Questa è una vecchia versione del documento!
~~BOZZA~~
P1P20F - 002 : Setup - Tarature - Funzionamento
Informazioni
Release
Il presente documento è valido integralmente salvo errori od omissioni.
| Release | Descrizione | Data |
|---|---|---|
| 1.0 | Nuovo manuale. | 14/02/17 |
Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
-
Microsoft® e MS-DOS® sono marchi registrati e Windows® è un marchio della Microsoft Corporation.
Descrizione
La applicazione P1P20F - 003, installata nell'hardware Qmove J1-P20-FY20, è un controllore per il posizionamento di un asse analogico e controllo di massimo 7 teste di punzonatura e taglio, con gestione della pressa con avviamento continuo e singolo. E' implementato inoltre un algoritmo di riordino quote. I parametri che determinano il modo di funzionamento sono accessibili solo all'installatore mediante l'introduzione di una password.
Nel resto del documento sarà nostra cura distinguere tra le caratteristiche standard disponibili subito e le caratteristiche sviluppabili in futuro e opzionali.
Caratteristiche implementate nella attuale proposta
-
Controllo di 1 asse tramite analogica +/-10Vdc
-
Gestione di due moduli I/O tramite CANopen
-
Gestione di più liveli di accesso con password per operatore, manutentore e installatore
-
Gestione programmi di lavoro identificati da numero e nome
-
Funzionalità touchscreen per introduzioni dati e azioni tramite bottoni
-
Messaggistica di supporto all'operatore
-
Messaggistica di allarme
-
Pagine di diagnostica
-
Algoritmo per il riordino delle quote di programma
-
Gestione di segnali per una pressa
Barra di comando
La barra posta in alto su ogni pagina fornisce le seguenti informazioni:

oppure

- Stato della macchina
- Nome della pagina
- Lingua in uso
- Eventuali comandi di passaggio di pagina
- Tasto di ritorno alla pagina principale
- Tasto di ingresso in menu
Stato macchina
Gli stati macchina sono i seguenti:
- ![]() : macchina in inizializzazione - recupero dei dati
: macchina in inizializzazione - recupero dei dati
- ![]() : macchina in manuale
: macchina in manuale
- ![]() : macchina in setup - calibrazione
: macchina in setup - calibrazione
- ![]() : macchina in inserimento ricetta
: macchina in inserimento ricetta
- ![]() : macchina in automatico - ciclo automatico fermo
: macchina in automatico - ciclo automatico fermo
- ![]() : macchina in automatico - ciclo automatico in corso
: macchina in automatico - ciclo automatico in corso
- ![]() : macchina in allarme
: macchina in allarme
Tasti utilizzati
I tasti utilizzabili su ogni pagina sono abilitati e illuminati in verde. i tasti in grigio sono disabilitati.
- ![]() : ritorno alla pagina principale
: ritorno alla pagina principale
- ![]() : ritorno alla pagina precedente
: ritorno alla pagina precedente
- ![]() : passaggio alla pagina successiva
: passaggio alla pagina successiva
- ![]() : accesso alla pagina di menu
: accesso alla pagina di menu
- Premendo sulla bandiera della lingua in uso si passa alla pagina di scelta lingua. Attualmente le lingue implementate sono
ITALIANO
INGLESE
Menu principale
Premere il tasto ![]() per accedere al menu principale:
per accedere al menu principale:
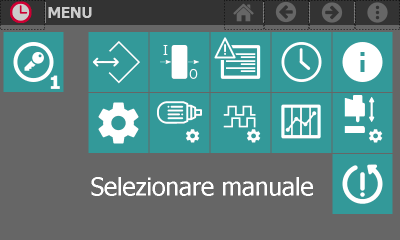
-  : passaggio alla pagina di cambio livello di accesso
: passaggio alla pagina di cambio livello di accesso
-  : passaggio alla sezione di creazione / scelta ricetta
: passaggio alla sezione di creazione / scelta ricetta
-  : passaggio alla sezione di diagnostica I/O
: passaggio alla sezione di diagnostica I/O
-  : passaggio alla pagina degli allarmi
: passaggio alla pagina degli allarmi
-  : passaggio alla pagina di impostazione data e ora
: passaggio alla pagina di impostazione data e ora
-  : passaggio alla pagina di info sistema
: passaggio alla pagina di info sistema
-  : passaggio alla sezione di setup generico
: passaggio alla sezione di setup generico
-  : passaggio alla sezione di setup dati dell'asse
: passaggio alla sezione di setup dati dell'asse
-  : passaggio alla sezione di calibrazione dell'asse
: passaggio alla sezione di calibrazione dell'asse
-  : passaggio alla sezione di taratura del PID
: passaggio alla sezione di taratura del PID
-  : passaggio alla sezione di setup della lavorazione
: passaggio alla sezione di setup della lavorazione
-  : passaggio alla sezione di forzatura dati di fabbrica (default)
: passaggio alla sezione di forzatura dati di fabbrica (default)
Livelli di accesso
A seconda del livello di accesso, chi utilizza le varie sezioni del menu ha la possibilità di accedere a differenti funzionalità:
LIVELLO OPERATORE
- E' possibile accedere senza restrizioni alle sezioni di menu di programmazione ricette, diagnostica, allarmi, impostazione data e ora e info sistema
- E' possibile accedere alle sezioni di setup ma i dati contenuti sono in sola lettura
- Non è visibile l'accesso al reset di fabbrica
LIVELLO MANUTENTORE

- E' possibile accedere senza restrizioni alle sezioni di menu di programmazione ricette, diagnostica, allarmi, impostazione data e ora e info sistema
- E' possibile accedere senza restrizioni alle sezioni di setup
- Non è visibile l'accesso al reset di fabbrica
LIVELLO INSTALLATORE

- E' possibile accedere senza restrizioni alle sezioni di menu di programmazione ricette, diagnostica, allarmi, impostazione data e ora e info sistema
- E' possibile accedere senza restrizioni alle sezioni di setup
- E' visibile e permesso l'accesso al reset di fabbrica
N.B. : Le password di accesso saranno rùfornite da QEM srl a chi costruirà della macchina, oppure a chi eseguirà l'intervento di messa in servizio o di manutenzione.
Messa in servizio
Salvataggio ed uscita
Le pagine di setup sono dotate di un proprio menu:
- Premere il tasto ![]()

I comandi disponibili sono:
- Salva ed esci : i valori di setup impostati vengono salvati nella memoria interna e messi in esecuzione. Si ritorna alla pagina principale.
- Ricarica i valori : i valori di setup inseriti non vengono salvati e sono ricaricati i valori presenti nella memoria interna. Si rimane nella stessa pagina.
- Esci senza salvare : i valori di setup inseriti non vengono salvati e sono ricaricati i valori presenti nella memoria interna. Si ritorna alla pagina principale.
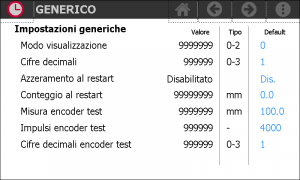
Setup generico
Per accedere, dalla pagina di MENU PRINCIPALE premere il tasto
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Modo visualizzazione | - | 0 | 0 ÷ 2 | 0: Visualizzazione normale 1: L'HDR è attivo, nella fascia centrale fra due unità 2: L'HDR è attivo su tutto il range del conteggio |
| Cifre decimali | - | 1 | 0 ÷ 3 | E' la posizione del punto decimale nelle visualizzazioni delle quote dell'asse. |
| Azzeramento al restart | - | 0 | Disabilitato ÷ Abilitato | Abilitazione dell'azzeramento del conteggio all'attivazione dell'ingresso I4 (restart) |
| Conteggio al restart | mm | 0 | -999999 ÷ 999999 | Valore che viene caricato nel conteggio dell'asse, se abilitata la funzione di Azzeramento al restart |
| Misura encoder test | mm | 100.0 | 0 ÷ 999999 | Indica lo spazio, in unità di misura, percorso dall'encoder di test per ottenere gli impulsi encoder * 4 impostati sul parametro Impulsi encoder test. |
| Impulsi encoder test | - | 4000 | 0 ÷ 999999 | Indica gli impulsi moltiplicato 4 forniti dall'encoder di test per ottenere lo spazio impostato nel parametro Misura encoder test. Il rapporto tra Misura e Impulsi è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935. |
| Cifre decimali encoder test | - | 1 | 0 ÷ 3 | E' la posizione del punto decimale nelle visualizzazioni delle quote dell'encoder di test. |
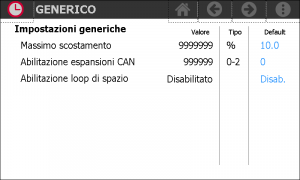
| Massimo scostamento | % | 10.0 | 0 ÷ 100.0 | E' la massima differenza in percentuale consentita tra il contatore di misura e quelo di test, oltre la quale viene diseccitata l'uscita di allarme O8. |
| Abilitazione espansioni CAN | - | 0 | 0 ÷ 2 | 0: Non è installata alcuna espansione per gli utensili 1: E' installata l'espansione per i primi 16 utensili 2: Sono installate le espansioni per 32 utensili |
| Abilitazione loop di spazio | - | 0 | Disabilitato ÷ Abilitato | Scelta se abilitare il controllo di spazio anche con asse fermo. Con asse in movimento è sempre abilitato. |
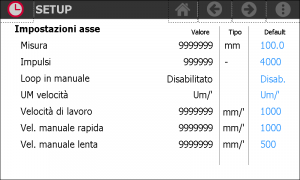
Setup dell'asse
Per accedere, dalla pagina di MENU PRINCIPALE premere il tasto

| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Misura | mm | 100.0 | 0 ÷ 999999 | Indica lo spazio, in unità di misura, percorso dall'encoder dell'asse per ottenere gli impulsi encoder * 4 impostati sul parametro Impulsi. |
| Impulsi | - | 4000 | 0 ÷ 999999 | Indica gli impulsi moltiplicato 4 forniti dall'encoder dell'asse per ottenere lo spazio impostato nel parametro Misura. Il rapporto tra Misura e Impulsi è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935. |
| Loop in manuale | - | 0 | Disabilitato ÷ Abilitato | Scelta se abilitare il controllo di spazio nello stato di manuale, quindi durante i movimenti in jog. |
| UM velocità | - | 0 | Um/' ÷ Um/s | Specifica l'unità di misura della velocità: Um/': velocità in Um al minuto Um/s: velocità in Um al secondo |
| Velocità di lavoro | UM | 1000 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i posizionamenti alle quote di lavoro. Il valore è riferito all'unità di misura impostata. |
| Vel. manuale rapida | UM | 1000 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i movimenti in jog manuale con il selettore su RAPIDO. Il valore è riferito all'unità di misura impostata. |
| Vel. manuale lenta | UM | 500 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i movimenti in jog manuale con il selettore su LENTO. Il valore è riferito all'unità di misura impostata. |
| Accelerazione | s | 1.0 | 0 ÷ 999.0 | Rampa di accelerazione dell'asse. E' il tempo impiegato dall'asse per portarsi da fermo alla velocità massima. |
| Decelerazione | s | 1.0 | 0 ÷ 999.0 | Rampa di decelerazione dell'asse. E' il tempo impiegato dall'asse per decelerare dalla velocità massima a zero. |
| Tolleranza | mm | 0 | 0 ÷ 9999 | E' la fascia di conteggio attorno alla quota di posizionamento che identifica se il posizionamento è stato concluso correttamente. |
| Ritardo tolleranza | s | 0.2 | 0 ÷ 999.0 | E' il tempo di ritardo dell'inizio della procedura di attivazione delle teste quando l'asse è entrato nella fascia di tolleranza. |
| Timer inversione | s | 0.1 | 0 ÷ 999.0 | E' il minimo tempo che deve trascorrere tra due movimenti dell'asse in direzioni opposte. |
| Controllo ingresso blocco | - | 3 | 0 ÷ 99 | E' il numero di volte che il controllo testa l'ingresso di blocco conteggio per stabilire se è stato attivato o meno. Ogni unità vale 2 ms. |
Calibrazione dell'asse
Per accedere, dalla pagina di MENU PRINCIPALE premere il tasto
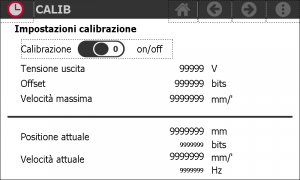
In questa pagina è possibile:
- Trovare il valore di offset per compensare la deriva del drive
- Trovare la velocità massima corrispondente ai 10 Vdc
N.B. : il controllo deve essere nello stato di manuale (I5 = OFF) e con il drive abilitato (I3 = ON)
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Offset | bit | 0 | -99999 ÷ 99999 | Definisce il valore in bit della correzione relativa all'uscita analogica in modo da compensare l'eventuale deriva del sistema. |
| Velocità massima | UM | 2000 | 0 ÷ 999999 | Definisce la massima velocità dell'asse relativa al riferimento analogico +/- 10Vdc. |
Verifica dei collegamenti
- Verificare per prima cosa l'esatta connessione della dinamo tachimetrica del drive o delle fasi dell'encoder
- Abilitare la calibrazione toccando l'apposito selettore 
- Inserire un valore basso (es. 0.5) su Tensione uscita e osservare se il motore gira circa ad 1/20 della sua velocità massima
- Fornendo una tensione positiva il motore dovrà girare verso “avanti” con una velocità proporzionale al valore introdotto e il conteggio visualizzato su Posizione attuale dovrà incrementarsi
N.B. : Il valore introdotto su Tensione uscita viene fornito senza rampe di accelerazione o decelerazione.
Taratura dell'offset
- Abilitare la calibrazione toccando l'apposito selettore
- Inserire un valore su Offset in modo da compensare la deriva del motore quando non è abilitata la reazione di spazio
Calcolo della velocità massima
Lo strumento è ora in grado di calcolare e visualizzare il valore di velocità massima da introdurre nell'apposito parametro.
- Abilitare la calibrazione toccando l'apposito selettore
- Inserire un valore su Tensione uscita e leggere la velocità con la quale si muove il motore su Velocità attuale
- Calcolare la velocità che si ottiene se si rapporta la velocità letta con i 10Vdc di fondo scala. Ad esempio se si inserisce 1 Vdc , la velocità massima sarà (Velocità attuale x 10)
- Inserire il risultato del calcolo in Velocità massima
N.B. : Il valore introdotto su Tensione uscita viene fornito senza rampe di accelerazione o decelerazione.
Introduzione di un valore nel conteggio
In questa pagina è possibile introdurre un valore nel campo Posizione attuale
Taratura del PID
Per accedere, dalla pagina di MENU PRINCIPALE premere il tasto
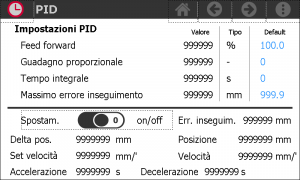
In questa pagina è possibile trovare i valori del P.I.D. dell'asse, tramite dei movimenti avanti / indietro su delle quote e con velocità di test.
N.B. : il controllo deve essere nello stato di manuale (I5 = OFF) e con il drive abilitato (I3 = ON)
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Feed forward | % | 100.0 | 0 ÷ 200.0 | E' il coefficiente percentuale che, moltiplicato per la velocità, genera la parte FF dell'uscita di regolazione. |
| Guadagno proporzionale | - | 0 | 0 ÷ 32767 | E' il coefficiente che, moltiplicato per l'errore di inseguimento, genera la parte proporzionale P dell'uscita di regolazione. |
| Tempo integrale | - | 0 | 0 ÷ 32767 | E' il tempo, espresso in ms, che produce il coefficiente di integrazione dell'errore di inseguimento. Tale valore genera la parte integrale I dell'uscita di regolazione. |
| Massimo errore di inseguimento | mm | 999.9 | 0 ÷ 999999 | Definisce il massimo scostamento accettabile tra la posizione teorica e la posizione reale dell'asse. |
Movimento di test
I movimenti avanti e indietro, che l'asse compie durante la procedura di taratura del PID, servono a poter variare al volo i vari coefficienti per trovare la taratura più adatta.
- Impostare i seguenti parametri:
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Delta pos. | mm | 0 | 0 ÷ 999999 | E' il delta di posizione che l'asse compie durante i movimenti di test. |
| Set velocità | UM | 0 | 0 ÷ 999999 | E' la velocità di spostamento dell'asse durante i movimenti di test. |
| Accelerazione | s | 0 | 0 ÷ 999 | E' la rampa di accelerazione utilizzata dall'asse durante i movimenti di test. |
| Decelerazione | s | 0 | 0 ÷ 999 | E' la rampa di decelerazione utilizzata dall'asse durante i movimenti di test. |
- Attivare i movimenti di test toccando l'apposito selettore
Durante i movimenti è possibile leggere in tempo reale:
- la posizione attuale
- la velocità attuale
- l'errore di inseguimento attuale
- Per disattivare i movimenti di test toccare l'apposito selettore
- l'uscita dalla pagina comporta la disattivazione automatica
Consigli sulla taratura
- Partire con un valore di Guadagno proporzionale molto basso. Inizialmente l'asse è molto lento, non vengono rispettate le rampe di accelerazione e decelerazione, non viene raggiunta la velocità massima e la posizione; significa che il valore è troppo basso. Aumentare il valore finché il sistema è dinamicamente soddisfacente, senza però diventare instabile (pendolazioni con asse in movimento e vibrazioni ad asse fermo)
- Partire con un valore di Feed forward di 100.0 %. Il valore deve essere aumentato se l'errore di inseguimento è positivo quando l'asse va avanti; allo stesso modo va aumentato se l'errore è negativo quando l'asse va indietro. Al contrario, deve essere diminuito se l'errore è negativo quando l'asse va avanti; allo stesso modo va diminuito sel'errore è positivo quando l'asse va verso indietro.
- Se necessario, partire con valore di base di 0.5 s di Tempo integrale, calare gradualmente il tempo finché non si arriva ad un valore grazie al quale l'asse migliora le proprie prestazioni dinamiche rimanendo stabile. Valori troppi alti o troppo bassi possono causare delle pendolazioni. Impostando 0 la funzione è esclusa.
Setup della lavorazione
Per accedere, dalla pagina di MENU PRINCIPALE premere il tasto

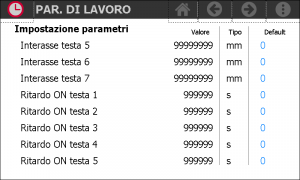
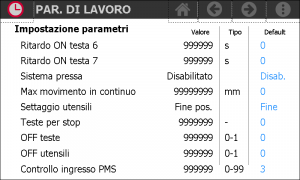
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| Misura | mm | 100.0 | 0 ÷ 999999 | Indica lo spazio, in unità di misura, percorso dall'encoder dell'asse per ottenere gli impulsi encoder * 4 impostati sul parametro Impulsi. |
| Impulsi | - | 4000 | 0 ÷ 999999 | Indica gli impulsi moltiplicato 4 forniti dall'encoder dell'asse per ottenere lo spazio impostato nel parametro Misura. Il rapporto tra Misura e Impulsi è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935. |
| Loop in manuale | - | 0 | Disabilitato ÷ Abilitato | Scelta se abilitare il controllo di spazio nello stato di manuale, quindi durante i movimenti in jog. |
| UM velocità | - | 0 | Um/' ÷ Um/s | Specifica l'unità di misura della velocità: Um/': velocità in Um al minuto Um/s: velocità in Um al secondo |
| Velocità di lavoro | UM | 1000 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i posizionamenti alle quote di lavoro. Il valore è riferito all'unità di misura impostata. |
| Vel. manuale rapida | UM | 1000 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i movimenti in jog manuale con il selettore su RAPIDO. Il valore è riferito all'unità di misura impostata. |
| Vel. manuale lenta | UM | 500 | 0 ÷ 999999 | Velocità dell'asse utilizzata durante i movimenti in jog manuale con il selettore su LENTO. Il valore è riferito all'unità di misura impostata. |
| Accelerazione | s | 1.0 | 0 ÷ 999.0 | Rampa di accelerazione dell'asse. E' il tempo impiegato dall'asse per portarsi da fermo alla velocità massima. |
| Decelerazione | s | 1.0 | 0 ÷ 999.0 | Rampa di decelerazione dell'asse. E' il tempo impiegato dall'asse per decelerare dalla velocità massima a zero. |
| Tolleranza | mm | 0 | 0 ÷ 9999 | E' la fascia di conteggio attorno alla quota di posizionamento che identifica se il posizionamento è stato concluso correttamente. |
| Ritardo tolleranza | s | 0.2 | 0 ÷ 999.0 | E' il tempo di ritardo dell'inizio della procedura di attivazione delle teste quando l'asse è entrato nella fascia di tolleranza. |
| Timer inversione | s | 0.1 | 0 ÷ 999.0 | E' il minimo tempo che deve trascorrere tra due movimenti dell'asse in direzioni opposte. |
| Controllo ingresso blocco | - | 3 | 0 ÷ 99 | E' il numero di volte che il controllo testa l'ingresso di blocco conteggio per stabilire se è stato attivato o meno. Ogni unità vale 2 ms. |