目录
RMC-1S

I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM. QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento. QEM® è un marchio registrato.
Informazioni
| |
||||
| Documento: | MIMRMC-1S | |||
|---|---|---|---|---|
| Descrizione: | Manuale di installazione e manutenzione | |||
| Redattore: | Alessandro Frison | |||
| Approvatore | Denis Dal Ronco | |||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/moduli/rmc-1s/mimrmc1s | |||
| Lingua: | Italiano | |||
| Release documento | Release Hardware | Descrizione | Note | Data |
| 01 | Nuovo manuale | 01/09/2013 | ||
| 02 | Corretto il connettore Power supply, + e - risultavano invertiti | 29/10/2015 | ||
| 03 | Aggiunte le immagini mancanti e correzioni varie | 19/10/2018 | ||
| 04 | Cambio Redattore: Riccardo Furlato → Frison Alessandro & Cambio Approvatore: Tognon Giuliano → Denis Dal Ronco | 11/07/2024 | ||
| 05 | Aggiunta sezione 6: Informazioni per la programmazione | 11/07/2024 | ||
L'apparecchiatura è stata progettata per l'impiego in ambiente industriale in conformità alla direttiva 2004/108/CE.
-
EN 61000-6-4: Compatibilità elettromagnetica - Norma generica sull'emissione in ambiente industriale
-
EN55011 Class A: Limiti e metodi di misura
-
EN 61000-6-2: Compatibilità elettromagnetica - Norma generica sull'immunità negli ambienti industriali
-
EN 61000-4-2: Compatibilità elettromagnetica - Immunità alle scariche elettrostatiche
-
EN 61000-4-3: Immunità ai campi magnetici a radiofrequenza
-
EN 61000-4-4: Transitori veloci
-
EN 61000-4-5: Transitori impulsivi
-
EN 61000-4-6: Disturbi condotti a radiofrequenza
-
Il prodotto risulta inoltre conforme alle seguenti normative:
-
EN 60529: Grado di protezione dell'involucro IP20
-
EN 60068-2-1: Test di resistenza al freddo
-
EN 60068-2-2: Test di resistenza al caldo secco
-
EN 60068-2-14: Test di resistenza al cambio di temperatura
-
EN 60068-2-30: Test di resistenza al caldo umido ciclico
-
EN 60068-2-6: Test di resistenza a vibrazioni sinusoidali
-
EN 60068-2-27: Test di resistenza a vibrazioni shock
-
EN 60068-2-64: Test di resistenza a vibrazioni random
-
1. Descrizione
l'RMC-1S è un modulo I/O remotato con protocollo di comunicazione in bus di campo CanOpen che, nella sua massima configurazione, può essere dotato di:
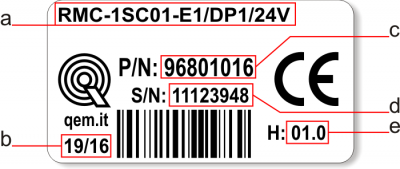
1.1 Identificazione del prodotto

In base al Codice d'ordinazione dello strumento è possibile ricavarne esattamente le caratteristiche.
Verificare che le Caratteristiche dello strumento corrispondano alle Vostre esigenze.1.2 Etichetta prodotto
-
a - Codice di ordinazione
-
b - Settimana di produzione: indica la settimana e l'anno di produzione
-
c - Part number: codice univoco che identifica un codice d'ordinazione
-
d - Serial number: numero di serie dello strumento, unico per ogni pezzo prodotto
-
e - Release hardware: release dell' hardware
1.3 Codice di ordinazione
Modello Caratteristiche RMC - 1S - C - 01 - E1 / MG2 MG2 = Tipo di versione hardware (vedi tabella) E1 = Tipo di espansione 01 = Versione firmware C = Ingombri esterni del modulo (dimensione pannello anteriore (213x125mm) 1S = Primo modello della versione “S” (Single Board) dei moduli remotati RMC = Famiglia moduli I/O remotati in CanOpen 1.3.1 Versioni hardware
Attualmente sono disponibili le seguenti versioni hardware:
Versioni hardware E1-DP1 E1-G12 E1-MG2 CAN1 PORT 1 1 1 Ingressi digitali standard 16 16 16 Ingressi digitali veloci per frequenzimetri - - - Ingressi analogici 12bit - 2 2 Ingressi analogici 16bit - - - Conteggi bidirezionali 20KHz ABZ
(24V-PP, 5V-LD)- - - Conteggi bidirezionali 200KHz ABZ
(24V-PP, 5V-LD)- - 2 Uscite digitali protette 16 16 16 Uscite analogiche 0-10V-12bit - - - Uscite analogiche +/-10V-16bit - 2 2 2. Caratteristiche tecniche
2.1 Caratteristiche generali
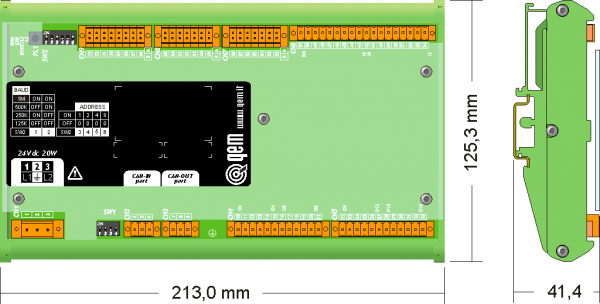
Peso (massima configurazione hardware) 500g Materiale contenitore PVC Led sistema 4 Led di diagnostica 32 Tasti sistema 1 Temperatura di esercizio 0 ÷ 50°C Umidità relativa 90% senza condensa Altitudine 0 - 2000m s.l.m. Temperatura di trasporto e stoccaggio -25 ÷ +70 °C Grado di protezione del pannello frontale IP20 2.2 Dimensioni meccaniche
Quote in mm
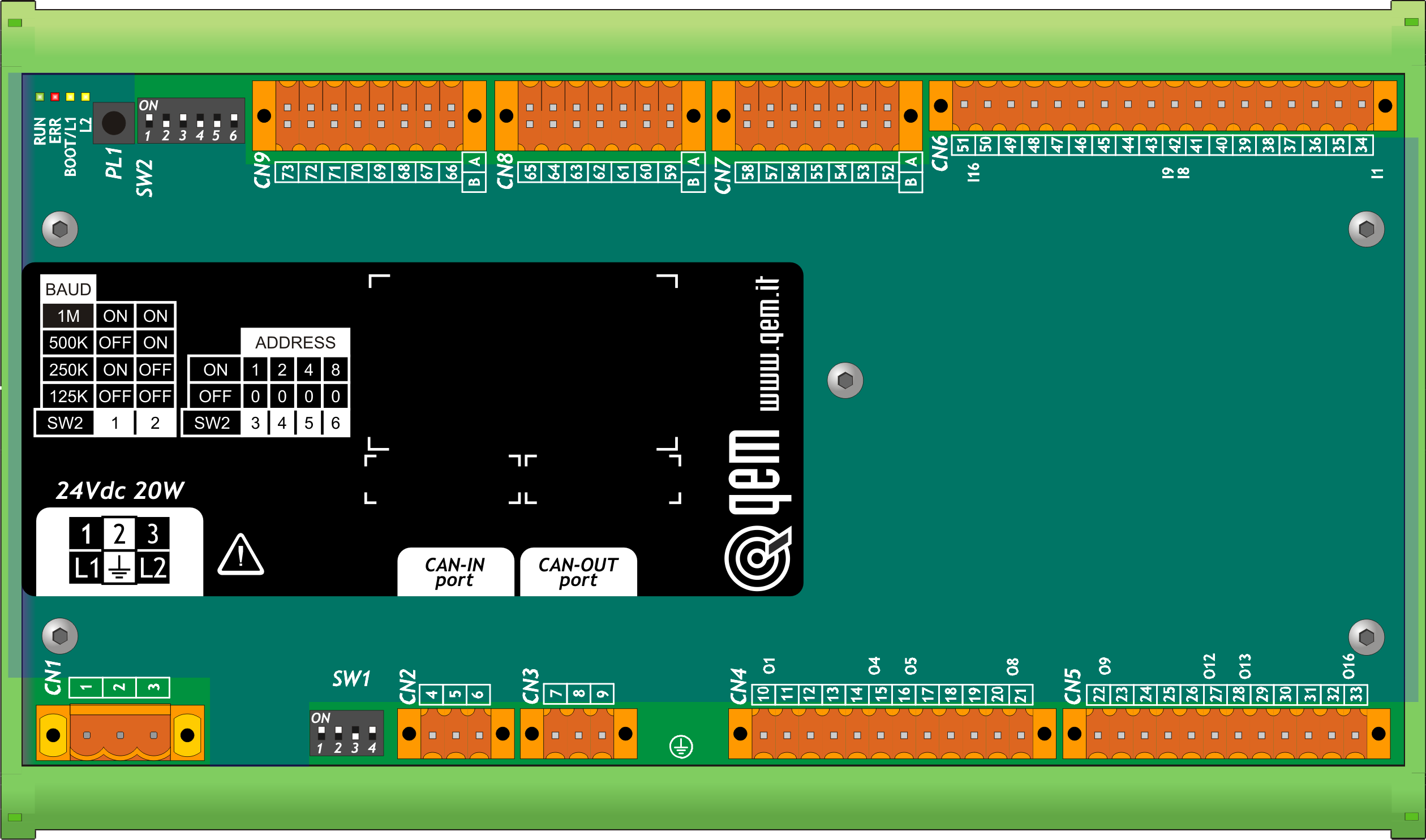
3. Collegamenti
Per informazioni riguardanti le sezioni dei cavi utilizzabili ed i connettori usati, consultare l'application note AN021
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamento
3.1 Power Supply
Il cablaggio deve essere eseguito da personale specializzato e dotato degli opportuni provvedimenti antistatici.
Prima di maneggiare lo strumento, togliere tensione e tutte le parti ad esso collegate.
Per garantire il rispetto delle normative CE, la tensione d'alimentazione deve avere un isolamento galvanico di almeno 1500 Vac..
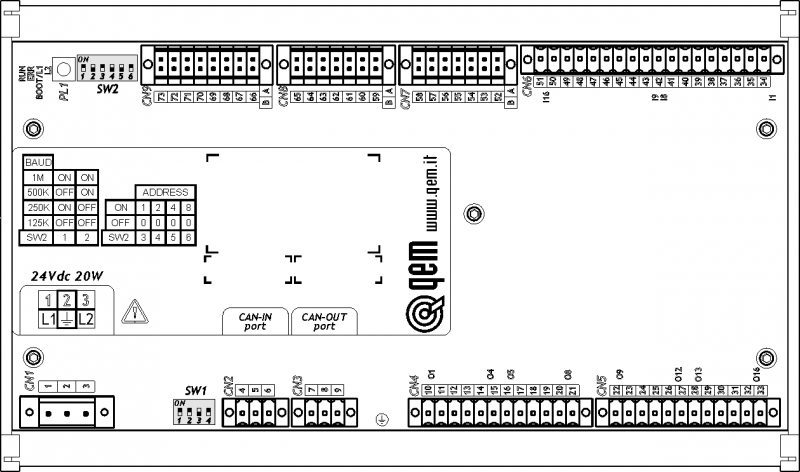
Alimentazioni disponibili 24 Vdc Range valido 22 ÷ 27 Vdc Assorbimento max. 5W Connettore
CN1 Morsetto Simbolo Descrizione 
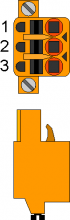
1 
0V alimentazione 2 TERRA Terra-PE (segnali) 3 
Positivo alimentazione Esempi di collegamento
Si prescrive l'uso di un alimentatore isolato con uscita 24Vdc +/-5% conforme a EN60950-1.
.
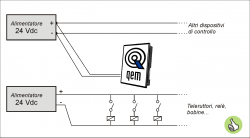
Usare due alimentatori separati: uno per la parte di controllo e uno per la parte di potenza 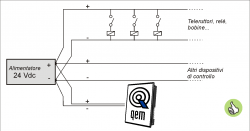
Nel caso di un unico alimentatore, usare due linee separate: una per il controllo e una per la potenza 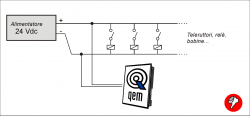
Non usare le stesse linee della parte di potenza 3.2 Collegamenti seriali
3.2.1 CANbus PORT
3.2.1.1 Connettori CAN-IN port
CN2 Morsetto Simbolo Descrizione 
1 (4) 0V Comune CAN 2 (5) CAN L Terminale CAN L 3 (6) CAN H Terminale CAN H 3.2.1.2 Connettori CAN-OUT port
CN3 Morsetto Simbolo Descrizione 1 (7) 0V Comune CAN 2 (8) CAN L Terminale CAN L 3 (9) CAN H Terminale CAN H .
Per il settaggio delle resistenze di terminazione e della velocità, vedere il paragrafo Settaggi, procedure e segnalazioni
3.3 Uscite digitali
CN4 Morsetto Simbolo Descrizione Indirizzo 
1 (10) V+ Ingresso alimentazione uscite (12÷28Vdc) 2 (11) O1 Uscita digitale 1 X.OUT01 3 (12) O2 Uscita digitale 2 X.OUT02 4 (13) O3 Uscita digitale 3 X.OUT03 5 (14) O4 Uscita digitale 4 X.OUT04 6 (15) V- Ingresso alimentazione uscite (12÷28Vdc) 7 (16) V+ Ingresso alimentazione uscite (12÷28Vdc) 8 (17) O5 Uscita digitale 5 X.OUT05 9 (18) O6 Uscita digitale 6 X.OUT06 10 (19) O7 Uscita digitale 7 X.OUT07 11 (20) O8 Uscita digitale 8 X.OUT08 12 (21) V- Ingresso alimentazione uscite (12÷28Vdc) .
CN5 Morsetto Simbolo Descrizione Indirizzo 1 (22) V+ Ingresso alimentazione uscite (12÷28Vdc) 2 (23) O9 Uscita digitale 9 X.OUT09 3 (24) O10 Uscita digitale 10 X.OUT10 4 (25) O11 Uscita digitale 11 X.OUT11 5 (26) O12 Uscita digitale 12 X.OUT12 6 (27) V- Ingresso alimentazione uscite (12÷28Vdc) 7 (28) V+ Ingresso alimentazione uscite (12÷28Vdc) 8 (29) O13 Uscita digitale 13 X.OUT13 9 (30) O14 Uscita digitale 14 X.OUT14 10 (31) O15 Uscita digitale 15 X.OUT15 11 (32) O16 Uscita digitale 16 X.OUT16 12 (33) V- Ingresso alimentazione uscite (12÷28Vdc) 3.4 Ingressi digitali
CN6 Morsetto Simbolo Descrizione Indirizzo 
1 (34) I1 Ingresso I1 X.INP01 2 (35) I2 Ingresso I2 X.INP02 3 (36) I3 Ingresso I3 X.INP03 4 (37) I4 Ingresso I4 X.INP04 5 (38) I5 Ingresso I5 X.INP05 6 (39) I6 Ingresso I6 X.INP06 7 (40) I7 Ingresso I7 X.INP07 8 (41) I8 Ingresso I8 X.INP08 9 (42) POL1 Polarizzatore 1 10 (43) I9 Ingresso I9 X.INP09 11 (44) I10 Ingresso I10 X.INP10 12 (45) I11 Ingresso I11 X.INP11 13 (46) I12 Ingresso I12 X.INP12 14 (47) I13 Ingresso I13 X.INP13 15 (48) I14 Ingresso I14 X.INP14 16 (49) I15 Ingresso I15 X.INP15 17 (50) I16 Ingresso I16 X.INP16 18 (51) POL2 Polarizzatore 2 .
Configurazione “NPN”:
Morsetto 9 = da cortocircuitare al +24 Volt
Morsetto 18 = da cortocircuitare al +24 VoltConfigurazione “PNP”:
Morsetto 9 = da cortocircuitare a 0 Volt
Morsetto 18 = da cortocircuitare a 0 Volt3.5 2 ingressi di conteggio bidirezionale a 200KHz
CN7 Morsetto Simbolo Descrizione Indirizzo 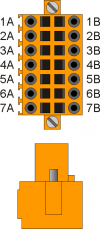
1A (52A) Internal bridge 1A -1B 2A (53A) PHA1 Fase A conteggio 1 PNP Push-Pull1) X.CNT01 3A (54A) PHB1 Fase B conteggio 1 4A (55A) Z1 Z conteggio 1 X.INP17 5A (56A) 0V Comune degli ingressi di conteggio 6A (57A) 0V 7A (58A) 0V 1B (52B) Internal bridge 1A -1B 2B (53B) PHA1+ + PHA conteggio 1 Line Driver X.CNT01 3B (54B) PHB1+ + PHB conteggio 1 4B (55B) Z1+ + Z conteggio 1 X.INP17 5B (56B) PHA1- - PHA conteggio 1 X.CNT01 6B (57B) PHB1- - PHB conteggio 1 7B (58B) Z1- - Z conteggio 1 X.INP17
1) Configurazione conteggio di tipo PNP/Push-Pull:
Morsetto 5B (56B): collegare al morsetto 5A (56A)
Morsetto 6B (57B): collegare al morsetto 6A (57A)
Morsetto 7B (58B): collegare al morsetto 7A (58A)CN8 Morsetto Simbolo Descrizione Indirizzo 1A (59A) Internal bridge 1A -1B 2A (60A) PHA2 Fase A conteggio 2 PNP Push-Pull1) X.CNT02 3A (61A) PHB2 Fase B conteggio 2 4A (62A) Z2 Z conteggio 2 X.INP18 5A (63A) 0V Comune degli ingressi di conteggio 6A (64A) 0V 7A (65A) 0V 1B (59B) Internal bridge 1A -1B 2B (60B) PHA2+ + PHA conteggio 2 Line Driver X.CNT02 3B (61B) PHB2+ + PHB conteggio 2 4B (62B) Z2+ + Z conteggio 2 X.INP18 5B (63B) PHA2- - PHA conteggio 2 X.CNT02 6B (64B) PHB2- - PHB conteggio 2 7B (65B) Z2- - Z conteggio 2 X.INP18
1) Configurazione conteggio di tipo PNP/Push-Pull:
Morsetto 5B (63B): collegare al morsetto 5A (63A)
Morsetto 6B (64B): collegare al morsetto 6A (64A)
Morsetto 7B (65B): collegare al morsetto 7A (65A)3.6 Uscite analogiche / Ingressi analogici
CN9 Morsetto Simbolo Descrizione Indirizzo 
1A (66A) AO1 Uscita analogica 1 X.AN01 2A (67A) GAO Comune uscite analogiche 3A (68A) n.c. 4A (69A) Vref 5A (70A) Sel.1 Corr. 1) 6A (71A) Sel.1 Volt 2) 7A (72A) IA1 Ingresso analogico 1 X.AI01 8A (73A) GAI Comune ingressi analogici 1B (66B) AO2 Uscita analogica 2 X.AN02 2B (67B) GAO Comune uscite analogiche 3B (68B) n.c. 4B (69B) Vref 5B (70B) Sel.2 Corr. 3) 6B (71B) Sel.2 Volt 4) 7B (72B) IA2 Ingresso analogico 2 X.AI02 8B (73B) GAI Comune ingressi analogici 4. Caratteristiche elettriche
Di seguito sono riportate le caratteristiche elettriche hardware.
I valori di frequenze massime e minime e tempi di acquisizione effettivi, possono comunque dipendere da eventuali filtri software aggiuntivi, vedere per esempio la variabile di sistema “QMOVE:sys004” nel paragrafo Variabili di sistema.4.1 CAN BUS
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio resistenze di terminazione
.
Velocità di comunicazione 125, 250, 500, 1000 Kbit/s Max. numero Driver/Receiver sulla linea 100 Max. lunghezza cavi 500m @ 125Kbit/s, 250m @ 250Kbit/s, 100m @ 500Kbit/s, 25m @ 1000Kbit/s Impedenza d'ingresso >15Kohm Limite corrente cortocircuito 45mA 


Esempio di collegamento CAN BUS.
Attenzione: chiudere i DIP JP1 e JP2 ed inserire le resistenze di terminazione (RL, RH) sull'ultimo dispositivo della catena.
4.2 Ingressi digitali
Tipo Sinking (PNP) Tempo min. di acquisizione (hardware) 3ms Tensione di funzionamento nominale 12÷24Vdc Tensione stato logico 0 0÷2 V Tensione stato logico 1 10,5 ÷ 26,5 V Corrente assorbita 2mA@10.5V / 8mA@26.5V 
4.3 Ingressi di conteggio bidirezionale a 200KHz
I valori riportati in tabella si riferiscono ai segnali d'ingresso A, B e Z.
Il valore di frequenza massima, riportato in tabella si riferisce a dei segnali delle fasi A e B con un DutyCycle = 50%
Con frequenze di conteggio superiori ai 50KHz è preferibile l'uso di encoder di tipo Line-Driver.Tipo di polarizzazione PNP/PP Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale 24Vdc Tensione stato logico 0 0 ÷ 2 V Tensione stato logico 1 10,5 ÷ 26,5 V Caduta di tensione interna 1,2V Resistenza di ingresso 3000Ω Line-Driver
Tipo di polarizzazione Line-Driver Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale (PHx+ ⇔ PHx-) 5Vdc Tensione stato logico 0 (PHx+ ⇔ PHx-) 0÷1,5 V Tensione stato logico 1 (PHx+ ⇔ PHx-) 2÷5 V Caduta di tensione interna 1,2V Resistenza di ingresso 150Ω 
4.3.1 Ingressi analogici potenziometrici
Tipo di collegamento Potenziometrico 1KΩ÷20KΩ Risoluzione 12bit/16bit Tensione di riferimento erogata 2,5Vdc Corrente massima erogata dal riferimento 10mA Resistenza d'ingresso 10MΩ Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Velocità di aggiornamento 1ms Isolamento 1000 Vrms 
4.3.2 Ingressi analogici voltmetrici
Tipo di collegamento Voltmetrico
0÷10VRisoluzione 12bit/16bit Resistenza d'ingresso (Rin) 20KΩ Valore di danneggiamento 20V Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Velocità di aggiornamento 1ms Isolamento 1000 Vrms 
4.3.3 Ingressi analogici amperometrici
Tipo di collegamento Amperometrico
(0-20 mA)Risoluzione 12bit/16bit Resistenza d'ingresso 125Ω Valore di danneggiamento 25 mA Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Velocità di aggiornamento 1ms Isolamento 1000 Vrms 
4.4 Uscite digitali protette
Carico commutabile Dc (PNP) Max. tensione di funzionamento 28V Isolamento 1000Vpp Caduta di tensione interna max. 600mV Resistenza interna massima @ON 90mΩ Corrente max. di protezione 12A Corrente max. di funzionamento 2A Corrente max. @OFF 5µA Tempo di massimo commutazione da ON a OFF 270µs Tempo di massimo commutazione da OFF a ON 250µs 
4.5 Uscite analogiche
Tipo di collegamento In modo comune Isolamento 1000Vrms Range di tensione (minimo a vuoto) -9,8V ÷ +9,8V Max. variazione offset in funzione della temperatura +/- 5mV Risoluzione 16bit Corrente massima 1mA Variazione dell'uscita in funzione del carico 100 µV/mA Resistenza d'uscita 249Ω 
5. Settaggi, procedure e segnalazioni
5.1 IMPOSTAZIONE DEI DIP-SWITCH
5.1.1 Settaggio resistenze di terminazione
Impostazione resistenze di terminazione per la linea Canbus.
SW1 Nr. Dip Impostazione dei DIP Funzione 
1 / Nessuna 2 / 3 ON Resistenze inserite 4 ON 5.1.2 DIP-SWITCH SW2
Descrizione funzionalità
Nr. DIP Funzione Selezione della velocità di trasmissione del Canbus 1 OFF ON OFF ON 2 OFF OFF ON ON Baud-Rate ? 125Kb 250Kb 500Kb 1Mb Selezione dell'indirizzo del modulo Canbus slave 3 OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON 4 OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON 5 OFF OFF OFF OFF ON ON ON ON OFF OFF OFF OFF ON ON ON ON 6 OFF OFF OFF OFF OFF OFF OFF OFF ON ON ON ON ON ON ON ON ID ? 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 5.1.3 Pulsante PL1
Descrizione funzionamento
PL1 BOOT Se si tiene premuto il pulsante BOOT durante l'accensione dello strumento, si accede alla funzione di “aggiornamento firmware” dello strumento. 6. Informazioni per la programmazione
6.1 Dichiarazione
Per utilizzare questo modulo remoto è necessario dichiararlo nell'apposita sezione BUS del QView. Dopo averla dichiarata è possibile accedere agli ingressi ed uscite come se fossero un'estensione del PLC stesso.
BUS 1 <nome PLC> <versione firmware> 2 <scheda base> . 3 <scheda espansione> . 4 C401A . ;Primo RMC-1S 5 C401A . ;Secondo RMC-1S
Un esempio di dichiarazione del BUS di un J1P20 con firmware 30 senza scheda di espansione con collegati due moduli I/O remoti (RMC-1S):
BUS 1 1P20F 30 2 1MD1F . 3 . . 4 C401A . ;Primo RMC-1S 5 C401A . ;Secondo RMC-1S
Ovviamente la versione firmware deve coincidere e, se presente, il nome della scheda di espansione allo slot 3 deve essere corretto.
6.2 Utilizzo delle variabili
Sulla base dell'esempio precedente si indica la dichiarazione del primo ingresso per ogni dispositivo
INPUT ifInp1P201 F 2.INP01 ;Primo ingresso del P20 ;<nome var> F 3. .... Eventuale I/O sulla scheda di espansione ifInp1RMC1 F 4.INP01 ;Primo ingresso del primo RMC-1S ifInp1RMC2 F 5.INP01 ;Primo ingresso del secondo RMC-1S
Per utilizzare
fare riferimento alla dichiarazione indicata sotto la voce indirizzo nelle tabelle linkate qui sopra sostituendo la X con il numero all'inizio della riga nella sezione BUS con cui si vuole indicare il dispositivo (vedasi esempio qui sopra).
-
-