Indice
~~BOZZA~~
R100C

1. Information
| |
|||
| Document: | MIMR100C | ||
|---|---|---|---|
| Description: | Installation and Maintenance Manual | ||
| Drawn up: | Riccardo Furlato | ||
| Approved | Gabriele Bazzi | ||
| Link: | http://www.qem.eu/doku/doku.php/en/strumenti/microqmove/r100c/mimr100cfx | ||
| Language: | English | ||
| Release | Description | Notes | Date |
| 01 | New manual | Valid: hardware release “01.1” software release “10.0.2” | 26/06/2014 |
The controller has been designed for industral environments in conformity to EC directive 2004/108/CE.
-
EN 61000-6-4: Electromagnetic compatibility - Generic standard on emission for industrial environments
-
EN55011 Class A: Limits and measurement methods
-
EN 61000-6-2: Electromagnetic compatibility - Generic standard on immunity for industrial environments
-
EN 61000-4-2: Electromagnetic compatibility - Electrostatic discharge immunity
-
EN 61000-4-3: Immunity to radiated, radio-frequency electromagnetic field
-
EN 61000-4-4: Electrical fast transients
-
EN 61000-4-5: Surge immunity
-
EN 61000-4-6: Conducted disturbance induced by radio-frequency
-
Moreover the product is conform to the following standards:
-
EN 60529: Housing protection rating IP64
-
EN 60068-2-1: Environmental testing: Cold
-
EN 60068-2-2: Environmental testing: Dry heat
-
EN 60068-2-14: Environmental testing: Change of temperature
-
EN 60068-2-30: Environmental testing: Cyclic damp heat
-
EN 60068-2-6: Environmental testing: Sinusoidal vibration
-
EN 60068-2-27: Environmental testing: Shock vibration
-
EN 60068-2-64: Environmental testing: Random vibration
-
2. Description:
R100C is a product of the MicroQmove series that, in its maximum configuration, can be equipped with:
Standard 
1 serial programming PROG PORT (Only with IQ009) 
1 multistandard serial port (RS232/422/485) - USER PORT 
1 MMC/SD card slot 
1 CANbus port 
8 system led's 5 user led's 
2 user key 
1 user display 
Anti-vibration spring cage terminals 
Clock calender 
1 USB PORT (Host)  |
| {{Icone:Icona_analog-in.png?nolink&50")
4 analog input 
2 two-way counts 
16 digital output 
4 Output DC Motor Control 2.1 Product identification
The Ordering Code provides the exact product characteristics. Make sure that the product characteristics meet your requirements.
2.2 Product label

-
a - Codice di ordinazione
-
b - Settimana di produzione: indica la settimana e l'anno di produzione
-
c - Part number: codice univoco che identifica un codice d'ordinazione
-
d - Serial number: numero di serie dello strumento, unico per ogni pezzo prodotto
-
e - Release hardware: release dell' hardware
2.3 Ordering code
Model Caratteristiche R100CF 10 E1 / Q13 / 24V Power supply voltage
24V = 24Vdc (+/-15%)Q13
base card option = nr.1 User serial port , nr.1 CanOpen port, 1 USB port, nr.16 input (24V - PNP), nr.16 output (24V - PNP - max 2A), nr.4 analog input (12bit), nr. 4 Output DC Motor Control, nr.2 countsExpansion card:
E1 = B5-Q10Firmware version:
10 = PLC / CounterHardware version:
R100C = “microQmove” serie's
F = fully programmable2.3.1 Firmware version
Version Description 10 Fully programmable, with PLC/Counter functions For more information about the firmware's characteristics, refer to the table Devices abilitati negli strumenti.
2.3.2 Base card's options
Q11 OPTION 1 CANbus port 1 USB Host port 12 digital output PNP 2A 
4 analog input (12bit) 4 Output DC Motor Control .
Q12 OPTION 1 CANbus port 1 USB Host port 16 digital output PNP 2A 4 analog input (12bit) 2 two-way counts 24V-PNP 4 Output DC Motor Control Q13 OPTION 1 multistandard port (RS232-RS422-RS485) - USER PORT 1 CANbus port 1 USB Host port 16 digital output PNP 2A 4 analog input (12bit) 2 two-way counts 24V-PNP 4 Output DC Motor Control 2.4 Product configuration
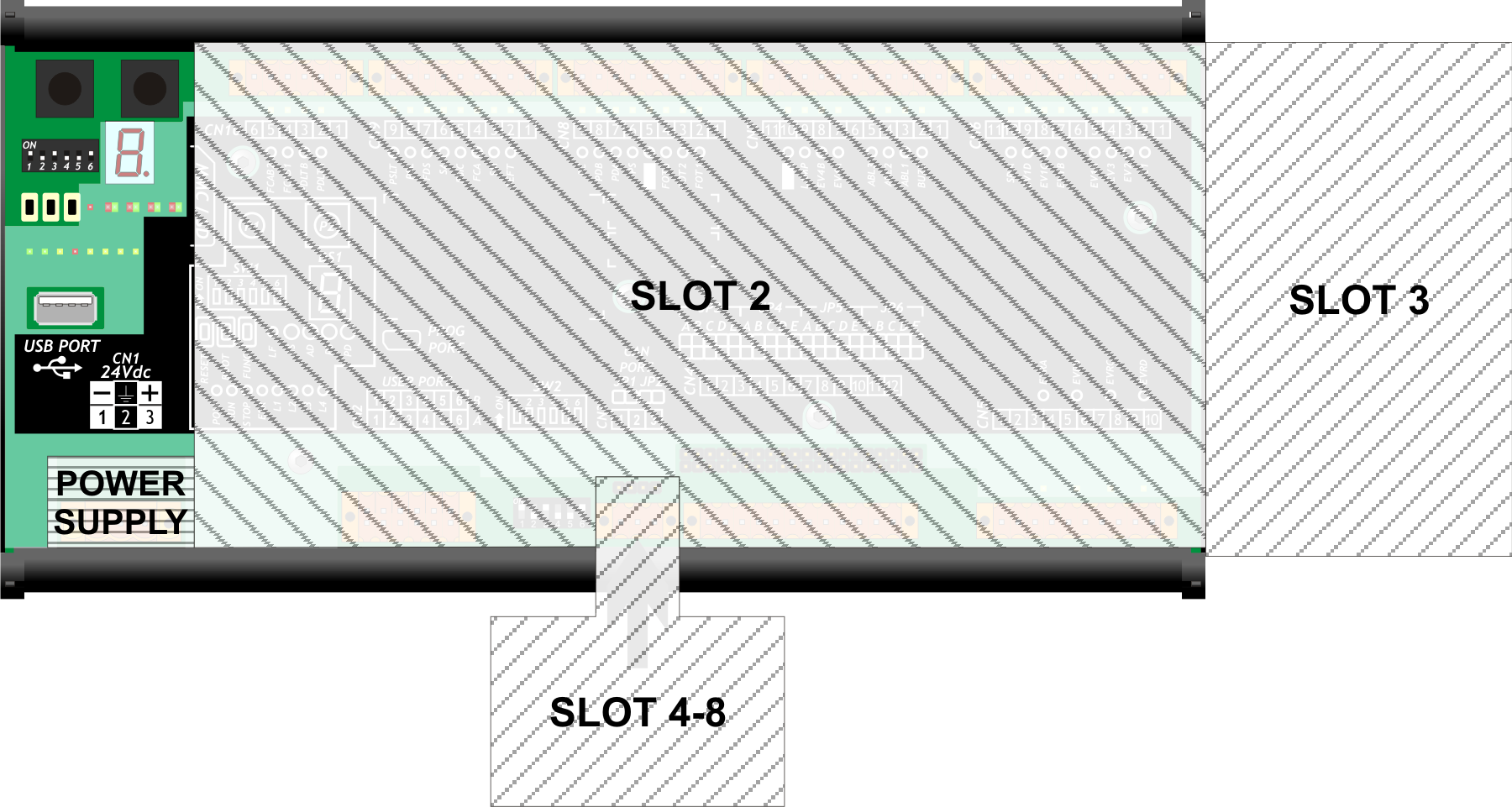
The R100C has a base board which integrates all the features necessary for the operation of microqmove.

Slot Description Power Supply Power supply connector on the base card Slot 2 Base board (B5-Q10) Slot 3 Expansion card (not avaiable) Slot 4-8 Remote CANBUS module slots 3. Specifications
3.1 General Characteristics
Weight (maximum hardware configuration) 500g Box material PVC Led utente 5 Led sistema 8 Tasti funzione 2 Tasti sistema 3 Temperatura di esercizio 0 ÷ 50°C Umidità relativa 90% senza condensa Altitudine 0 - 2000m s.l.m. Temperatura di trasporto e stoccaggio -25 ÷ +70 °C 3.2 CPU (livello tecnologico Microqmove C)
Microprocessore RISC (32 bit) Frequenza di lavoro 200MHz Memoria RAM 2MB Memoria Flash 8MB Memoria Ritentiva 13KB Per maggiori informazioni sull'utilizzo della memoria consultare le Memorie utilizzate
3.3 Dimensioni meccaniche
Quote in mm.


• Leggere attentamente.
• Vedi note tecniche riguardanti i morsetti Weidmuller BLZF, BLZ e B2L.Famiglia Sezione filo
senza puntaliniSezione filo
con puntaliniCaratteristiche
contatto
BLZF 3.50 0,3÷1,50 mm2 0,3÷1 mm2 

B2L 3.50 0,3÷1,00 mm2 0,3÷0,5 mm2 
B2CF 3.50 0,14÷1,50 mm2 0,14÷1,50 mm2 
BLZF 5.08 0,3÷2,50 mm2 0,3÷2,00 mm2 
BLF 5.00 0,2÷2,50 mm2 0,3÷2,00 mm2 
BLZ 5.00 0,2÷2,50 mm2 0,1÷1 mm2 

Per un cablaggio più sicuro, si consiglia l'uso di puntalini Utensili
Puntalini
Sezione filo Sezione puntalino Marca Modello 0,1÷0,3 mm2 0,95 mm2 Cembre PKE 308 0,3÷0,5 mm2 1,32 mm2 Cembre PKE 508 BM BM00601 1 mm2 2,5mm2 BM00603 PK 108 BM BM00603 Pinza per il crimpaggio dei puntalini
Modello: “Cembre ND#4 cod. 2590086”
Cacciaviti
Cacciavite per morsetti a molla autobloccante:
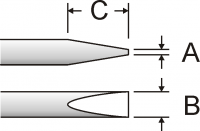
Cacciavite a lama piatta secondo DIN 5264-A.
A = 0,6mm
B = 2,5mm max
C = 7 mm minCacciavite per morsetti a vite
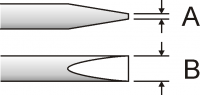
Cacciavite a lama piatta secondo DIN 5264. Coppia di serraggio: 0,4 ÷ 0,5 Nm.
A = 0,6mm
B = 3,5mmProcedura
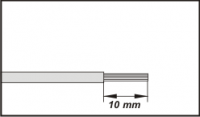
Scoprire il rame del filo per 10mm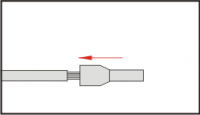
Inserire il puntalino e stringerlo con l'apposita pinza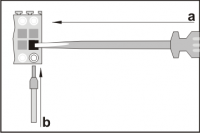
a) inserire il cacciavite senza ruotarlo
b) inserire il puntalino nel morsetto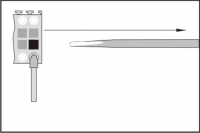
Estrarre il cacciavite4. Caratteristiche elettriche e collegamenti
4.1 Power supply

-
Il cablaggio deve essere eseguito da personale specializzato e dotato degli opportuni provvedimenti antistatici.
-
Prima di maneggiare lo strumento, togliere tensione e tutte le parti ad esso collegate.
-
Per garantire il rispetto delle normative CE, la tensione d'alimentazione deve avere un isolamento galvanico di almeno 1500 Vac.
Alimentazioni disponibili 24 Vdc Range valido 22 ÷ 27 Vdc Assorbimento max. 30W Connettore
CN1 Morsetto Simbolo Description 
1 
0V alimentazione DC 2 GROUND Terra-PE (segnali) 3 
+24V positivo alimentazione DC 4.1.1 Wiring example
4.1.1.1 Esempi di collegamento per l'alimentazione a 24Vdc
Si prescrive l'uso di un alimentatore isolato con uscita 24Vdc +/-5% conforme a EN60950-1.
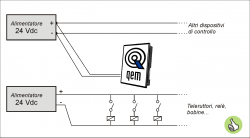
Usare due alimentatori separati: uno per la parte di controllo e uno per la parte di potenza
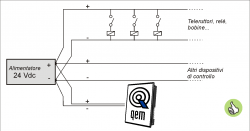
Nel caso di un unico alimentatore, usare due linee separate: una per il controllo e una per la potenza
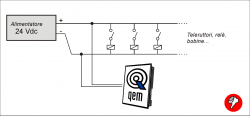
Non usare le stesse linee della parte di potenza
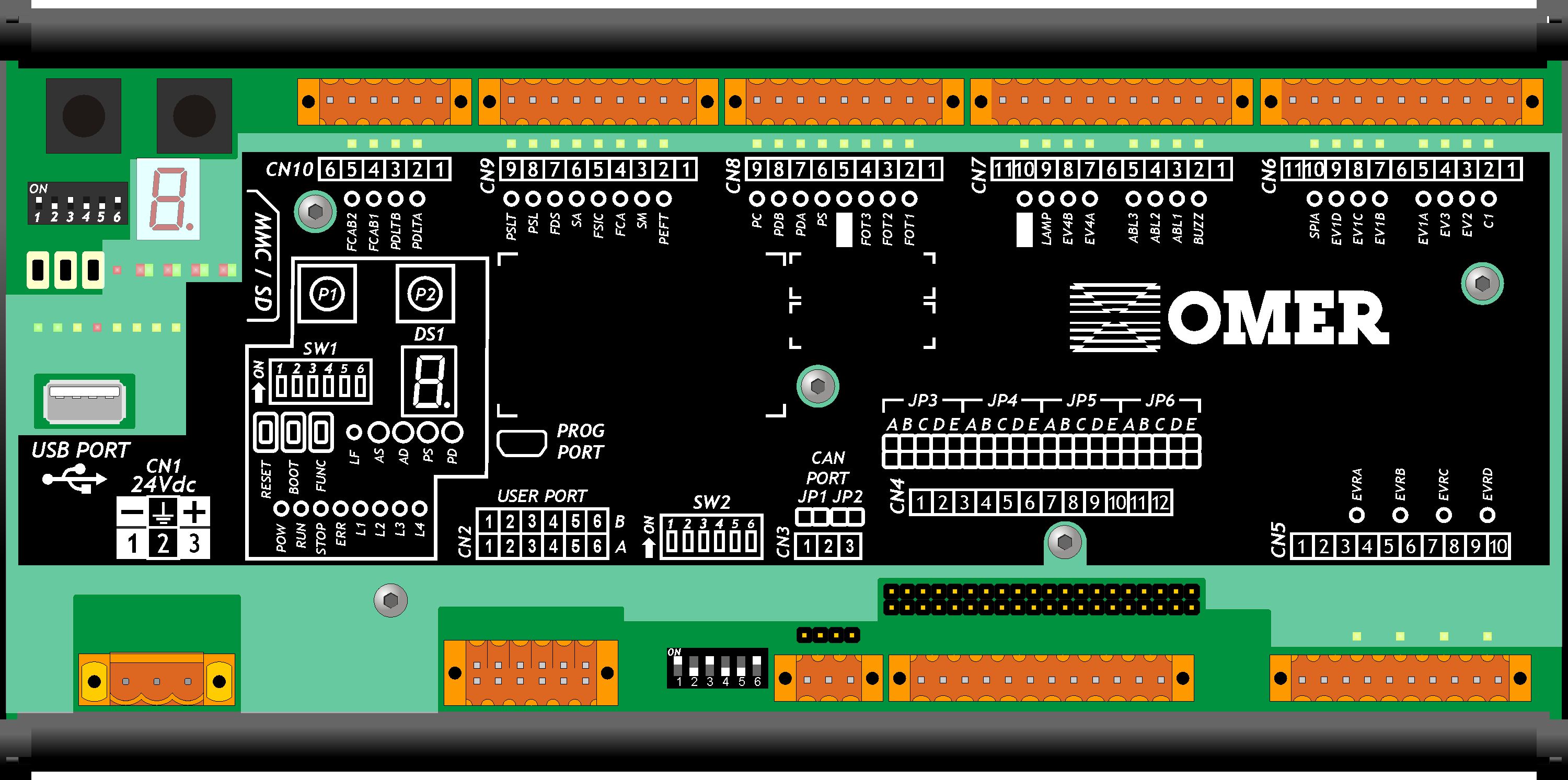
4.2 Slot 2 - Scheda B5-Q10

4.2.1 Connessioni
4.2.1.1 USER PORT
Connettore USER PORT
CN2 Morsetto RS232 RS422 RS485 Descrizione 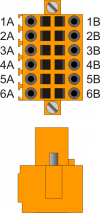
1A - - A Terminale A - RS485 2A - - B Terminale B - RS485 3A 0V 0V 0V Comune USER PORT 4A 0V 0V 0V Comune USER PORT 5A TX - - Terminale TX - RS232 6A Terra 1B - RX - Terminale RX - RS422 2B - RXN - Terminale RX N - RS422 3B - TX - Terminale TX - RS422 4B - TXN - Terminale TX N - RS422 5B RX - - Terminale RX - RS232 6B Terra Settaggio standard elettrico USER PORT
4.2.1.2 CANbus PORT
Connettori CANbus PORT
CN3 Morsetto Simbolo Description 
1 0V Comune CAN 2 CAN L Terminale CAN L 3 CAN H Terminale CAN H Settaggio resistenze di terminazione CANbus PORT
Nome
jumperImpostazione Funzione 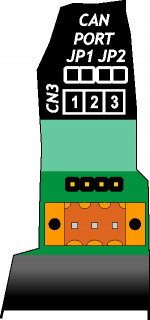
JP1 INSERITO Terminazione CAN attivata JP2 4.2.1.3 USB PORT
Connettore USB PORT

MMC/SD
 Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
4.2.1.4 16 ingressi digitali
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN8 Morsetto Simbolo Description Address 
1 0V Comune degli ingressi digitali 2 I1 Ingresso I1 2.INP01 3 I2 Ingresso I2 2.INP02 4 I3 Ingresso I3 2.INP03 5 I4 Ingresso I4 2.INP04 6 I5 Input I5 2.INP05 7 I6 Input I6 2.INP06 8 I7 Ingresso I7 2.INP07 9 I8 Ingresso I8 2.INP08 .
CN9 Morsetto Simbolo Description Address 1 0V Comune degli ingressi digitali 2 I9 Input I9 2.INP09 3 I10 Input I10 2.INP10 4 I11 Input I11 2.INP11 5 I12 Ingresso I12 2.INP12 6 I13 Ingresso I13 2.INP13 7 I14 Ingresso I14 2.INP14 8 I15 Ingresso I15 2.INP15 9 I16 Ingresso I16 2.INP16 4.2.1.5 2 ingressi di conteggio bidirezionale a 20KHz
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN10 Morsetto Simbolo Description Address 
1 24V Uscita +24V dc 2 PHA1 Fase A Conteggio 1
PNP Push-Pull2.INP17 2.CNT01 3 PHB1 Fase B 2.INP18 4 PHA2 Fase A Conteggio 2
PNP Push-Pull2.INP19 2.CNT02 5 PHB2 Fase B 2.INP20 6 0V 4.2.1.6 16 uscite digitali protette
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN6 Morsetto Simbolo Description Address 
1 V+ Ingresso alimentazione uscite O1÷O4 (12÷28V dc) 2 O1 Uscita digitale 1 2.OUT01 3 O2 Uscita digitale 2 2.OUT02 4 O3 Uscita digitale 3 2.OUT03 5 O4 Uscita digitale 4 2.OUT04 6 V+ Ingresso alimentazione uscite O5÷O8(12÷28V dc) 7 O5 Uscita digitale 5 2.OUT05 8 O6 Uscita digitale 6 2.OUT06 9 O7 Uscita digitale 7 2.OUT07 10 O8 Uscita digitale 8 2.OUT08 11 V- Ingresso alimentazione uscite (0V dc) .
CN7 Morsetto Simbolo Description Address 1 V+ Ingresso alimentazione uscite O9÷O12(12÷28V dc) 2 O9 Uscita digitale 9 2.OUT09 3 O10 Uscita digitale 10 2.OUT10 4 O11 Uscita digitale 11 2.OUT11 5 O12 Uscita digitale 12 2.OUT12 6 V+ Ingresso alimentazione uscite O13÷O16(12÷28V dc) 7 O13 Uscita digitale 13 2.OUT13 8 O14 Uscita digitale 14 2.OUT14 9 O15 Uscita digitale 15 2.OUT15 10 O16 Uscita digitale 16 2.OUT16 11 V- Ingresso alimentazione uscite (0V dc) 4.2.1.7 4 ingressi analogici 12bit
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN4 Morsetto Simbolo Description Address 
1 VREF1 Tensione di alimentazione trasduttore 2 IA1 Ingresso analogico 1 2.AI01 3 GAI Comune ingressi analogici 4 VREF2 Tensione di alimentazione trasduttore 5 IA2 Ingresso analogico 2 2.AI02 6 GAI Comune ingressi analogici 7 VREF3 Tensione di alimentazione trasduttore 8 IA3 Ingresso analogico 3 2.AI03 9 GAI Comune ingressi analogici 10 VREF4 Tensione di alimentazione trasduttore 11 IA4 Ingresso analogico 4 2.AI04 12 GAI Comune ingressi analogici Settaggio ingressi analogici
Inserire i jumper JP3, JP4, JP5 e JP6 per configurare i 4 ingressi analogici.

Jumper Stato Description Ingresso Tipo
ingressoJP3-A INSERITO Amperometrico 0-20mA IA1 JP3-B INSERITO Voltmetrico 0-5V JP3-C INSERITO Voltmetrico 0-10V JP3-A
JP3-B
JP3-CNON
INSERITOPotenziometrico Riferimento
di tensioneJP3-D INSERITO VREF1 = 2.5V JP3-E INSERITO VREF1 = 10,8V Tipo
ingressoJP4-A INSERITO Amperometrico 0-20mA IA2 JP4-B INSERITO Voltmetrico 0-5V JP4-C INSERITO Voltmetrico 0-10V JP4-A
JP4-B
JP4-CNON
INSERITOPotenziometrico Riferimento
di tensioneJP4-D INSERITO VREF2 = 2.5V JP4-E INSERITO VREF2 = 10,8V Tipo
ingressoJP5-A INSERITO Amperometrico 0-20mA IA3 JP5-B INSERITO Voltmetrico 0-5V JP5-C INSERITO Voltmetrico 0-10V JP5-A
JP5-B
JP5-CNON
INSERITOPotenziometrico Riferimento
di tensioneJP5-D INSERITO VREF3 = 2.5V JP5-E INSERITO VREF3 = 10,8V Tipo
ingressoJP6-A INSERITO Amperometrico 0-20mA IA4 JP6-B INSERITO Voltmetrico 0-5V JP6-C INSERITO Voltmetrico 0-10V JP6-A
JP6-B
JP6-CNON
INSERITOPotenziometrico Riferimento
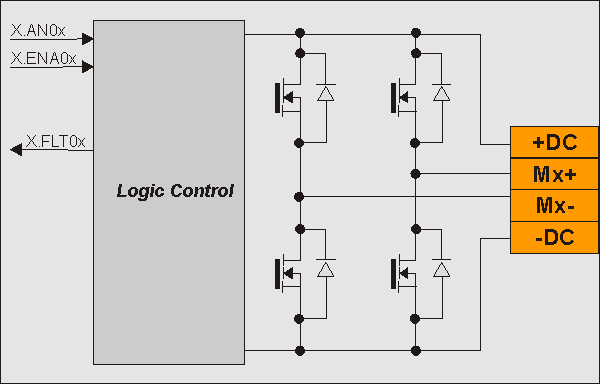
di tensioneJP6-D INSERITO VREF4 = 2.5V JP6-E INSERITO VREF4 = 10,8V 4.2.1.8 4 Uscite PWM per comando motore
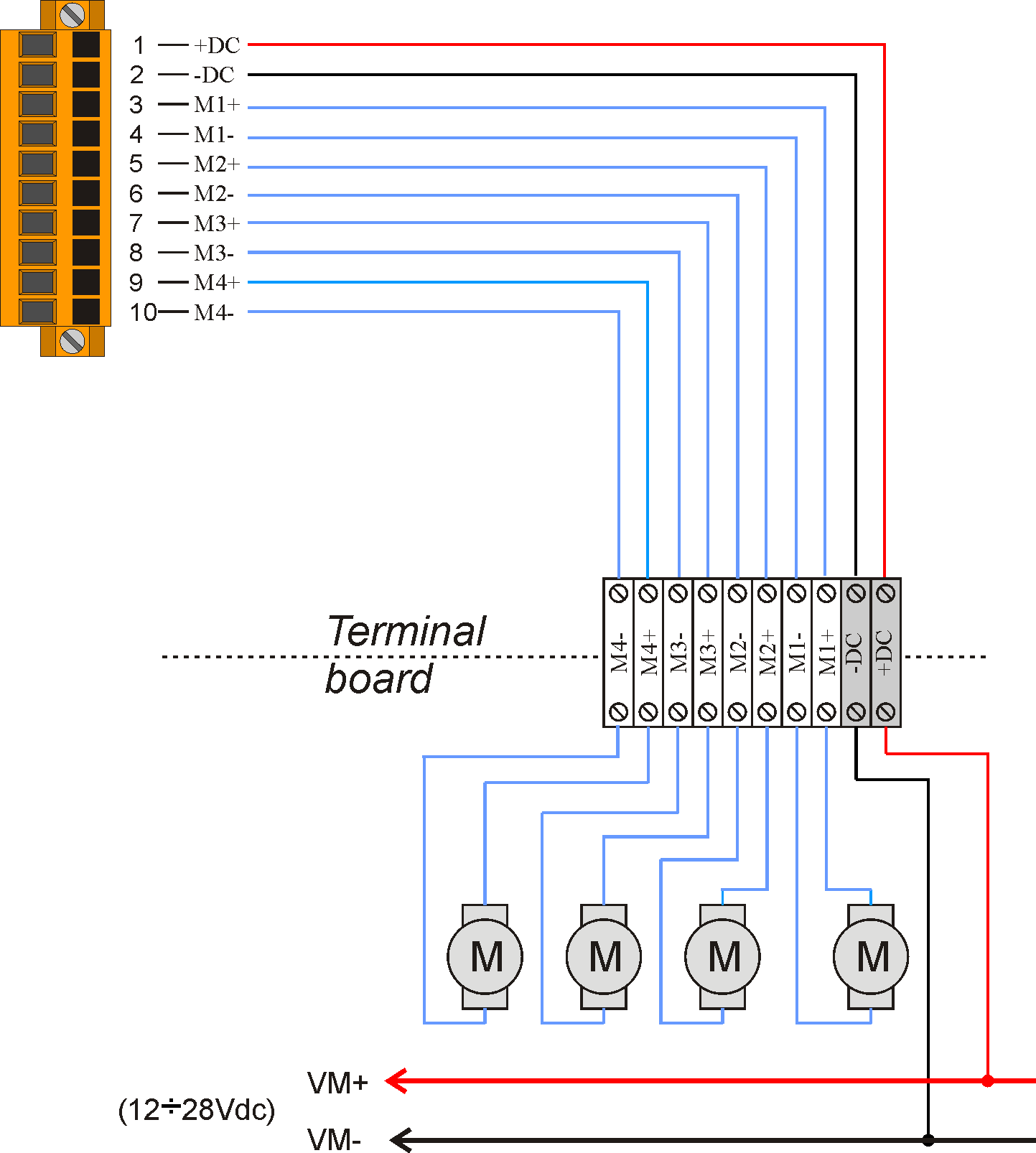
CN5 Morsetto Simbolo Description Address 
1 +DC Ingresso positivo tensione bus DC 2 -DC Ingresso negativo tensione bus DC 3 M1+ Uscita Motore 1 2.AN01 4 M1- 5 M2+ Uscita Motore 2 2.AN02 6 M2- 7 M3+ Uscita Motore 3 2.AN03 8 M3- 9 M4+ Uscita Motore 4 2.AN04 10 M4- 4.2.2 Caratteristiche elettriche
Di seguito sono riportate le caratteristiche elettriche hardware.
Il connettore USB mini-B non supporta gli standard elettrici USB, deve essere utilizzato solamente mediante una interfaccia IQ009 o IQ013.
Utilizzata per il trasferimento e il debugging del programma applicativo nella CPU.
Standard elettrico TTL (Usare l'interfaccia seriale IQ009 o IQ013) Velocità di comunicazione Min. 9,6 Kbaud - max 115200 Kbaud
settabile tramite i dip1 e 2 dello switch SW1Isolamento Nessuno .



Collegamento tra Qmove+ e PC, con l'ausilio dell'accessorio IQ009 .


Collegamento tra Qmove+ e un dispositivo dotato di seriale RS232 (per esempio un MODEM),
con l'ausilio dell'interfaccia IQ013Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Riferito a 0V Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 15 m Impedenza d'ingresso > 3 Kohm Limite corrente cortocircuito 7 mA 

Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 


Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio standard elettrico USER PORT, Settaggio standard elettrico AUX1 PORT o Settaggio resistenze di polarizzazione e terminazione AUX2 PORT
.
Velocità di comunicazione 4800 baud (solo se utilizzata con device SERCOM e/o MODBUS),
9600 baud, 19200 baud, 38400 baud, 57600 baudModalità di comunicazione Half duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 32 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 

Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio resistenze di terminazione
.
Velocità di comunicazione 125, 250, 500, 1000 Kbit/s Max. numero Driver/Receiver sulla linea 100 Max. lunghezza cavi 500m @ 125Kbit/s, 250m @ 250Kbit/s, 100m @ 500Kbit/s, 25m @ 1000Kbit/s Impedenza d'ingresso >15Kohm Limite corrente cortocircuito 45mA 


Esempio di collegamento CAN BUS.
Attenzione: chiudere i DIP JP1 e JP2 ed inserire le resistenze di terminazione (RL, RH) sull'ultimo dispositivo della catena.
Tipo Memory Card da utilizzare MMC, SD e SDHC fino a 8GB
Per un corretto funzionamento è necessario che il dispositivo sia conforme agli standard definiti da “SD Association” (www.sdcard.org) oppure da “Multi Media Card Association” (www.mmca.org).Per essere utilizzate le Memory Card devono essere preventivamente formattate con file system FAT16 o FAT32.
Tipo Sinking (PNP) Tempo min. di acquisizione (hardware) 3ms Tensione di funzionamento nominale 12÷24Vdc Tensione stato logico 0 0÷2 V Tensione stato logico 1 10,5 ÷ 26,5 V Corrente assorbita 2mA@10.5V / 8mA@26.5V 
4.2.3 Ingressi analogici amperometrici
Connection type Amperometric
(0-20 mA)Resolution 12bit/16bit1) Input resistance 125Ω Value of damage 25 mA Max. Linearity error + 0,1% Vfs Max. Offset error + 0,1% Vfs S.n. 71 dB Conversion time It depends on the configuration of the analog input.
See section Conversion times if present 2)Isolation 1000 Vrms
1) It depends on the Hardware versions2) The sampling time of the device must be equal or higher than the conversion time
4.2.4 Ingressi analogici potenziometrici
Connection type Potentiometric 1KΩ÷20KΩ Resolution 12bit/16bit1) Reference voltage output 2,5Vdc Max output current from reference 10mA Input resistance 10MΩ Max. Linearity error + 0,1% Vfs Max. Offset error + 0,1% Vfs S.n. 71 dB Conversion time It depends on the configuration of the analog input.
See section Conversion times if present 2)Isolation 1000 Vrms
1) It depend on the Hardware versions2) The sampling time of the device must be equal or higher than the conversion time
4.2.5 Ingressi analogici voltmetrici 0-5V
Connection type Voltmetric
0÷5VResolution 12bit/16bit1) Input resistance (Rin) 60KΩ Value of damage 20V Max. Linearity error + 0,1% Vfs Max. Offset error + 0,1% Vfs S.n. 71 dB Conversion time It depends on the configuration of the analog input.
See section Conversion times if present 2)Isolation 1000 Vrms
1) It depend on the Hardware versions2) The sampling time of the device must be equal or higher than the conversion time
4.2.6 Ingressi analogici voltmetrici 0-10V
Connection type Voltmetrico
0÷10VResolution 12bit/16bit1) Input resistance (Rin) 40KΩ Value of damage 20V Max. Linearity error + 0,1% Vfs Max. Offset error + 0,1% Vfs S.n. 71 dB Conversion time It depends on the configuration of the analog input.
See section Conversion times if present 2)Isolation 1000 Vrms
1) It depends on the Hardware versions2) The sampling time of the device must be equal or higher than the conversion time
4.2.7 Protected digital output
Switchable load Dc (PNP) Max. operating voltage 28V Insulation 1000Vpp Max. internal voltage drop 600mV Max internal resistance @ON 90mΩ Max. protection current 12A Max. operating current 2A Max. current @OFF 5µA Max switching time from ON to OFF 270µs Max switching time from OFF to ON 250µs 
4.2.8 Uscite PWM per comando motore
Isolamento 1000 Vrms Tensione massima di funzionamento 28Vdc Corrente massima di protezione 5A Corrente massima di funzionamento 1A 
5. Wiring example
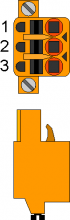
5.1 CANbus

-
Sul primo (1) e sull'ultimo (3) dispositivo della catena, devono essere inserite le resistenze di terminazione.
-
La calza dei cavi deve essere connessa a terra tramite gli appositi faston presenti sulla carcassa metallica.
-
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio resistenze di terminazione CANbus PORT
5.2 Digital input

5.3 Ingressi analogici

5.4 Protected digital output

5.5 4 Uscite PWM per comando motore

6. Settaggi, procedure e segnalazioni

6.1 Selettore baud-rate di PROG PORT, USER PORT e CAN PORT
SW1 Dip Impostazione dei DIP Funzione 
1 OFF Baud-rate 57600 Selezione velocità di trasmissione PROG PORT ON Baud-rate 115200 2 OFF Baud-rate 57600 Selezione velocità di trasmissione USER PORT ON Baud-rate 115200 3 OFF Utilizzabile anche dai device SERCOM e MODBUS Selezione modo di funzionamento PROG PORT ON Non utilizzabile dai device SERCOM e MODBUS 4 OFF ON OFF ON Velocità di trasmissione CANbus (CanOpen)1) 5 OFF OFF ON ON Baud-rate
125KB/SBaud-rate
250KB/SBaud-rate
500KB/SBaud-rate
1MB/S6 Non utilizzato
1) Valido se nella dichiarazione del device CANOPEN viene settata la velocità a 06.2 Led
6.2.1 Led di sistema
I led “pow, run, stop, err” sono detti “led di sistema”.
6.2.1.1 Segnalazioni "Led di sistema"
Legenda:
 Led ON
Led ON
 Led OFF
Led OFF
 Led Lampeggiante
Led Lampeggiante
Led Colore Stato Description pow Green Strumento acceso Se è l'unico led acceso, segnala lo stato di reset della CPU run Green CPU in stato di RUN CPU in stato di READY stop Yellow Se il led pow è acceso, segnala lo stato di STOP della CPU
Se il led pow è spento, segnala lo stato di BOOT della CPUerr Red Se il led pow è spento, segnala un errore hardware. Vedere paragrafo Codici di errore hardware
Se il led pow è acceso, il numero di lampeggi indica il tipo d'errore. Vedere paragrafo Segnalazioni del led err6.2.1.2 Segnalazioni del led err
N°
lampeggiErrore Descrizione Azioni consigliate 1 Bus error Bus non configurato come descritto nell'applicativo. Verificare la corrispondenza tra la configurazione dell'applicativo QMOVE (sezione BUS della unit di configurazione) e quella del prodotto (schede presenti nel BUS). 2 CheckSum Error Il controllo di integrità sulle variabili ritentive ha dato esito negativo. (Vedi capitolo Reset Error Checksum) E' necessario ripristinare i dati macchina a partire da un salvataggio (file con estensione DAT) oppure cancellare l'errore con l'apposita funzione di sistema e reintrodurre manualmente i valori. 3 Index Out of Bound Indice di un array è puntato su un elemento inesistente Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 4 Program Over Range L'indice di selezione programma all'interno del DATAGROUP ha tentato di accedere ad un programma non esistente. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 5 Step Over Range l'indice di selezione del passo all'interno del DATAGROUP ha tentato di accedere ad un passo non esistente. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 6 Division By Zero Il denominatore di un'operazione di divisione del programma applicativo ha valore zero. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. 7 Syntax Error Il programma applicativo ha un'istruzione non valida Tale errore potrebbe comparire perchè il program counter ha incontrato l'istruzione QCL END. 8 Watch Dog Error Un modulo CAN non funziona correttamente, oppure una scheda di specializzazione ha un problema hardware Con l'ambiente di sviluppo Qview è possibile aprire il pannello “Monitor→Bus” e nella colonna di destra chiamata “Watchdog Bus” è indicata la scheda che ha causato il problema. 9 Stack Error Il programma applicativo ha utilizzato tutti i livelli di chiamata a subroutine permessi Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. Analizzare il flusso di esecuzione della unit, gli annidamenti di chiamata delle subroutine hanno un limite, oltre il quale viene generato questo errore. 6.2.1.3 Codici di errore hardware
Se nella fase di accensione, viene rilevato un malfunzionamento di qualche periferica, il sistema si blocca e viene segnalato l'errore mediante il lampeggio del solo led
err mentre tutti gli altri leds di sistema rimangono spenti.
Il numero di lampeggi indica il tipo di errore secondo la seguente tabella:
Numero di lampeggi Errore 1 Segnalazione non attiva 2 Segnalazione non attiva 3 Media 4 Bootloader 5 FW 6 Segnalazione non attiva 7 Segnalazione non attiva 8 SYS data write 9 Exception Ognuna di queste segnalazioni indica una situazione di errore grave. Il prodotto deve essere inviato all'assistenza QEM.
6.2.2 Led utente
I led “L1, L2, L3, L4, LF, A1, A2, A3, A4” sono detti “led utente”
6.2.2.1 Segnalazioni "Led utente"
Led Colore Description L1 Yellow Programmabili nel programma applicativo tramite la variabile di sistema QMOVE:sys003 ed utilizzati dalle Funzioni di sistema L2 L3 L4 LF Red Programmabili tramite variabili presenti nelle risorse della scheda B5-Q10. A1 Rosso-verde A2 Rosso-verde A3 Rosso-verde A4 Rosso-verde 6.3 Pulsanti
Nome Description  FUNC
FUNC Premuto all'accensione dello strumento permette di accedere alle Funzioni di sistema BOOT Premuto all'accensione dello strumento permette di impostare la CPU in stato di Boot e quindi di accedere alle funzioni di aggiornamento firmware RESET Reset CPU. Il sistema viene fatto ripartire ripristinando le condizioni iniziali (come dopo una accensione)  P1
P1 Utilizzabili nell'applicazione e lo stato è acquisibile tramite variabili presenti nelle risorse della scheda B5-Q10. P2 7. Informazioni per la programmazione
In questo capitolo sono raccolte tutte le informazioni relative al prodotto necessarie durante la programmazione, ovvero durante lo sviluppo di un applicativo QCL.
7.1 Ambienti di sviluppo
Per la programmazione del prodotto è necessario utilizzare l'ambiente Qview-6 per la programmazione del codice QCL. Tale software è contenuto in un pacchetto software che si chiama Qworkbench e che è liberamente scaricabile dal sito Qem (nella sezione download).
Lo strumento è equipaggiato fisicamente da 3 slot come indicato nel capitolo Conformazione prodotto. Gli slots da 4 a 8 sono comunque dichiarabili e devono venire utilizzati per indirizzare risorse che risiedono nei moduli remoti Canopen.
Un esempio di dichiarazione del BUS da utilizzare nella sezione BUS della unit di configurazione è:
BUS 1 100CF 10 2 B5Q10 . 3 . .
7.2 Memorie utilizzate
In questo paragrafo vedremo come è possibile rilevare una stima dell'utilizzo delle memorie nel prodotto. La memoria non volatile, disponibile per memorizzare il programma QCL, ha una capacità di 512KB.
La quantità di memoria occupata è pari alla dimensione del file .BIN generato dal Qview. La percentuale di memoria occupata è visualizzabile nel pannello CPU del Qview, alla voce “Used CODE memory”, oppure è possibile ottenere questa informazione dal valore del parametro “sizeapp” del device QMOS.La memoria dati non volatile, disponibile per memorizzare le variabili ritentive, ha una capacità di 13KB.
La percentuale di memoria occupata è visualizzabile nel pannello CPU del Qview, alla voce “Used RETENTIVE”, oppure è possibile ottenere questa informazione dal valore del parametro “sizeret” del device QMOS.La memoria dati volatile per memorizzare le variabili non ritentive ha una capacità dipendente da vari fattori (per esempio la dimensione del programma QCL).
7.3 Porte di comunicazione
Le seriali PROG PORT e USER PORT implementano il protocollo di comunicazione proprietario QEM chiamato BIN1.
I device SERCOM e MODBUS sono utilizzabili con tutte le seriali di comunicazione compresa la PROG PORT. Il valore numerico da utilizzare durante la dichiarazione del device per selezionare il canale di comunicazione è il seguente:
0 PROG PORT 1 USER PORT
Quando i devices SERCOM e MODBUS utilizzano la PROG PORT o la USER PORT essi interessano il canale solo se lo stato di comunicazione del device è aperto (st_opencom = 1). Quando il canale del device viene chiuso (st_opencom = 0) nella seriale ritorna attivo il protocollo BIN1. Se si volesse forzare il protocollo BIN1 sulla porta PROG (ed impedire quindi che il device SERCOM occupi il canale) è necessario attivare il dip 6 di SW1.
Quando si utilizza il protocollo MODBUS RTU con la configurazione elettrica RS485, bisogna fare attenzione al fatto che quando la seriale è in trasmissione lo strumento mantiene attivo il canale (DE) per un tempo superiore a quello stabilito dalla specifica “MODBUS RTU”. Per questo bisogna considerare un tempo minimo di 5 millisecondi dopo i quali sarà possibile ricevere un nuovo messaggio. Anche il device SERCOM quando termina una trasmissione è soggetto al medesimo tempo in cui viene mantenuto il canale attivo (DE).
7.4 Particolarità del linguaggio di programmazione
Vediamo in dettaglio la lista delle limitazioni al linguaggio QCL:
Description Notes FSTEP,FPROG Non è possibile utilizzare queste istruzioni. Di conseguenza viene a mancare la compatibilità diretta con applicativi scritti per CPU livello A. La conversione dell'applicativo risulta comunque semplice. Vediamo in dettaglio altre limitazioni:
Description Notes Watchpoint Non disponibili 7.5 Messaggi di errore del firmware
Durante il download dell'applicativo Qmove l'ambiente di sviluppo Qpaint-6 può visualizzare alcuni errori non descritti nel manuale dell'ambiente di sviluppo. Tali errori sono particolari e la stringa descrittiva visualizzata dal Qpaint-6 viene generata direttamente dal firmware.
Nella seguente tabella sono descritti i possibili messaggi di errore generati dal firmware.
7.5.1 Messaggi d'errore firmware
Possibili messaggi d'errore Description Error: SYSTEM + ARRSYS + DATAGROUP + INTDEVICE size overflow by 234bytes.Compare quando le variabili ritentive superano il valore massimo consentito. Error: serial port not avaliable in SERCOM or MODBUS device declaration.Compare quando Il valore numerico utilizzato durante la dichiarazione del device per selezionare il canale di comunicazione è errato. Error: CANOPEN device required if you use more than 4 slots.Nella definizione del BUS si stanno utilizzando più di 4 slots e quindi l'applicazione richiede l'utilizzo di moduli Canopen. Per questa gestione è necessario dichiarare un device CANOPEN. Error: incorrect bus fault mode in CANOPEN declaration.Nella dichiarazione del device CANOPEN si è indicata una modalità di fault (ultimo valore nella dichiarazione) non supportata. Error: incorrect canbus speed in CANOPEN declaration.Nella dichiarazione del device CANOPEN si è indicata una velocità non valida. Error: too much CANOPEN device declaration.Può essere dichiarato un solo device CANOPEN. 7.6 Variabili di sistema
L'ambiente di sviluppo mette a disposizione una serie di variabili predefinite che possono essere utilizzate precedendo al nome la parola chiave “QMOVE:”. Per esempio “QMOVE:is_suspend”, “QMOVE:sys001”, ecc. Lo scopo del presente paragrafo è illustrare le 16 variabili di sistema chiamate sys001÷sys016 il cui significato dipende dal firmware che si sta utilizzando.
sys001
Questa variabile a sola lettura indica lo stato dei pulsanti FUNC (bit 0) e BOOT (bit 1). I valori possibili sono dunque:
0 = nessun pulsante premuto.
1 = pulsante FUNC premuto.
2 = pulsante BOOT premuto.
3 = pulsanti FUNC e BOOT premuti.sys002
Questa variabile permette la lettura dell'immagine del dip-switch SW1. L'immagine viene acquisita solo all'accensione del prodotto. Il bit 0 corrisponde al dip 1 e così via.
sys003
Questa variabile permette il comando del led L1-L2-L3-L4. Il bit 0 corrisponde a L1, il bit1 a L2 e così via.
sys004÷009
Non utilizzate.
sys010
Questa variabile rappresenta lo stato della connessione USB. E' una variabile i cui bit hanno il seguente significato:
bit 0 = port connected bit 1 = device connected is Android Open Accessory bit 2 = tx or rx active (1 per 60msec ogni dato)
sys011÷016
Non utilizzate.
7.7 I devices
Con il termine device si identifica una categoria di dispositivi software atti a svolgere attività di supporto e di controllo, più o meno complesse, per risolvere le problematiche legate all'automazione dei sistemi. I devices si distinguono in due tipologie: interni ed esterni. I primi sono quelli il cui codice risiede e viene eseguito dal firmware del prodotto stesso. I secondi sono quelli il cui codice risiede e viene eseguito da schede di specializzazione “intelligenti” munite cioè di propria potenza di calcolo. Il prodotto ivi descritto può gestire solamente devices di tipo interno. La lista dei devices implementati nel firmware dipende dalla versione firmware. Lo scopo del presente paragrafo è quello di illustrare la lista e le caratteristiche dei devices disponibili.
Il firmware versione 10 implementa i seguenti devices:
7.7.1 Particolarità dei devices
CANOPEN
Se nella dichiarazione del device CANOPEN viene indicata la velocità zero allora essa diventa impostabile tramite i dip nr. 4 e 5 di SW1.
Il primo slot per indirizzare risorse che risiedono all'interno di moduli Canopen è il 4.
L'ultimo dato indicato nella dichiarazione del device è il fault mode.
Esso può assumere i seguenti valori:
-
0: se un nodo CANopen non viene rilevato, all'avvio la cpu segnala BUS ERROR.
-
1: se un nodo CANopen non viene rilevato, all'avvio la cpu no segnala errori. In questo caso la diagnostica della connessione dovrà essere fatta a livello applicazione.
Il numero massimo di slave collegati è 5 (l'ultimo è mappato nello SLOT nr.8).
La lunghezza massima di un SDO è ridotta a 128bytes.
DATASTORE
I files manipolati dal device DATASTORE sono tutti contenuti nella cartella /DS. Se questa cartella non esiste nel dispositivo essa viene creata automaticamente.
Esiste una particolare impostazione dei parametri che permette di verificare l'esistenza di un file nel dispositivo. Si utilizza il parametro “filenum” impostato al valore -1 e con il comando OPENFILE il device invece di aprire il file ricerca il primo file presente nella directory “/DS/” del dispositivo scelto. Quando trovato, il nome di tale file sarà impostato dal device nel parametro “filenum” stesso (ed il tipo nel parametro “filetype”). Impostando nuovamente -1 in “filenum” ed eseguendo il comando OPENFILE verrà cercato il nome del file successivo e così via. Ogniqualvolta verrà effettuata una operazione di OPENFILE con il filenum diverso da -1 il loop di ricerca verrà chiuso. Quando la ricerca sarà terminata e non vi saranno più file presenti, allora il device imposterà come risposta al comando OPENFILE “filenum = -2”. L'avvenuta esecuzione del comando sarà segnalata dal flag st_busy = 0. Se l'estensione del file non è HEX o CSV il file stesso viene ignorato dalla ricerca. Nel caso in cui il nome file non sia compatibile con quelli gestiti dal DATASTORE (numeri da 0 a 9999999) allora “filenum” rimarrà impostato a -1 e verrà segnalato un warning.
QMOS
Il parametro “frwuvalue01” contiene il valore numerico del serial number del prodotto.
7.8 Risorse delle schede
Di seguito vengono riportati i simboli presenti nella scheda B5Q10 da utilizzare nel progetto QView per accedere alle risorse della scheda.
Signal name Type Access Size Description AI01 INPUT RD WORD Indirizzo ingressi analogici da utilizzare nella dichiarazione del device (per es ANINP). AI02 INPUT RD WORD AI03 INPUT RD WORD AI04 INPUT RD WORD OUT01 OUTPUT RDWR FLAG Stato uscite digitali. OUT02 OUTPUT RDWR FLAG OUT03 OUTPUT RDWR FLAG OUT04 OUTPUT RDWR FLAG OUT05 OUTPUT RDWR FLAG OUT06 OUTPUT RDWR FLAG OUT07 OUTPUT RDWR FLAG OUT08 OUTPUT RDWR FLAG OUT09 OUTPUT RDWR FLAG OUT10 OUTPUT RDWR FLAG OUT11 OUTPUT RDWR FLAG OUT12 OUTPUT RDWR FLAG OUT13 OUTPUT RDWR FLAG OUT14 OUTPUT RDWR FLAG OUT15 OUTPUT RDWR FLAG OUT16 OUTPUT RDWR FLAG LEDA1G OUTPUT RDWR FLAG Stato led utente A1 verde. LEDA1R OUTPUT RDWR FLAG Stato led utente A1 rosso. LEDA2G OUTPUT RDWR FLAG Stato led utente A2 verde. LEDA2R OUTPUT RDWR FLAG Stato led utente A2 rosso. LEDA3G OUTPUT RDWR FLAG Stato led utente A3 verde. LEDA3R OUTPUT RDWR FLAG Stato led utente A3 rosso. LEDA4G OUTPUT RDWR FLAG Stato led utente A4 verde. LEDA4R OUTPUT RDWR FLAG Stato led utente A4 rosso. DISPA OUTPUT RDWR FLAG Stato dei segmenti A÷F del led utente DS1. DISPB OUTPUT RDWR FLAG DISPC OUTPUT RDWR FLAG DISPD OUTPUT RDWR FLAG DISPE OUTPUT RDWR FLAG DISPF OUTPUT RDWR FLAG DISPG OUTPUT RDWR FLAG LEDLF OUTPUT RDWR FLAG Stato led utente LF. OUTB1 OUTPUT RDWR BYTE Stato a byte delle uscite digitali. OUTB2 OUTPUT RDWR BYTE OUTB3 OUTPUT RDWR BYTE OUTB4 OUTPUT RDWR BYTE OUTDIS OUTPUT RDWR BYTE Stato a byte per rappresentare gli stati dei segmenti A÷F del led utente DS1 e lo stato del led LF. OUTW1 OUTPUT RDWR WORD Stato a word delle uscite digitali. OUTW2 OUTPUT RDWR WORD OUTL OUTPUT RDWR LONG Stato a long delle uscite digitali. ENA01 OUTPUT RDWR FLAG Abilitazione potenza nelle uscite motore 1÷4 ENA02 OUTPUT RDWR FLAG ENA03 OUTPUT RDWR FLAG ENA04 OUTPUT RDWR FLAG CMDS OUTPUT RDWR BYTE Valore a byte delle abilitazioni potenza nelle uscite motore 1÷4. DMODE01 OUTPUT RDWR FLAG Se tali impostazioni hanno valore 1 allora ad ogni impostazione del valore zero nel DAC (simbolo AN0x), viene generato un impulso all'uscita DAC al valore -32768 per un tempo pari al valore impostato in DTIME (in msec). DMODE02 OUTPUT RDWR FLAG DMODE03 OUTPUT RDWR FLAG DMODE04 OUTPUT RDWR FLAG DMODEB OUTPUT RDWR BYTE E' la rappresentazione a byte dei 4 valori DMODE01÷04. DTIME OUTPUT RDWR BYTE Tempo dell'impulso all'uscita DAC. Vedere la descrizione di DMODE0x. TCANENA OUTPUT RDWR FLAG Abilitazone comunicazione TCAN. Impostando 1 viene abilitata la comunicazione TCAN. Non deve essere presente nell'applicativo il device CANOPEN altrimenti questa variabile torna automaticamente a zero. Se comparissero errori di comunicazione riportare a zero e poi a uno tale variabile la periferica canbus viene reinizializzata. TCANERR OUTPUT RDWR FLAG Indica che vi sono errori di comunicazione. Se tale variabile viene portata al valore 1 poi ci rimane e deve essere resettata da QCL scrivendo il valore zero. Tale segnalazione può essere usata per generare un warning. Se azzerando la variabile essa ritorna a uno allora è necessario reinizializare la periferica canbus (con il simbolo TCANENA posto a zero e poi ripristinato a 1). TCANIDB0 OUTPUT RDWR FLAG Assieme al simbolo TCANIDB1 permette di definire l'indirizzo TCAN. Tale valore va da zero a 3. Il valore va espesso considerando che TCANIDB0 è il bit meno significativo e TCANIDB1 è il più significativo. TCANIDB1 OUTPUT RDWR FLAG TCANWEN OUTPUT RDWR FLAG Abilita i messaggi in scrittura. TCANO1W1 OUTPUT RDWR WORD Messaggio TCAN nr.1 in scrittura verso le altre stazioni. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANO1W2 OUTPUT RDWR WORD TCANO1W3 OUTPUT RDWR WORD TCANO1W4 OUTPUT RDWR WORD TCANO1L1 OUTPUT RDWR LONG TCANO1L2 OUTPUT RDWR LONG TCANO2W1 OUTPUT RDWR WORD Messaggio TCAN nr.2 in scrittura verso le altre stazioni. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANO2W2 OUTPUT RDWR WORD TCANO2W3 OUTPUT RDWR WORD TCANO2W4 OUTPUT RDWR WORD TCANO2L1 OUTPUT RDWR LONG TCANO2L2 OUTPUT RDWR LONG TCANI1W1ID0 INPUT RD WORD Messaggio nr 1 TCAN in lettura proveniente dalla stazione con ID zero. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI1W2ID0 INPUT RD WORD TCANI1W3ID0 INPUT RD WORD TCANI1W4ID0 INPUT RD WORD TCANI1L1ID0 INPUT RD LONG TCANI1L2ID0 INPUT RD LONG TCANI2W1ID0 INPUT RD WORD Messaggio nr 2 TCAN in lettura proveniente dalla stazione con ID zero. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI2W2ID0 INPUT RD WORD TCANI2W3ID0 INPUT RD WORD TCANI2W4ID0 INPUT RD WORD TCANI2L1ID0 INPUT RD LONG TCANI2L2ID0 INPUT RD LONG TCANI1W1ID1 INPUT RD WORD Messaggio nr 1 TCAN in lettura proveniente dalla stazione con ID 1. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI1W2ID1 INPUT RD WORD TCANI1W3ID1 INPUT RD WORD TCANI1W4ID1 INPUT RD WORD TCANI1L1ID1 INPUT RD LONG TCANI1L2ID1 INPUT RD LONG TCANI2W1ID1 INPUT RD WORD Messaggio nr 2 TCAN in lettura proveniente dalla stazione con ID 1. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI2W2ID1 INPUT RD WORD TCANI2W3ID1 INPUT RD WORD TCANI2W4ID1 INPUT RD WORD TCANI2L1ID1 INPUT RD LONG TCANI2L2ID1 INPUT RD LONG TCANI1W1ID2 INPUT RD WORD Messaggio nr 1 TCAN in lettura proveniente dalla stazione con ID 2. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI1W2ID2 INPUT RD WORD TCANI1W3ID2 INPUT RD WORD TCANI1W4ID2 INPUT RD WORD TCANI1L1ID2 INPUT RD LONG TCANI1L2ID2 INPUT RD LONG TCANI2W1ID2 INPUT RD WORD Messaggio nr 2 TCAN in lettura proveniente dalla stazione con ID 2. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI2W2ID2 INPUT RD WORD TCANI2W3ID2 INPUT RD WORD TCANI2W4ID2 INPUT RD WORD TCANI2L1ID2 INPUT RD LONG TCANI2L2ID2 INPUT RD LONG TCANI1W1ID3 INPUT RD WORD Messaggio nr 1 TCAN in lettura proveniente dalla stazione con ID 3. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI1W2ID3 INPUT RD WORD TCANI1W3ID3 INPUT RD WORD TCANI1W4ID3 INPUT RD WORD TCANI1L1ID3 INPUT RD LONG TCANI1L2ID3 INPUT RD LONG TCANI2W1ID3 INPUT RD WORD Messaggio nr 2 TCAN in lettura proveniente dalla stazione con ID 3. E' un messaggio da 8 bytes e vi sono sia i parametri per la rappresenrazione a word che per la rappresentazione a long. TCANI2W2ID3 INPUT RD WORD TCANI2W3ID3 INPUT RD WORD TCANI2W4ID3 INPUT RD WORD TCANI2L1ID3 INPUT RD LONG TCANI2L2ID3 INPUT RD LONG INP01 INPUT RD FLAG Stato degli ingressi digitali da 1÷20. INP02 INPUT RD FLAG INP03 INPUT RD FLAG INP04 INPUT RD FLAG INP05 INPUT RD FLAG INP06 INPUT RD FLAG INP07 INPUT RD FLAG INP08 INPUT RD FLAG INP09 INPUT RD FLAG INP10 INPUT RD FLAG INP11 INPUT RD FLAG INP12 INPUT RD FLAG INP13 INPUT RD FLAG INP14 INPUT RD FLAG INP15 INPUT RD FLAG INP16 INPUT RD FLAG INP17 INPUT RD FLAG INP18 INPUT RD FLAG INP19 INPUT RD FLAG INP20 INPUT RD FLAG FLT01 INPUT RD FLAG Stato di fault dell'uscita motore 1÷4. FLT02 INPUT RD FLAG FLT03 INPUT RD FLAG FLT04 INPUT RD FLAG STATUS INPUT RD BYTE Valore a byte dei fault dell'uscita motore. BUTTON1 INPUT RD FLAG Stato del pulsante utente P1. BUTTON2 INPUT RD FLAG Stato del pulsante utente P2. INPB1 INPUT RD BYTE Stato a byte degli ingressi digitali. INPB2 INPUT RD BYTE INPB3 INPUT RD BYTE INPB4 INPUT RD BYTE INPB5 INPUT RD BYTE INPW1 INPUT RD WORD Stato a word degli ingressi digitali. INPW2 INPUT RD WORD INPL INPUT RD LONG Stato a long degli ingressi digitali. AN01 DAC WR WORD Indirizzo della periferica DAC per il controllo della potenza all'uscita motore 1÷4. Da utilizzare nella dichiarazione del device. AN02 DAC WR WORD AN03 DAC WR WORD AN04 DAC WR WORD CNT01 COUNT RD WORD Indirizzo del contatore bidirezione nr.1 da utilizzare nella dichiarazione del device. CNT02 COUNT RD WORD Indirizzo del contatore bidirezione nr.2 da utilizzare nella dichiarazione del device. 8. Accessori disponibili
-
-