uscite analogiche

5. Caratteristiche elettriche
Di seguito sono riportate le caratteristiche elettriche hardware.
5.1 RS232
Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Riferito a 0V Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 15 m Impedenza d'ingresso > 3 Kohm Limite corrente cortocircuito 7 mA 

5.2 RS422
Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 


5.3 RS485
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio standard elettrico USER PORT, Settaggio standard elettrico AUX1 PORT o Settaggio resistenze di polarizzazione e terminazione AUX2 PORT
.
Velocità di comunicazione 4800 baud (solo se utilizzata con device SERCOM e/o MODBUS),
9600 baud, 19200 baud, 38400 baud, 57600 baudModalità di comunicazione Half duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 32 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 

5.4 CAN BUS
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio resistenze di terminazione
.
Velocità di comunicazione 125, 250, 500, 1000 Kbit/s Max. numero Driver/Receiver sulla linea 100 Max. lunghezza cavi 500m @ 125Kbit/s, 250m @ 250Kbit/s, 100m @ 500Kbit/s, 25m @ 1000Kbit/s Impedenza d'ingresso >15Kohm Limite corrente cortocircuito 45mA 


Esempio di collegamento CAN BUS.
Attenzione: chiudere i DIP JP1 e JP2 ed inserire le resistenze di terminazione (RL, RH) sull'ultimo dispositivo della catena.
5.5 ETHERNET
Interfaccia Ethernet 10/100 Base T (IEEE 802.3) su connettore RJ45.
Collegamento tra Qmove+ e PC:

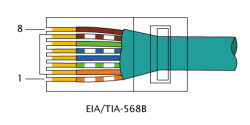
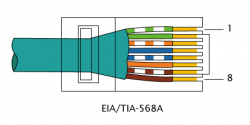


QCNC1 Cavo cross-over EIA/TIA-568A/B PC 5.6 MMC/SD
Tipo Memory Card da utilizzare MMC, SD e SDHC fino a 8GB
Per un corretto funzionamento è necessario che il dispositivo sia conforme agli standard definiti da “SD Association” (www.sdcard.org) oppure da “Multi Media Card Association” (www.mmca.org).Per essere utilizzate le Memory Card devono essere preventivamente formattate con file system FAT16 o FAT32.
5.7 Ingressi digitali su CN5 e CN6
Tipo Sinking (PNP) Tempo min. di acquisizione (hardware) 3ms Tensione di funzionamento nominale 12÷24Vdc Tensione stato logico 0 0÷2 V Tensione stato logico 1 10,5 ÷ 26,5 V Corrente assorbita 2mA@10.5V / 8mA@26.5V 
5.8 Ingressi digitali a range esteso su CN11
Tipo di polarizzazione PNP Tempo min. di acquisizione (hardware) 1ms Isolamento 1000Vrms Tensione di funzionamento nominale 5÷24Vdc Tensione massima applicabile 26Vdc Tensione stato logico 0 < 1.8V Tensione stato logico 1 > 4.5V Caduta di tensione interna 5V Resistenza di ingresso (Ri) 11200O Corrente massima assorbita 17mA @ 24V Corrente massima erogabile da +5V 50mA 5.9 Conteggio bidirezionale su CN11
I valori riportati in tabella si riferiscono ai segnali d'ingresso A, B e Z.
Il valore di frequenza massima, riportato in tabella si riferisce a dei segnali delle fasi A e B con un DutyCycle = 50%
Con frequenze di conteggio superiori ai 50KHz è preferibile l'uso di encoder di tipo Line-Driver..
Tipo di polarizzazione PNP/PP Frequenza massima 15KHz Tempo min. di acquisizione Isolamento 1000Vrms Tensione di funzionamento nominale 5Vdc Tensione stato logico 0 Tensione stato logico 1 Caduta di tensione interna 1.2V Resistenza di ingresso 1200O 5.10 Ingressi di conteggio bidirezionale su CN9
I valori riportati in tabella si riferiscono ai segnali d'ingresso A, B e Z.
Il valore di frequenza massima, riportato in tabella si riferisce a dei segnali delle fasi A e B con un DutyCycle = 50%
Con frequenze di conteggio superiori ai 50KHz è preferibile l'uso di encoder di tipo Line-Driver.Tipo di polarizzazione PNP/PP Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale 24Vdc Tensione stato logico 0 0 ÷ 2 V Tensione stato logico 1 10,5 ÷ 26,5 V Caduta di tensione interna 1,2V Resistenza di ingresso 3000Ω Line-Driver
Tipo di polarizzazione Line-Driver Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale (PHx+ ⇔ PHx-) 5Vdc Tensione stato logico 0 (PHx+ ⇔ PHx-) 0÷1,5 V Tensione stato logico 1 (PHx+ ⇔ PHx-) 2÷5 V Caduta di tensione interna 1,2V Resistenza di ingresso 150Ω 
5.11 Uscite digitali protette su CN4 e CN7
Tipo Sourcing (PNP) Max. tensione di funzionamento 28V Caduta di tensione interna max. 600mV Corrente massima 500mA Tempo di massimo commutazione da ON a OFF 270µs Tempo di massimo commutazione da OFF a ON 250µs 
5.12 Uscite STEP-DIR su CN12 e CN13
Tipo di polarizzazione Push-Pull / Line-Driver Massima frequenza d'uscita 300KHz Isolamento 1000Vpp Corrente max. di funzionamento 20mA Tensione nominale Selezionabile con JP3-JP4-JP5 
5.13 Uscite analogiche
Tipo di collegamento In modo comune Isolamento 1000Vrms Range di tensione (minimo a vuoto) -9,8V ÷ +9,8V Max. variazione offset in funzione della temperatura +/- 5mV Risoluzione 16bit Corrente massima 1mA Variazione dell'uscita in funzione del carico 100 µV/mA Resistenza d'uscita 249Ω 
6. Accessori disponibili
IQ011 Prolunga per interfaccia MMC/SD
-
-