Indice
J1-P20-Fx


Indice
1. Informazioni
| Documento: | MIMJ1P20Fx | ||
|---|---|---|---|
| Descrizione: | Manuale di installazione e manutenzione | ||
| Redattore: | Riccardo Furlato | ||
| Approvatore | Gabriele Bazzi | ||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/qmoveplus/j1p20/mimj1p20fx | ||
| Lingua: | Italiano | ||
| Release documento | Descrizione | Note | Data |
| 01 | Nuovo manuale | 05/06/2014 | |
L'apparecchiatura è stata progettata per l'impiego in ambiente industriale in conformità alla direttiva 2004/108/CE.
-
EN 61000-6-4: Compatibilità elettromagnetica - Norma generica sull'emissione in ambiente industriale
-
EN55011 Class A: Limiti e metodi di misura
-
EN 61000-6-2: Compatibilità elettromagnetica - Norma generica sull'immunità negli ambienti industriali
-
EN 61000-4-2: Compatibilità elettromagnetica - Immunità alle scariche elettrostatiche
-
EN 61000-4-3: Immunità ai campi magnetici a radiofrequenza
-
EN 61000-4-4: Transitori veloci
-
EN 61000-4-5: Transitori impulsivi
-
EN 61000-4-6: Disturbi condotti a radiofrequenza
-
Il prodotto risulta inoltre conforme alle seguenti normative:
-
EN 60529: Grado di protezione dell'involucro IP20
-
EN 60068-2-1: Test di resistenza al freddo
-
EN 60068-2-2: Test di resistenza al caldo secco
-
EN 60068-2-14: Test di resistenza al cambio di temperatura
-
EN 60068-2-30: Test di resistenza al caldo umido ciclico
-
EN 60068-2-6: Test di resistenza a vibrazioni sinusoidali
-
EN 60068-2-27: Test di resistenza a vibrazioni shock
-
EN 60068-2-64: Test di resistenza a vibrazioni random
-
2. Descrizione
J1-P20-F è un controllore integrato della gamma Qmove+ che, nella sua massima configurazione, può essere dotato di:
Dotazione di serie 
Display lcd grafico 5” TFT-256 COLORI-800x480px 
Touch Screen Panel resistivo 
1 seriale di programmazione PROG PORT (Usare in abbinamento all'accessorio IQ009) 
1 lettore Memory Card MMC/SD 
7 led di segnalazione 4 led di sistema 
Morsetti a molla anti-vibranti 
Orologio calendario 
Film anteriore intercambiabile 
Tasti funzione personalizzabili 
16 ingressi digitali 24V - PNP 
16 uscite digitali PNP 500mA Dotazione opzionale (Consultare la tabella Versioni hardware) 
1 seriale multistandard (RS232/422/485) - USER PORT 
1 porta CANbus 
Protocollo di comunicazione CANopen 
1 porta ETHERNET 8 ingressi digitali 24V - PNP 
2 conteggi bidirezionali LD/PP 8 uscite digitali PNP 500mA 
2 uscite analogiche +/-10V 16bit 2.1 Identificazione del prodotto
In base al Codice d'ordinazione dello strumento è possibile ricavarne esattamente le caratteristiche. Verificare che le Caratteristiche dello strumento corrispondano alle Vostre esigenze.
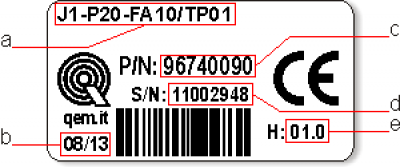
2.2 Etichetta prodotto
-
a - Codice di ordinazione
-
b - Settimana di produzione: indica la settimana e l'anno di produzione
-
c - Part number: codice univoco che identifica un codice d'ordinazione
-
d - Serial number: numero di serie dello strumento, unico per ogni pezzo prodotto
-
e - Release hardware: release dell' hardware
2.3 Codice di ordinazione
Modello Caratteristiche J1 - P20 - FA - 10 / TP01 TP00 = Codice tastiera (TP00 = pannello con touch-screen resistivo, logo e tasti funzione personalizzabili);
TP01 = pannello con touch-screen resistivo, logo e tasti funzione standard QEM10 = Versione firmware (00 = non installato) F = Livello tecnologico
A = Versione hardwareP = Solo Tasti funzione
2 = display lcd grafico 5” TFT-256 COLORI-800x480px; dimensione pannello anteriore (168x144mm); tastiera 7 tasti + 11 led; contenitore a norme DIN 43700;
0 = Corrispondenza firmware-hardwareJ1 = Famiglia Qmove “HMI+PLC” 2.3.1 Versioni hardware
Attualmente sono disponibili le seguenti versioni hardware:
Versioni hardware A B C D E F G H I J K L M N P W Y Z SLOT 2
(Scheda base)USER PORT (RS232-422-485) - - - - - - - 1 - 1 - - - - - 1 1 1 CAN PORT - - - 1 1 1 1 1 1 1 1 1 - 1 - 1 1 1 ETHERNET PORT - - - - - - - 1 1 - 1 1 1 1 1 1 1 1 Ingressi digitali standard 16 16 16 16 16 16 16 16 16 16 16 16 16 16 16 - 16 16 Ingressi digitali veloci (possono essere utilizzati come frequenzimetri) - 2 2 - 2 2 2 2 - - 2 2 - - 2 - 2 2 Conteggi bidirezionali 200KHz ABZ (24V-PP, 5V-LD) - 2 2 - 2 2 2 2 - - 2 2 - - 2 - 2 2 Uscite digitali protette 16 16 16 16 16 16 16 16 16 16 16 16 16 16 16 - 16 16 Uscite analogiche 0-10V-12bit - - - - - - - - - - - - - - - - - - Uscite analogiche +/-10V-16bit - - 2 - - 2 - 2 - - - 2 - - 2 - 2 2 Codice software della scheda da dichiarare nello SLOT 2 1MD1F SLOT 3
(Schede di
specializzazione)Ingressi digitali standard - - - - - - 8 8 - - - - 8 8 - - - 8 Ingressi analogici 12bit - - - - - - - - - - - - - - - - - Ingressi analogici 16bit selez.(0-10V, 0-20mA, potenz, termocoppie, PT100) - - - - - - - - - - - 2 - - - - - 2 Uscite digitali protette - - - - - - 8 8 - - - - 8 8 - - - 8 Uscite digitali a relè - - - - - - - - - - - - - - - - - - Uscite analogiche 0-10V-12bit - - - - - - - - - - - - - - - - - - Uscite analogiche +/-10V-16bit - - - - - - - - - - - - - - - - - - AUX PORT (RS485) - - - - - - - - - - - - - - - - - - Codice software della scheda da dichiarare nello SLOT 3 - - - - - - 
- - - - - - 2.3.2 Versioni firmware
Versione Descrizione 10 Completamente programmabile, con funzionalità PLC 20 Completamente programmabile, con funzionalità PLC e MOTION 30 Completamente programmabile, con funzionalità PLC, MOTION, CAMMING e INTERPOLAZIONE Per ulteriori informazioni riguardo alle caratteristiche dei vari firmware, consultare la tabella dei Devices abilitati negli strumenti.
2.4 Conformazione prodotto
2.4.1 Pannello anteriore
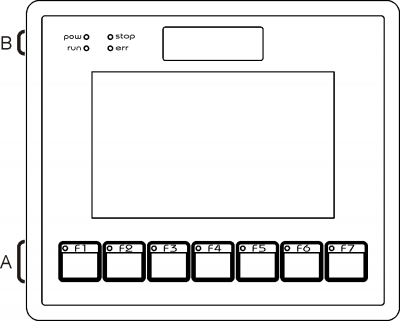
A) Tasti funzione e led
B) Led di sistema
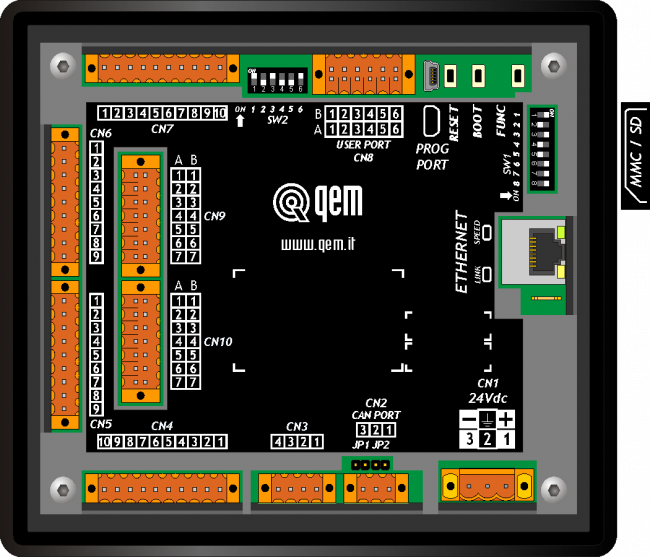
2.4.2 Morsettiere posteriori
Il J1-P20-F viene configurato con una scheda di specializzazione inserita nello slot 3.
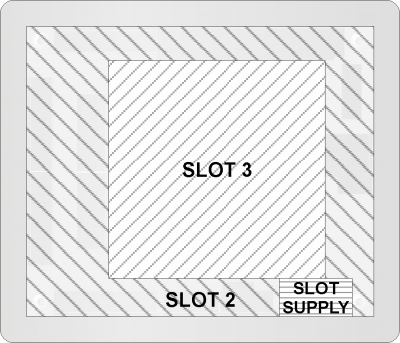
Slot Descrizione Slot Supply Connettore di alimentazione posto sulla scheda Base Slot 2 Scheda Base Slot 3 Schede Espansione 3. Caratteristiche tecniche
3.1 Caratteristiche generali
Peso (massima configurazione hardware) 1Kg Materiale contenitore Lamiera Materiale pannello frontale Alluminio Materiale cornice Noryl autoestinguente Display LCD 5'' TFT 256 colori - 800 x 480px Touch screen Resistivo a 4 fili Area display / diagonale 108 x 64,8mm / 5“ Led utente 7 Led sistema 4 Tasti funzione 7 Tasti sistema 3 Temperatura di esercizio 0 ÷ 50°C Temperatura di trasporto e stoccaggio -25 ÷ +70 °C Umidità relativa 90% senza condensa Altitudine 0 - 2000m s.l.m. Grado di protezione del pannello frontale IP64 3.2 CPU (livello tecnologico F)
Microprocessore RISC (32 bit) Frequenza di lavoro 200MHz RAM 8MB Flash 8MB Per maggiori informazioni sull'utilizzo della memoria consultare le Memorie utilizzate
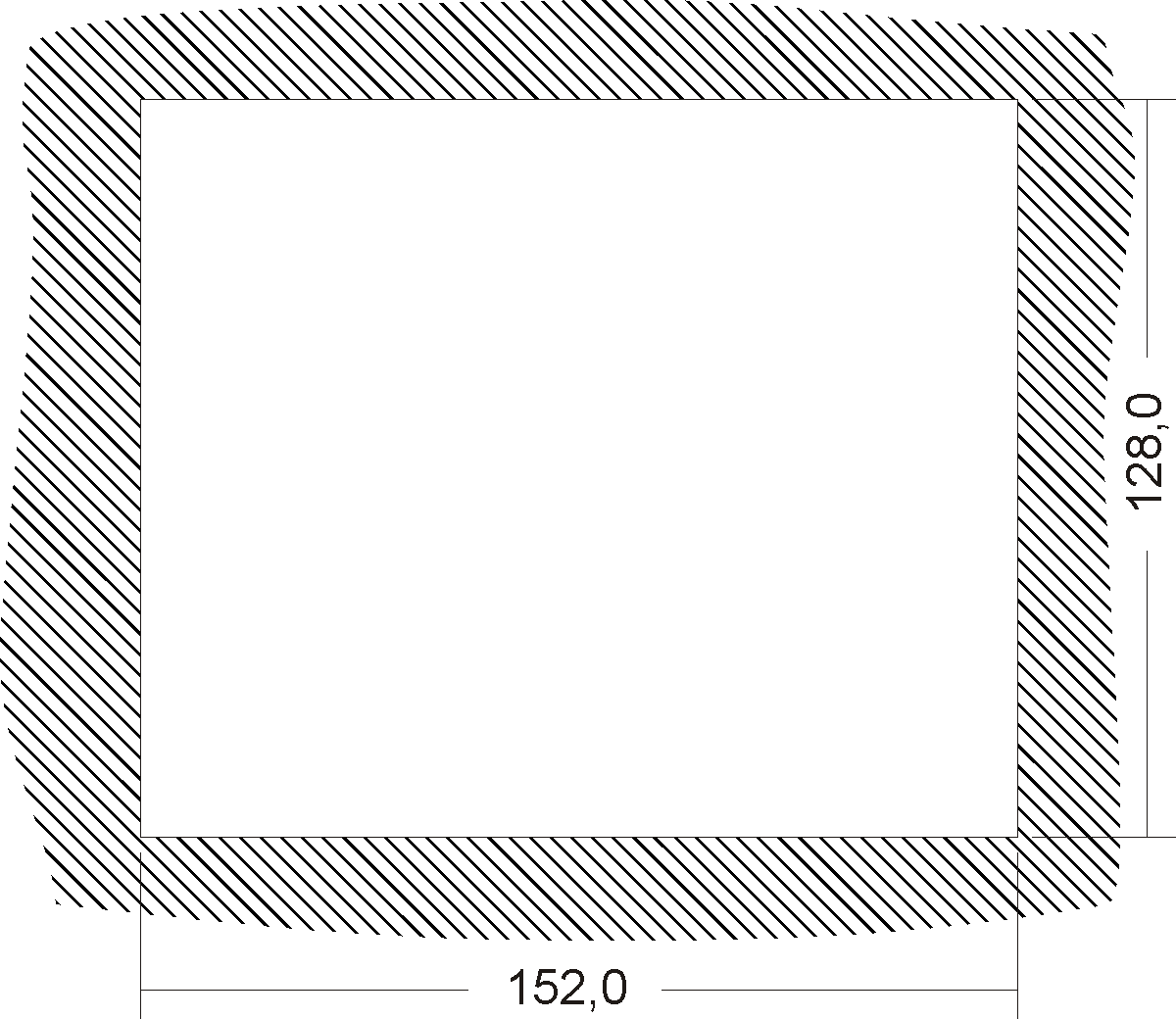
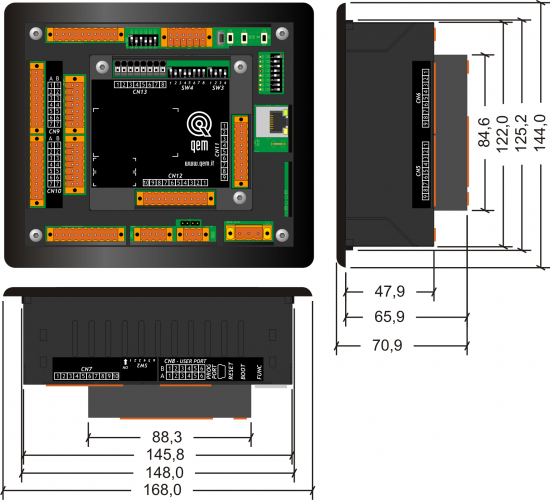
3.3 Dimensioni meccaniche
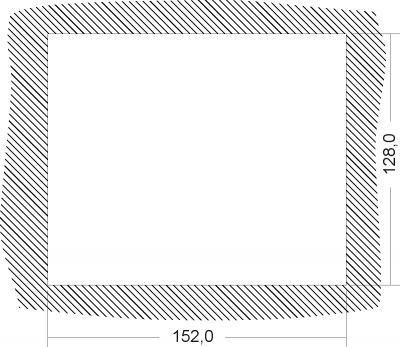
Quote in mm.
3.4 Dima di foratura
3.5 Installazione
Inserire lo strumento nel foro.
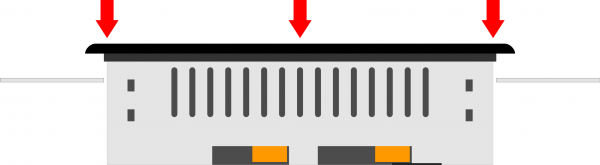
Applicare gli agganci.

Prima di fissare lo strumento, bisogna accertarsi che sia bene inserito all'interno del foro nel pannello, e che la guarnizione posta sulla parte posteriore della cornice sia ben aderente al pannello.
Questo eviterà infiltrazioni di liquidi all'interno del pannello e deformazioni della cornice.Avvitare come indicato, per fissare lo strumento.

Attenzione: dopo aver appoggiato il perno dell'aggancio al pannello, effettuare solo mezza rotazione per non strappare la cornice!

• Leggere attentamente.
• Vedi note tecniche riguardanti i morsetti Weidmuller BLZF, BLZ e B2L.Famiglia Sezione filo
senza puntaliniSezione filo
con puntaliniCaratteristiche
contatto
BLZF 3.50 0,3÷1,50 mm2 0,3÷1 mm2 

B2L 3.50 0,3÷1,00 mm2 0,3÷0,5 mm2 
B2CF 3.50 0,14÷1,50 mm2 0,14÷1,50 mm2 
BLZF 5.08 0,3÷2,50 mm2 0,3÷2,00 mm2 
BLF 5.00 0,2÷2,50 mm2 0,3÷2,00 mm2 
BLZ 5.00 0,2÷2,50 mm2 0,1÷1 mm2 

Per un cablaggio più sicuro, si consiglia l'uso di puntalini Utensili
Puntalini
Sezione filo Sezione puntalino Marca Modello 0,1÷0,3 mm2 0,95 mm2 Cembre PKE 308 0,3÷0,5 mm2 1,32 mm2 Cembre PKE 508 BM BM00601 1 mm2 2,5mm2 BM00603 PK 108 BM BM00603 Pinza per il crimpaggio dei puntalini
Modello: “Cembre ND#4 cod. 2590086”
Cacciaviti
Cacciavite per morsetti a molla autobloccante:
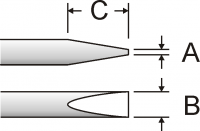
Cacciavite a lama piatta secondo DIN 5264-A.
A = 0,6mm
B = 2,5mm max
C = 7 mm minCacciavite per morsetti a vite
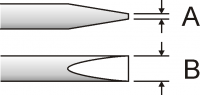
Cacciavite a lama piatta secondo DIN 5264. Coppia di serraggio: 0,4 ÷ 0,5 Nm.
A = 0,6mm
B = 3,5mmProcedura
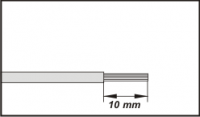
Scoprire il rame del filo per 10mm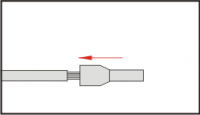
Inserire il puntalino e stringerlo con l'apposita pinza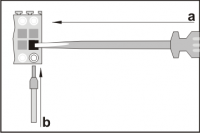
a) inserire il cacciavite senza ruotarlo
b) inserire il puntalino nel morsetto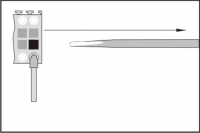
Estrarre il cacciavite4. Collegamenti
4.1 Power supply
-
Il cablaggio deve essere eseguito da personale specializzato e dotato degli opportuni provvedimenti antistatici.
-
Prima di maneggiare lo strumento, togliere tensione e tutte le parti ad esso collegate.
-
Per garantire il rispetto delle normative CE, la tensione d'alimentazione deve avere un isolamento galvanico di almeno 1500 Vac.
Alimentazioni disponibili 24 Vdc Range valido 22 ÷ 27 Vdc Assorbimento max. 30W 4.1.1 Connettore
CN1 Morsetto Simbolo Descrizione 

1 
Positivo alimentazione DC 2 TERRA Terra-PE (segnali) 3 
0V alimentazione DC 4.1.2 Esempi di collegamento alimentazione
4.1.2.1 Esempi di collegamento per l'alimentazione a 24Vdc
Si prescrive l'uso di un alimentatore isolato con uscita 24Vdc +/-5% conforme a EN60950-1.
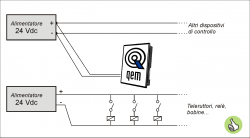
Usare due alimentatori separati: uno per la parte di controllo e uno per la parte di potenza
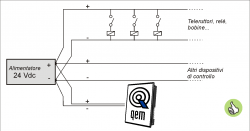
Nel caso di un unico alimentatore, usare due linee separate: una per il controllo e una per la potenza
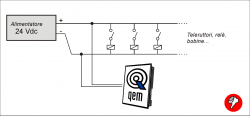
Non usare le stesse linee della parte di potenza
4.2 Connettori scheda 1MD1F
4.2.1 Collegamenti seriali
4.2.1.1 PROG PORT (USB mini-B)
4.2.1.2 USER PORT
Connettore
CN8 Morsetto RS232 RS422 RS485 Descrizione 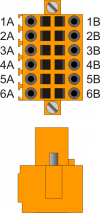
1A - - A Terminale A - RS485 2A - - B Terminale B - RS485 3A 0V 0V 0V Comune USER PORT 4A 0V 0V 0V Comune USER PORT 5A TX - - Terminale TX - RS232 6A Terra 1B - RX - Terminale RX - RS422 2B - RXN - Terminale RX N - RS422 3B - TX - Terminale TX - RS422 4B - TXN - Terminale TX N - RS422 5B RX - - Terminale RX - RS232 6B Terra Settaggio standard elettrico
4.2.1.3 CANbus PORT
Connettori CANbus PORT
CN2 Morsetto Simbolo Descrizione 
1 CAN H Terminale CAN H 2 CAN L Terminale CAN L 3 0V Comune CAN Settaggio resistenze di terminazione CANbus PORT
Nome
jumperImpostazione Funzione 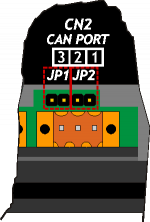
JP1 INSERITO Terminazione CAN attivata JP2 4.2.1.4 ETHERNET port
ETHERNET PORT Descrizione 
Connettore RJ45.
LED:
* LINK: led verde = cavo collegato (il led acceso indica che il cavo è connesso ad entrambi i capi)
* DATA: led giallo = scambio dati (il led lampeggiante indica lo scambio dati tra i dispositivi collegati)MMC/SD
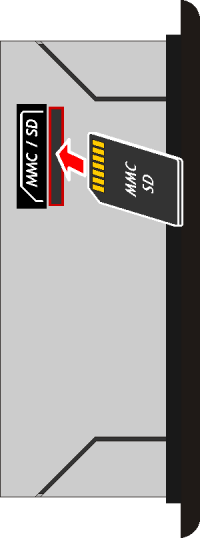 Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
Connettore per l'inserimento della Memory card (evidenziato dalla freccia)
4.2.2 Ingressi digitali
4.2.2.1 16 ingressi digitali PNP
CN6 Morsetto Simbolo Descrizione Indirizzo 
1 0V Comune degli ingressi digitali 2 I1 Ingresso I1 2.INP01 3 I2 Ingresso I2 2.INP02 4 I3 Ingresso I3 2.INP03 5 I4 Ingresso I4 2.INP04 6 I5 Ingresso I5 2.INP05 7 I6 Ingresso I6 2.INP06 8 I7 Ingresso I7 2.INP07 9 I8 Ingresso I8 2.INP08 .
CN5 Morsetto Simbolo Descrizione Indirizzo 1 0V Comune degli ingressi digitali 2 I9 Ingresso I9 2.INP09 3 I10 Ingresso I10 2.INP10 4 I11 Ingresso I11 2.INP11 5 I12 Ingresso I12 2.INP12 6 I13 Ingresso I13 2.INP13 7 I14 Ingresso I14 2.INP14 8 I15 Ingresso I15 2.INP15 9 I16 Ingresso I16 2.INP16 4.2.2.2 2 ingressi di conteggio bidirezionale a 200KHz
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamento.
CN9 Morsetto Simbolo Descrizione Indirizzo 
1A Uscita +24V dc1) 2A PHA1 Fase A Conteggio 1
PNP / Push-Pull2)2.INP17 2.CNT01 3A PHB1 Fase B 2.INP18 4A Z1 Z 1.INT01 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Uscita +24V dc3) 2B PHA1+ + PHA Conteggio 1
Line Driver2.INP17 2.CNT01 3B PHB1+ + PHB 2.INP18 4B Z1+ + Z 1.INT01 5B PHA1- - PHA 6B PHB1- - PHB 7B Z1- - Z
2) Configurazione conteggio di tipo PNP/Push-Pull:
Morsetto 5B: collegare al morsetto 5A
Morsetto 6B: collegare al morsetto 6A
Morsetto 7B: collegare al morsetto 7ACN10 Morsetto Simbolo Descrizione Indirizzo 1A Uscita +24V dc1) 2A PHA2 Fase A Conteggio 2
PNP / Push-Pull2)2.INP19 2.CNT02 3A PHB2 Fase B 2.INP20 4A Z2 Z 1.INT02 5A 0V Comune degli ingressi di conteggio 6A 0V 7A 0V 1B Uscita +24V dc3) 2B PHA2+ + PHA Conteggio 2
Line Driver2.INP19 2.CNT02 3B PHB2+ + PHB 2.INP20 4B Z2+ + Z 1.INT02 5B PHA2- - PHA 6B PHB2- - PHB 7B Z2- - Z
2) Configurazione conteggio di tipo PNP/Push-Pull:
Morsetto 5B: collegare al morsetto 5A
Morsetto 6B: collegare al morsetto 6A
Morsetto 7B: collegare al morsetto 7A4.2.3 Uscite digitali
4.2.3.1 16 uscite protette
CN7 Morsetto Simbolo Descrizione Indirizzo 
1 V+ Ingresso alimentazione uscite O1÷O4 (12÷28V dc) 2 O1 Uscita digitale 1 2.OUT01 3 O2 Uscita digitale 2 2.OUT02 4 O3 Uscita digitale 3 2.OUT03 5 O4 Uscita digitale 4 2.OUT04 6 V+ Ingresso alimentazione uscite O5÷O8(12÷28V dc) 7 O5 Uscita digitale 5 2.OUT05 8 O6 Uscita digitale 6 2.OUT06 9 O7 Uscita digitale 7 2.OUT07 10 O8 Uscita digitale 8 2.OUT08 11 V- Ingresso alimentazione uscite (0V dc) .
CN4 Morsetto Simbolo Descrizione Indirizzo 1 V+ Ingresso alimentazione uscite O9÷O12(12÷28V dc) 2 O9 Uscita digitale 9 2.OUT09 3 O10 Uscita digitale 10 2.OUT10 4 O11 Uscita digitale 11 2.OUT11 5 O12 Uscita digitale 12 2.OUT12 6 V+ Ingresso alimentazione uscite O13÷O16(12÷28V dc) 7 O13 Uscita digitale 13 2.OUT13 8 O14 Uscita digitale 14 2.OUT14 9 O15 Uscita digitale 15 2.OUT15 10 O16 Uscita digitale 16 2.OUT16 11 V- Ingresso alimentazione uscite (0V dc) 4.2.4 Uscite analogiche
2 uscite analogiche +/-10V, 16bit
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN3 Morsetto Simbolo Descrizione Indirizzo 
1 GAO Comune uscite analogiche 2 AO1 Uscita analogica 1 2.AN01 3 AO2 Uscita analogica 2 2.AN02 4 GAO Comune uscite analogiche 4.3 Connettori scheda 1AD2F

4.3.1 Ingressi digitali
8 ingressi digitali
CN11 Morsetto Simbolo Descrizione Indirizzo 
9 0V Comune degli ingressi digitali 8 I17 Ingresso I17 3.INP01 7 I18 Ingresso I18 3.INP02 6 I19 Ingresso I19 3.INP03 5 I20 Ingresso I20 3.INP04 4 I21 Ingresso I21 3.INP05 3 I22 Ingresso I22 3.INP06 2 I23 Ingresso I23 3.INP07 1 I24 Ingresso I24 3.INP08 4.3.2 Ingressi analogici
2 ingressi analogici multistandard
CN13 Morsetto Simbolo Descrizione Indirizzo 
1 GAI Comune ingressi analogici 2 VREF Tensione di riferimento 1) 3 AI1_A Ingresso analogico 1 3.AI01 4 AI1_B 5 AI1_C 6 AI2_A Ingresso analogico 2 3.AI02 7 AI2_B 8 AI2_C
1) Per ingressi potenziomentriciSettaggio degli ingressi analogici
Num.
DipIngresso analogico 1 Ingresso analogico 2 PT100 Termocoppia Pot. 0-10V 0-20mA PT100 Termocoppia Pot. 0-10V 0-20mA SW4

1 ON X OFF OFF OFF X X X X X 2 OFF X ON ON ON X X X X X 3 X X X X X ON X OFF OFF OFF 4 X X X X X OFF X ON ON ON 5 ON ON OFF OFF OFF X X X X X 6 OFF OFF ON ON ON X X X X X 7 OFF ON X X X X X X X X 8 X X X X X OFF ON X X X SW3

1 X X OFF OFF ON X X X X X 2 X X OFF ON OFF X X X X X 3 X X X X X X X OFF OFF ON 4 X X X X X X X OFF ON OFF X = settaggio ininfluente
Pot. = ingresso di tipo potenziometrico4.3.3 Uscite digitali
8 uscite digitali protette
Le caratteristiche elettriche sono riportate nel paragrafo Caratteristiche elettriche.
Gli esempi di collegamento sono riportati nel paragrafo Esempi di collegamentoCN12 Morsetto Simbolo Descrizione Indirizzo 
1 V+ Ingresso alimentazione uscite (12÷28V dc) 2 O17 Uscita digitale 17 3.OUT01 3 O18 Uscita digitale 18 3.OUT02 4 O19 Uscita digitale 19 3.OUT03 5 O20 Uscita digitale 20 3.OUT04 6 O21 Uscita digitale 21 3.OUT05 7 O22 Uscita digitale 22 3.OUT06 8 O23 Uscita digitale 23 3.OUT07 9 O24 Uscita digitale 24 3.OUT08 10 V- Ingresso alimentazione uscite (0V dc) 5. Caratteristiche elettriche
Di seguito sono riportate le caratteristiche elettriche hardware.
I valori di frequenze massime e minime e tempi di acquisizione effettivi, possono comunque dipendere da eventuali filtri software aggiuntivi, vedere per esempio la variabile di sistema “QMOVE:sys004” nel paragrafo Variabili di sistema.5.1 PROG PORT (USB mini-B)
Il connettore USB mini-B non supporta gli standard elettrici USB, deve essere utilizzato solamente mediante una interfaccia IQ009 o IQ013.
Utilizzata per il trasferimento e il debugging del programma applicativo nella CPU.
Standard elettrico TTL (Usare l'interfaccia seriale IQ009 o IQ013) Velocità di comunicazione Min. 9,6 Kbaud - max 115200 Kbaud
settabile tramite i dip1 e 2 dello switch SW1Isolamento Nessuno .



Collegamento tra Qmove+ e PC, con l'ausilio dell'accessorio IQ009 .


Collegamento tra Qmove+ e un dispositivo dotato di seriale RS232 (per esempio un MODEM),
con l'ausilio dell'interfaccia IQ0135.2 RS232
Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Riferito a 0V Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 15 m Impedenza d'ingresso > 3 Kohm Limite corrente cortocircuito 7 mA 

5.3 RS422
Velocità di comunicazione 4800, 9600, 19200, 38400, 57600, 115200 baud Modalità di comunicazione Full duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 1 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 


5.4 RS485
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio standard elettrico USER PORT, Settaggio standard elettrico AUX1 PORT o Settaggio resistenze di polarizzazione e terminazione AUX2 PORT
.
Velocità di comunicazione 4800 baud (solo se utilizzata con device SERCOM e/o MODBUS),
9600 baud, 19200 baud, 38400 baud, 57600 baudModalità di comunicazione Half duplex Modo di funzionamento Differenziale Max. numero di dispositivi connessi sulla linea 32 Max. lunghezza cavi 1200 m Impedenza d'ingresso > 12 Kohm Limite corrente cortocircuito 35 mA 

5.5 CAN BUS
Per attivare la resistenza di terminazione interna vedere paragrafo Settaggio resistenze di terminazione
.
Velocità di comunicazione 125, 250, 500, 1000 Kbit/s Max. numero Driver/Receiver sulla linea 100 Max. lunghezza cavi 500m @ 125Kbit/s, 250m @ 250Kbit/s, 100m @ 500Kbit/s, 25m @ 1000Kbit/s Impedenza d'ingresso >15Kohm Limite corrente cortocircuito 45mA 


Esempio di collegamento CAN BUS.
Attenzione: chiudere i DIP JP1 e JP2 ed inserire le resistenze di terminazione (RL, RH) sull'ultimo dispositivo della catena.
5.6 ETHERNET
Interfaccia Ethernet 10/100 Base T (IEEE 802.3) su connettore RJ45.
Collegamento tra Qmove+ e PC:

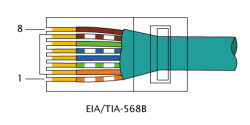
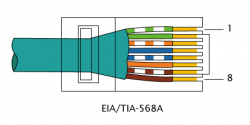
Qmove+ Cavo cross-over EIA/TIA-568A/B PC 5.7 MMC/SD
Tipo Memory Card da utilizzare MMC, SD e SDHC fino a 8GB
Per un corretto funzionamento è necessario che il dispositivo sia conforme agli standard definiti da “SD Association” (www.sdcard.org) oppure da “Multi Media Card Association” (www.mmca.org).Per essere utilizzate le Memory Card devono essere preventivamente formattate con file system FAT16 o FAT32.
5.8 Ingressi digitali standard
Tipo Sinking (PNP) Tempo min. di acquisizione (hardware) 3ms Tensione di funzionamento nominale 12÷24Vdc Tensione stato logico 0 0÷2 V Tensione stato logico 1 10,5 ÷ 26,5 V Corrente assorbita 2mA@10.5V / 8mA@26.5V 
5.9 Ingressi di conteggio bidirezionale a 200KHz
I valori riportati in tabella si riferiscono ai segnali d'ingresso A, B e Z.
Il valore di frequenza massima, riportato in tabella si riferisce a dei segnali delle fasi A e B con un DutyCycle = 50%
Con frequenze di conteggio superiori ai 50KHz è preferibile l'uso di encoder di tipo Line-Driver.Tipo di polarizzazione PNP/PP Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale 24Vdc Tensione stato logico 0 0 ÷ 2 V Tensione stato logico 1 10,5 ÷ 26,5 V Caduta di tensione interna 1,2V Resistenza di ingresso 3000Ω Line-Driver
Tipo di polarizzazione Line-Driver Frequenza massima 200KHz Tempo min. di acquisizione 5µs Isolamento 1000Vrms Tensione di funzionamento nominale (PHx+ ⇔ PHx-) 5Vdc Tensione stato logico 0 (PHx+ ⇔ PHx-) 0÷1,5 V Tensione stato logico 1 (PHx+ ⇔ PHx-) 2÷5 V Caduta di tensione interna 1,2V Resistenza di ingresso 150Ω 
5.10 Ingressi analogici
Le caratteristiche elettriche dipendono dal tipologia di ingresso configurabile tramite dip-switch. I tempi di conversione da analogico a digitale dipendono dalla confugurazione secondo la seguente tabella:
Analog inputs configuration Conversion Time
per channelInput 1 Input 2 DC1) - 4.6 mS - DC 4.6 mS DC DC 9.3 mS DC TC 9.3 mS DC PT100 79.1 mS TC - 9.3 mS - TC 9.3 mS TC DC 9.3 mS TC TC 9.3 mS TC PT100 83.8 mS PT100 - 74.5 mS - PT100 74.5 mS PT100 DC 79.1 mS PT100 TC 79.1 mS PT100 PT100 791 mS 5.10.1 Ingresso analogico in configurazione amperometrica 0-20mA
Tipo di collegamento Amperometrico
(0-20 mA)Risoluzione 12bit/16bit2) Resistenza d'ingresso 125Ω Valore di danneggiamento 25 mA Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Tempo di conversione Dipende dalla configurazione dell'ingresso analogico.
Vedi paragrafo Tempi di conversione se presente 3)Isolamento 1000 Vrms
1) amperometrico, voltmetrico, potenziometrico2) Dipende dalle Versioni hardware3) Il tempo di campionamento del device deve essere uguale o superiore al tempo di conversione
5.10.2 Ingresso analogico in configurazione potenziometrica
Tipo di collegamento Potenziometrico 1KΩ÷20KΩ Risoluzione 12bit/16bit1) Tensione di riferimento erogata 2,5Vdc Corrente massima erogata dal riferimento 10mA Resistenza d'ingresso 10MΩ Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Tempo di conversione Dipende dalla configurazione dell'ingresso analogico.
Vedi paragrafo Tempi di conversione se presente 2)Isolamento 1000 Vrms
1) Dipende dalle Versioni hardware2) Il tempo di campionamento del device deve essere uguale o superiore al tempo di conversione
5.10.3 Ingresso analogico in configurazione volmetrica
Tipo di collegamento Voltmetrico
0÷10VRisoluzione 12bit/16bit1) Resistenza d'ingresso (Rin) 40KΩ Valore di danneggiamento 20V Max. errore di linearità + 0,1% Vfs Max. errore di offset + 0,1% Vfs S.n. 71 dB Tempo di conversione Dipende dalla configurazione dell'ingresso analogico.
Vedi paragrafo Tempi di conversione se presente 2)Isolamento 1000 Vrms
1) Dipende dalle Versioni hardware2) Il tempo di campionamento del device deve essere uguale o superiore al tempo di conversione
5.10.4 Ingresso analogico in configurazione PT100
Tipo di sensore
collegabilePT100 3 fili 1) Tipo di misura Resistenza 2) Risoluzione 15 bit (32767 corrisponde a 250.00 Ω) Resistenza d'ingresso (Rin) 15 MΩ Corrente di misura 1 mA Valore di danneggiamento 10V Accuratezza misura
resistenza± 0,04% Velocità di aggiornamento min 4.6 ms per canale3) Isolamento 1000 Vrms
1) collegabili anche a 2 fili con ponticello sui morsetti2) temperatura calcolabile via software3) valore dipendente dalla configurazione degli ingressi stessi. Vedi tabella tempi di conversione .5.10.5 Ingresso analogico in configurazione Termocoppia
Tipo di sensore
collegabileTermocoppia tipo J,K,R,S,B,N,T,E 1) 
Tipo di misura Tensione differenziale Risoluzione 16 bit Range di misura ±156.25 mV Misura temperatura
per compensazione
giunto freddointegrata Resistenza d'ingresso (Rin) 15 MΩ Valore di danneggiamento 30V Accuratezza misura ± 0,2% (esclusa compensazione giunto freddo) Velocità di aggiornamento min 4.6 ms per canale2) Isolamento 1000 Vrms
1) solo J e K supportate dal SW. Contattare QEM per il supporto degli altri tipi di sensore.2) valore dipendente dalla configurazione degli ingressi stessi. Vedi tabella tempi di conversione .5.11 Uscite digitali protette
Tipo Sourcing (PNP) Max. tensione di funzionamento 28V Caduta di tensione interna max. 600mV Corrente massima 500mA Tempo di massimo commutazione da ON a OFF 270µs Tempo di massimo commutazione da OFF a ON 250µs 
5.12 Uscite analogiche
Tipo di collegamento In modo comune Isolamento 1000Vrms Range di tensione (minimo a vuoto) -9,8V ÷ +9,8V Max. variazione offset in funzione della temperatura +/- 5mV Risoluzione 16bit Corrente massima 1mA Variazione dell'uscita in funzione del carico 100 µV/mA Resistenza d'uscita 249Ω 
6. Esempi di collegamento
6.1 CANbus

-
Sul primo (1) e sull'ultimo (3) dispositivo della catena, devono essere inserite le resistenze di terminazione.
-
La calza dei cavi deve essere connessa a terra tramite gli appositi faston presenti sulla carcassa metallica.
-
Per attivare la resistenza di terminazione interna vedere paragrafo “Resistenze di terminazione CAN”
6.2 Ingressi digitali

6.3 Ingressi di conteggio Line Driver

6.4 Ingressi di conteggio PNP / Push Pull

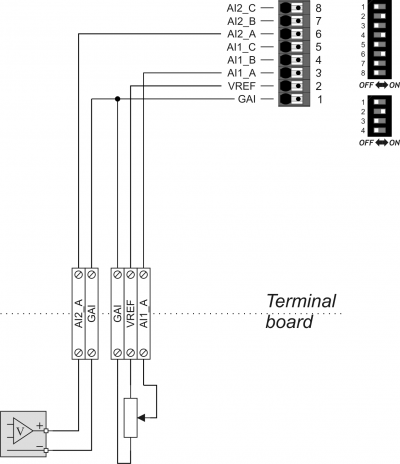
6.5 Ingressi analogici
6.5.1 Ingresso 1 potenziometrico e ingresso 2 voltmetrico
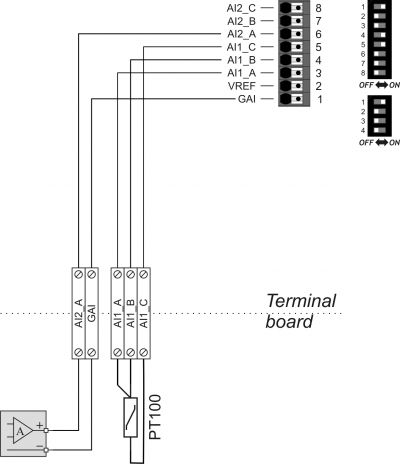
6.5.2 Ingresso 1 per PT100 e ingresso 2 amperometrico
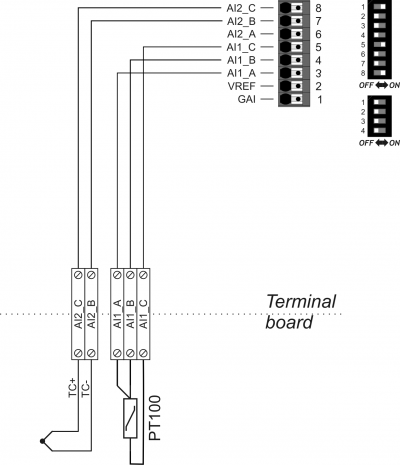
6.5.3 Ingresso 1 per PT100 e ingresso 2 per termocoppie
6.6 Uscite digitali protette

6.7 Uscite analogiche

7. Settaggi, procedure e segnalazioni
SW1 Dip Impostazione dei DIP Funzione 
1 OFF OFF ON ON Selezione velocità di trasmissione PROG PORT 2 OFF ON OFF ON Baud-rate
38400Baud-rate
115200Baud-rate
19200Baud-rate
576003 OFF OFF ON ON Selezione velocità di trasmissione USER PORT 4 OFF ON OFF ON Baud-rate
38400Baud-rate
115200Baud-rate
19200Baud-rate
576005 Selettore baud-rate CANbus. Vedere paragrafo Selettore baud-rate CANbus 6 OFF ON Selezione modo di funzionamento PROG PORT PROG PORT utilizzabile anche dai device SERCOM e MODBUS PROG PORT non utilizzabile dai device SERCOM e MODBUS 7 Selettore baud-rate CANbus. Vedere paragrafo Selettore baud-rate CANbus 8 OFF ON Seleziona la USER PORT come PROG PORT1) PROG PORT normale PROG PORT sul connettore della USER PORT
1) E' possibile usare il connettore della USER PORT come PROG PORT con standard elettrico RS232, così facendo il connettore mini-USB della PROG PORT viene scollegato (Settaggio standard elettrico USER PORT). Per questo funzionamento è necessario anche che il dip 6 di SW2 sia OFF.SW1 Dip Impostazione dei DIP Funzione 1 - - 2 - - 3 - - 4 - - 5 OFF ON OFF ON Selezione velocità di
trasmissione CANbus7 OFF OFF ON ON Baud-rate
125KB/SBaud-rate
250KB/SBaud-rate
500KB/SBaud-rate
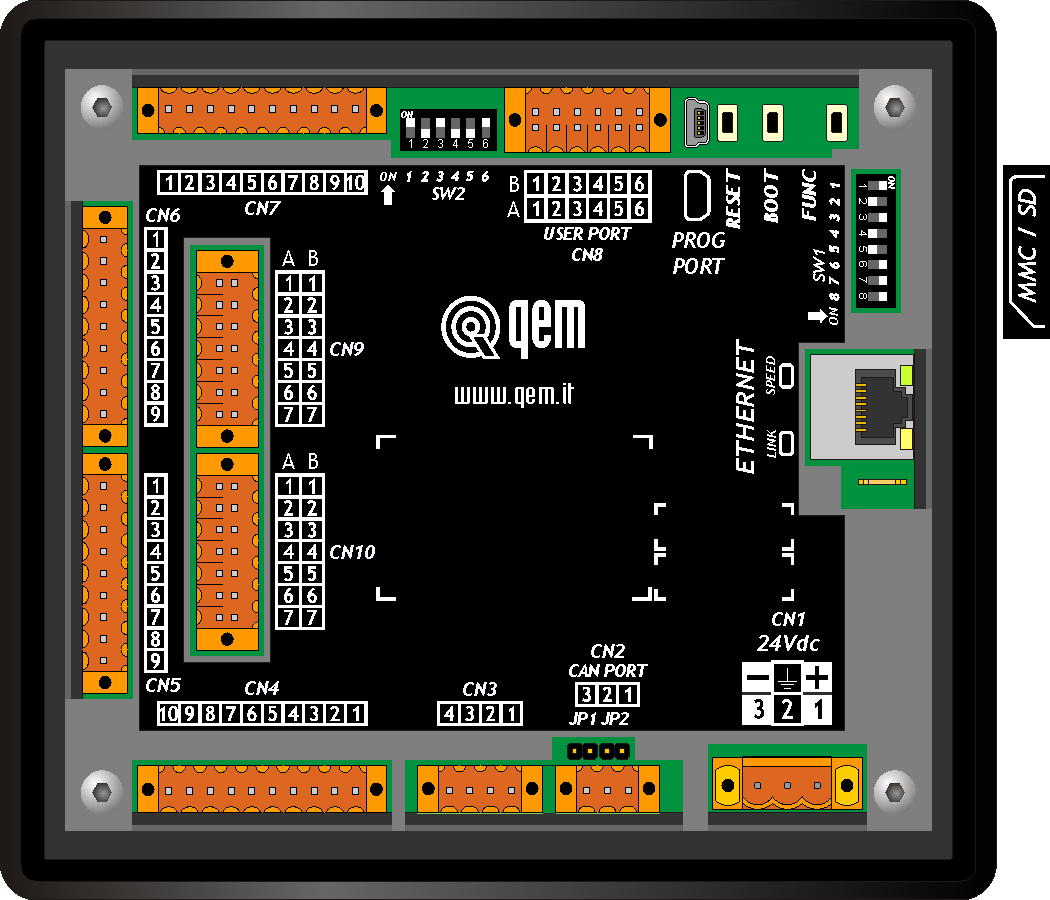
1MB/S6 - - 8 - - 7.1 Led
I led “pow, run, stop, err” sono detti led di sistema, essi sono presenti sia sul pannello anteriore che sulla parte posteriore degli strumenti provvisti di display e soltanto sulla parte superiore degli strumenti senza display.

I led utente “L1, L2, L3 e L4” sono presenti solo sulla parte posteriore:

7.1.1 Segnalazioni “Led di sistema”
Legenda:
 Led ON
Led ON
 Led OFF
Led OFF
 Led Lampeggiante
Led Lampeggiante
Led Colore Stato Descrizione pow Verde 
Strumento acceso Se è l'unico led acceso, segnala lo stato di reset della CPU run Verde CPU in stato di RUN 
CPU in stato di READY stop Giallo Se il led pow è acceso, segnala lo stato di STOP della CPU
Se il led pow è spento, segnala lo stato di BOOT della CPUerr Rosso Se il led pow è spento, segnala un errore hardware. Vedere paragrafo Codici di errore hardware
Se il led pow è acceso, il numero di lampeggi indica il tipo d'errore. Vedere paragrafo Segnalazioni del led errSegnalazioni del led err
N°
lampeggiErrore Descrizione Azioni consigliate 1 Bus error Bus non configurato come descritto nell'applicativo. Verificare la corrispondenza tra la configurazione dell'applicativo QMOVE (sezione BUS della unit di configurazione) e quella del prodotto (schede presenti nel BUS). 2 CheckSum Error Il controllo di integrità sulle variabili ritentive ha dato esito negativo. (Vedi capitolo Reset Error Checksum) E' necessario ripristinare i dati macchina a partire da un salvataggio (file con estensione DAT) oppure cancellare l'errore con l'apposita funzione di sistema e reintrodurre manualmente i valori. 3 Index Out of Bound Indice di un array è puntato su un elemento inesistente Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 4 Program Over Range L'indice di selezione programma all'interno del DATAGROUP ha tentato di accedere ad un programma non esistente. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 5 Step Over Range l'indice di selezione del passo all'interno del DATAGROUP ha tentato di accedere ad un passo non esistente. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. In genere il valore utilizzato come indice ha un valore inferiore a 1 oppure superiore alla dimensione dell'array. 6 Division By Zero Il denominatore di un'operazione di divisione del programma applicativo ha valore zero. Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. 7 Syntax Error Il programma applicativo ha un'istruzione non valida Tale errore potrebbe comparire perché il program counter ha incontrato l'istruzione QCL END. 8 Watch Dog Error Un modulo CAN non funziona correttamente, oppure una scheda di specializzazione ha un problema hardware Con l'ambiente di sviluppo Qview è possibile aprire il pannello “Monitor→Bus” e nella colonna di destra chiamata “Watchdog Bus” è indicata la scheda che ha causato il problema. 9 Stack Error Il programma applicativo ha utilizzato tutti i livelli di chiamata a subroutine permessi Con l'ambiente di sviluppo Qview è possibile aprire l'editor di una unit e con il comando “Edit→Go to PC” viene evidenziata la linea di programma che ha causato l'errore. Analizzare il flusso di esecuzione della unit, gli annidamenti di chiamata delle subroutine hanno un limite, oltre il quale viene generato questo errore. Codici di errore hardware
Se nella fase di accensione, viene rilevato un malfunzionamento di qualche periferica, il sistema si blocca e viene segnalato l'errore mediante il lampeggio del solo led
err mentre tutti gli altri leds di sistema rimangono spenti.
Il numero di lampeggi indica il tipo di errore secondo la seguente tabella:
Numero di lampeggi Errore 1 Display 2 FPGA 3 Media 4 Bootloader 5 FW 6 Bus 7 Segnalazione non attiva 8 Segnalazione non attiva 9 Exception Ognuna di queste segnalazioni indica una situazione di errore grave. Il prodotto deve essere inviato all'assistenza QEM.
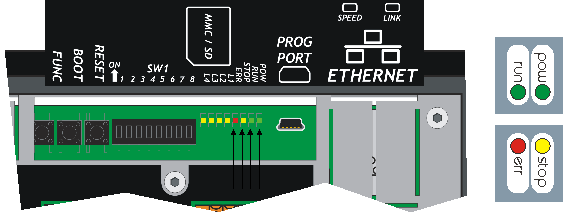
7.1.2 Segnalazioni “Led utente”

Led Colore Descrizione L1Giallo Programmabili nel programma applicativo tramite la variabile di sistema QMOVE:sys003 ed utilizzati dalle Funzioni di sistema L2 L3 L47.2 Pulsanti

Nome Descrizione  FUNC
FUNCPremuto all'accensione dello strumento permette di accedere alle Funzioni di sistema BOOTPremuto all'accensione dello strumento permette di impostare la CPU in stato di Boot e quindi di accedere alle funzioni di aggiornamento firmware RESETReset CPU. Il sistema viene fatto ripartire ripristinando le condizioni iniziali (come dopo una accensione) 8. Generalità di funzionamento
8.1 Introduzione
Nel presente capitolo verranno introdotti alcuni concetti e descritti alcuni funzionamenti del prodotto. Tali contenuti sono in parte legati e implementati nel firmware. Tale software implementa tutte le funzionalità che permettono al prodotto di essere un componente del sistema programmabile QEM chiamato Qmove.
8.2 Organizzazione dei dati e delle memorie
Per meglio comprendere la terminologia utilizzata in questo capitolo, è necessario conoscere l'organizzazione dei dati e delle memorie di un applicativo QMOVE. Un applicativo QMOVE è un programma scritto in linguaggio QCL che, opportunamente tradotto in codice binario, viene trasferito su un hardware QMOVE e ivi memorizzato. In questo hardware il microprocessore, sul quale gira un programma chiamato firmware, si occupa di interpretare le istruzioni del codice binario di cui sopra ed eseguire le appropriate operazioni ad esse associate.
Un applicativo QCL è composto, oltre che dalle istruzioni, anche dalle variabili sulle quali possono agire le istruzioni QCL. Alcune di queste variabili sono ritentive, cioè mantengono inalterato il loro valore tra uno spegnimento ed una accensione, le altre assumono valore zero ad ogni accensione. Lo schema a blocchi seguente illustra l'organizzazione dei dati in un applicativo QCL trasferito sulle memorie di un qualsiasi hardware QMOVE:
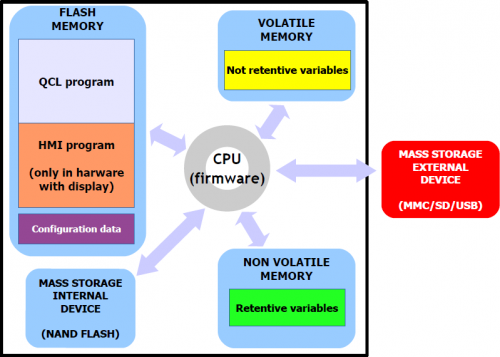
Come si può notare, all'interno di un hardware QMOVE, vi sono più dispositivi di memorizzazione di tecnologia anche diversa (ad esempio la memoria dati non volatile potrebbe essere una ram tamponata piuttosto che una eeprom, piuttosto che una ram magneto-resistiva, …) che sono stati divisi nelle seguenti categorie:
“Memoria non volatile”, dove vengono memorizzati:
-
Programma QCL: è l'insieme delle istruzioni QCL tradotte dal compilatore in codice binario.
-
Programma HMI: è l'insieme delle pagine HMI tradotte dal compilatore in codice binario. E' presente solamente negli hardware QMOVE con display.
-
Dati di configurazione: sono i dati di taratura e configurazione come ad esempio i valori di calibrazione del touch screen, i dati di configurazione della comunicazione ethernet (indirizzo IP, ecc…), ecc. Questi dati possono essere inseriti sia da apposite funzioni di sistema che da specifici software PC di utilità.
“Memoria dati non volatile”, dove vengono memorizzate:
-
Variabili ritentive: è l'insieme delle variabili che mantengono inalterato il loro valore tra uno spegnimento ed una accensione (es. la categoria SYSTEM, ARRAYS, DATAGROUP, ecc…).
“Memoria dati volatile”, dove vengono memorizzate:
-
Variabili non ritentive: è l'insieme delle variabili che assumono il valore 0 ad ogni accensione (es.: GLOBAL, ARRGBL, ecc…).
La memoria dati volatile è utilizzata anche come memoria dinamica, cioè quella memoria necessaria al firmware per le operazioni internen e per la gestione delle pagine HMI attive.
“Memoria di massa interna” gestita attraverso un filesystem standard, è utile per la memorizzazione di informazioni attraverso il device DATASTORE (lettura - scrittura di file binari o csv con ricette, log, parametrizzazioni varie, ecc).
E' inoltre utilizzato per memorizzare il backup dell'applicativo QMOVE.“Memoria di massa esterna” gestita attraverso un filesystem standard, è utile per il caricamento dell'applicativo QMOVE, al caricamento/salvataggio dei dati, all'aggiornamento firmware oppure per la memorizzazione di informazioni attraverso il device DATASTORE.
8.3 Stati CPU
La CPU ha vari stati di funzionamento. Nella seguente figura vengono illustrati i principali cambi di stato a partire dall'accensione strumento.
Gli stati principali di funzionamento sono RESET, READY, RUN e STOP.
Gli eventi della CPU che determinano la transizione da uno stato all'altro sono principalmente legati all'invio di comandi da parte dell'ambiente di sviluppo: Run, Reset, Stop e Restart.
Download applicativo rappresenta la procedura dell'ambiente di sviluppo che permette di trasferire l'applicativo QMOVE alla CPU.
Download applicativo rappresenta la procedura dell'ambiente di sviluppo che permette di trasferire l'applicativo QMOVE alla CPU.
The BOOT state can be used to access the firmware updating functions.
AUTODIAGNOSI
In fase di accensione, dopo aver eseguito la scansione dei leds di sistema, lo strumento esegue una serie di operazioni di autodiagnosi. Quando vengono rilevate anomalie o quando è necessario informare l'operatore di una particolare situazione, la procedura di autodiagnosi viene momentaneamente interrotta, segnalando ciò che è avvenuto.
La segnalazione dell'anomalia avviene attraverso i led L1, L2 e un messaggio sul display (per gli stumenti che ne sono dotati).Messaggi di sistema
n. Led ON Messaggio di sistema (strumenti dotati di display) Descrizione Tipo 1 L1System Data WRITE ERRORIndica che è avvenuto un errore di scrittura durante la memorizzazione dei dati di configurazione. B 2 L2System Data IS RESTORED FROM DEFAULTIndica che i dati di configurazione sono stati ripristinati ai valori di default. C 3 L1
L2System Data is updated
Please verify new dataIndica che i dati di configurazione sono stati convertiti in un nuovo formato. Verificare che le precedenti impostazioni siano mantenute. C 4 L3Firmware is updated
old: 1K31F10 1.001
new: 1K31F10 1.002Indica che è avvenuto un aggiornamento firmware. C Quando la condizione rilevata permette il proseguo della fase di avvio (tipo C), lo strumento, se dotato di display, visualizza il messaggio “Press FUNC or F1 to continue” ed attende la pressione del pulsante FUNC
o del tasto F1 per proseguire la procedura di booting.
per proseguire la procedura di booting.
Se non dotato di display, lo strumento attende un tempo di 5 secondi prima di proseguire con la fase di avvio, senza attendere la pressione di alcun tasto.
Quando invece la situazione non permette il proseguo della fase di avvio (tipo B), lo strumento, se dotato di display, visualizza il messaggio
“PLEASE TURN OFF AND TURN ON THE SYSTEM”e rimane in questo stato fino allo spegnimento. Nel caso di strumento senza display il lederr lampeggia continuamente.
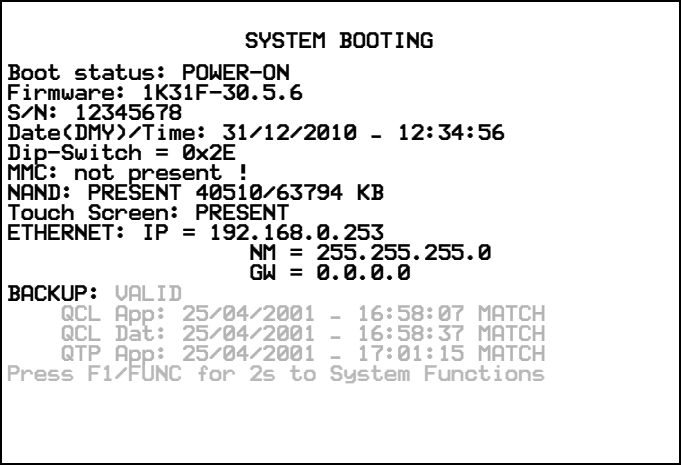
SYSTEM BOOTING
Durante lo Stato AUTODIAGNOSI e SYSTEM BOOTING sugli strumenti dotati di display, vengono visualizzate alcune importanti informazioni riguardanti il sistema come nell'esempio riportato nella seguente figura:
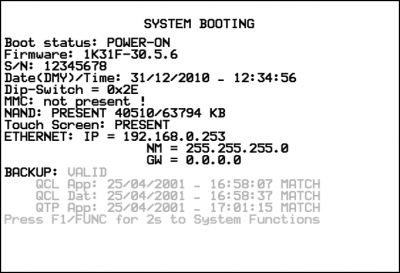

ATTENZIONE: I valori riportati in figura sono un esempio e possono cambiare a seconda dello strumento in questione. Lista delle informazioni visualizzate
Nr. Messaggio Descrizione 1 Boot status: POWER-ONViene visualizzato lo stato di boot:
POWER-ON Accensione dello strumento
INIT Inizializzazione download applicativo
RESTART Riavvio software dello strumento
BACKUP Esecuzione dell'operazione di Backup
RESTORE Esecuzione dell'operazione di Restore2 Firmware: 1K31F-30.5.6Vengono visualizzati nome, versione, major release e minor release del firmware. Nell'esempio abbiamo:
1K31F Nome del firmware
30 Versione
5 Major release
6 Minor release (build)3 S/N: 12345678Viene visualizzato il numero di serie dello strumento. 4 Date(DMY)/Time: 31/12/2010 - 12:34:56Viene visualizzato l'orologio calendario nel formato:
GG/MM/YYYY - HH:MM:SS5 Dip-Switch = 0x2EViene visualizzato un valore esadecimale rappresentante lo stato dello switch SW1.
Equivale al valore della variabile di sistema SYS002.6 MMC: PRESENT 510/31250 KBSe nell'apposito slot viene inserita una MMC/SD, in questa fase vengono visualizzati i dati del dispositivo come KB usati (510) e KB totali (31250).
Nel caso in cui il dispositivo non sia presente viene visualizzato il messaggio “not present !”7 NAND: PRESENT 40510/63794 KBViene verificata la presenza del dispositivo interno NAND e quindi vengono visualizzati i KB usati e i KB totali.
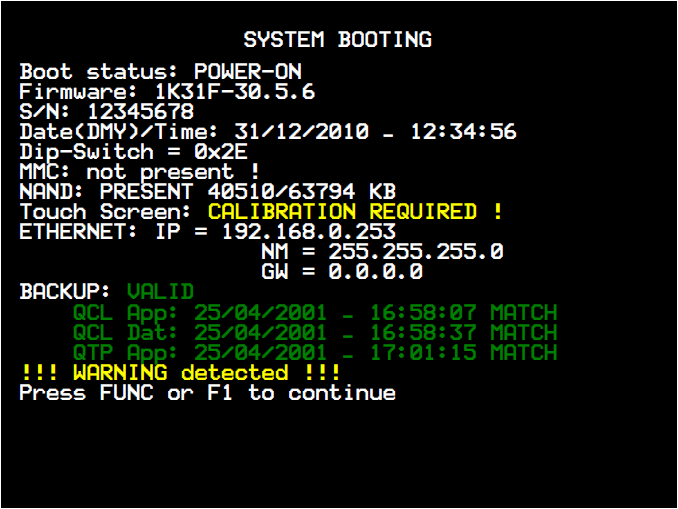
Nel caso in cui il dispositivo non venga rilevato, viene segnalato un errore e viene visualizzato “NAND: NOT PRESENT !”8 Touch Screen: PRESENTNegli strumenti dotati di touch screen, ne viene rilevata la presenza e quindi vengono verificati i dati di calibrazione.
Nel caso in cui debba essere ancora eseguita la calibratura, viene visualizzato il messaggio “CALIBRATION REQUIRED !”.
La calibratura del touch è possibile con la funzione di sistema “Touch Calibration”.9 ETHERNET: IP = 192.168.0.253
NM = 255.255.255.0
GW = 0.0.0.0Negli strumenti dotati di interfaccia ethernet, vengono visualizzati i parametri relativi all'indirizzo ip (IP), maschera di rete (NM) e gateway (GW).
La modifica di questi valori è possibile con la funzione di sistema “Set Ethernet communic. parameter”10 BACKUP: VALID
QCL App: 25/04/2001 - 16:58:07 MATCH
QCL Dat: 25/04/2001 - 16:58:37 MATCH
QTP App: 25/04/2001 - 17:01:15 MATCHViene verificata la presenza in NAND di un backup valido e quindi vengono visualizzati i dati di data e ora di creazione dei files di backup relativi all'applicativo QCL (QCL App), ai dati dell'applicativo QCL (QCL Dat) e all'applicativo QTP (QTP App).
Se dopo la scritta “BACKUP” viene visualizzato “VALID” significa che il backup può essere correttamente ripristinato mediante funzione di sistema di “Restore from NAND”.
Se dopo la scritta “BACKUP” viene visualizzato “NOT PRESENT” significa che il backup non è presente.
Se dopo la scritta “BACKUP” viene visualizzato “NOT VALID” significa che il backup non può essere correttamente ripristinato in quanto i checksum dei tre files di cui è composto non sono tra di loro congruenti. Dopo ogni file (QCL App, QCL Dat e QTP App), oltre alle informazioni di data e ora di creazione, viene anche visualizzata un'ulteriore informazione:
“MATCH” indica che il file è coerente con quello dell'applicazione in RUN.
“NO MATCH” indica che il file non è coerente con quello dell'applicazione in RUN.
“SIZE ERROR” indica che la dimensione del file non è valida, forse perché la procedura di scrittura non si è conclusa correttamente.
“NOT PRESENT” indica che il file non è presente.11 Press F1/FUNC for 2s to System FunctionsLa visualizzazione di questo messaggio indica che la pressione per almeno 2 secondi del tasto F1 o del pulsante FUNC permette di accedere alle funzioni di sistema come descritto nella Procedura. Il messaggio rimane visibile per 4 secondi. 12 !!! WARNING detected !!!
Press FUNC or F1 to continueSe durante le precedenti fasi, vengono visualizzati dei messaggi di warning, che non pregiudicano il funzionamento del sistema, per permettere all'operatore di leggere con facilità lo schermo viene atteso un tempo di circa 20 secondi.
Per non attendere e proseguire prima, premere il tasto F1 o il pulsante FUNC.13 !!! ERROR detected !!!
Press FUNC or F1 to continueMessaggio visualizzato se nelle precedenti fasi, vengono visualizzati dei messaggi di errore.
Per proseguire viene richiesto di premere il tasto F1 o il pulsante FUNC.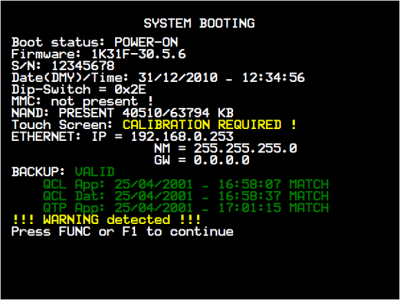
ATTENZIONE: I valori riportati in figura sono un esempio e possono cambiare a seconda dello strumento in questione.
Per gli strumenti senza display, durante questa fase non vengono riportate informazioni.Lo stato FUNZIONI DI SISTEMA permette di accedere alle omonime FUNZIONI DI SISTEMA, che sono particolari procedure, che permettono all'utente di eseguire varie operazioni. Per la descrizione vedere il capitolo Funzioni di sistema.
Stato led pow
 run
runCausa stato Mancanza dell'applicativo in memoria. Condizioni che possono portare la CPU in questo stato Comando di RESET. Da questa condizione si può passare solamente ad uno stato di READY eseguendo un download dell'applicativo utilizzando l'ambiente di sviluppo Qview6.
Stato led pow
runCausa stato Applicativo valido ed è nell'attesa di esecuzione. Condizioni che possono portare la CPU in questo stato Download applicativo. Da questa condizione si può passare agli stati di RUN o RESET.
Stato led pow
runCausa stato Esecuzione applicativo. Condizioni che possono portare la CPU in questo stato Comando RUN. Da questa condizione si può passare a tutti gli altri stati della CPU.
Stato led pow
stop » runCausa stato Arresto l'esecuzione dell'applicativo. Condizioni che possono portare la CPU in questo stato Nell'interpretazione del codice applicativo si è incontrato un breakpoint. Da questa condizione si può passare a tutti gli altri stati della CPU.
8.4 Funzioni di sistema
ATTENZIONE: L'utilizzo di tali procedure è potenzialmente pericoloso (vedi ad esempio la cancellazione dell'applicazione) ed è perciò preferibile che sia effettuato da personale esperto o sotto la supervisione dello stesso.
Le funzioni di sistema sono particolari procedure che permettono all'utente di eseguire varie operazioni come ad esempio la configurazione/taratura delle periferiche, il salvataggio/ripristino dei dati e dell'applicazione su/da dispositivi rimovibili, la cancellazione dell'applicazione e la gestione delle memorie di massa.
Sugli strumenti dotati di display alcune funzioni di sistema sono accessibili solo con l'introduzione di una password, altrimenti viene negato l'accesso e visualizzato il messaggio “Function is locked”.Di seguito sono elencate tutte le funzioni di sistema.
Se nella colonna “PWD” compare 'Y' significa che la funzione richiede l'introduzione della password di sistema (default: “123”).Funzioni di sistema
n. Led ON Funzione di sistema PWD Descrizione 1 L101 - Reset Error Checksum - Reset errore checksum.
N.B.: se è presente l'errore checksum, il ledL1 lampeggia.2 L202 - Copy all files MMC/SD → NAND - Copia tutti i files da MMC/SD a NAND Flash. 3 L1
L203 - Copy all files NAND → MMC/SD - Copia tutti i files da NAND Flash a MMC/SD. 4 L304 - Application delete Y Cancella l'applicazione. 5 L1
L305 - Application upload from MMC/SD Y Carica l'applicazione da MMC/SD. 6 L2
L306 - Set Date & Time - Regolazione dell'orologio di sistema 7 L1
L2
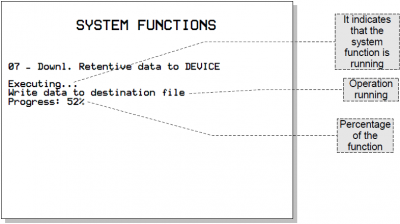
L307 - Downl. retentive data to MMC/SD - Salva i dati ritentivi su MMC/SD. 8 L408 - Set NEW Password Y Impostazione della nuova password di accesso alle funzini di sistema “locked” 9 L1
L409 - Remove all files from NAND Flash Y Elimina tutti i files presenti sulla NAND Flash. 10 L2
L410 - Show NAND Flash files - Visualizzazione dei files presenti sulla NAND Flash 11 L1
L2
L411 - Touch Calibration - Esegue la procedura di calibrazione del Touch Screen se presente. 12 L3
L412 - Set Ethernet communic. parameter - Esegue la procedura di impostazione dei parametri di comunicazione ethernet (indirizzo IP,…, ecc.) 13 L1
L3
L413 - Backup to NAND - Esegue il backup dell'applicativo QCL, dei dati e dell'applicativo QTP in NAND. 14 L2
L3
L414 - Restore from NAND Y Esegue il restore dell'applicativo QCL, dei dati e dell'applicativo QTP dalla NAND. Nota: Per uscire dalle funzioni di sistema mantenere premuto il tasto F1 o il pulsante FUNC per almeno due secondi.
Per accedere alle Funzioni di sistema, accendere lo strumento con il pulsanteFUNC/tasto F1 premuto. 
FUNCL'applicativo QMOVE, se presente, non viene eseguito ed il led
L1 si accende.
Sugli strumenti che sono dotati di display viene visualizzata la pagina “SYSTEM FUNCTIONS”.
Utilizzando il pulsante FUNC/tasto F1 è possibile scorrere le funzioni disponibili.
La funzione selezionata viene indicata dalla combinazione dei led accesi di L1-L2-L3-L4 e sugli strumenti che sono dotati di display, viene visualizzata la funzione selezionata nella pagina “SYSTEM FUNCTIONS”.
FUNC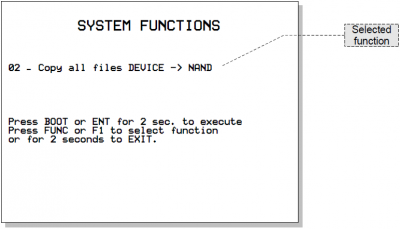
La tabella “Funzioni di sistema” riporta le liste delle funzioni di sistema e le relative combinazioni di leds.
Premendo il pulsante BOOT/tasto ENTER per 2 secondi la funzione selezionata viene eseguita. 
BOOTIl led POW inizia a lampeggiare ad indicare che la funzione selezionata è in esecuzione. POWSugli strumenti che sono dotati di display, viene visualizzata la pagina “SYSTEM FUNCTIONS” come nella figura riportata di seguito.
Quando l'esecuzione della funzione termina il led POW smette di lampeggiare. POWSugli strumenti che sono dotati di display, viene visualizzata la pagina “SYSTEM FUNCTIONS” come nella figura riportata di seguito.
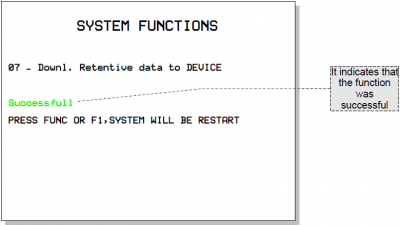
Premendo il pulsante FUNC/tasto F1 lo strumento si riavvia.
FUNCSe l'esecuzione della funzione non va a buon fine si spegne il led POW e inizia a lampeggiare il led ERR.. POW
ERR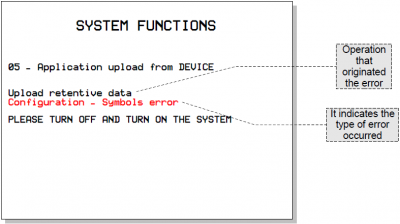
Il numero di lampeggi indica il tipo di errore avvenuto come riportato nella tabella Messaggi di errore delle Funzioni di sistema.
Quando una funzione di sistema termina con errore, il numero di lampeggi del led
err indica il tipo di errore avvenuto.
Se è presente il display, viene visualizzato anche un messaggio che descrive la causa dell'errore.Messaggi di errore delle Funzioni di sistema
Errore/Numero lampeggi led ERR Messaggio 1 Generic error2 Open/Exist/Create file error3 Read file error4 Write file error5 Out of Memory error6 QMos Version error7 Checksum Error8 Symbols checksum No Match9 Configuration / Symbols error10 File format error11 Format error12 Device not present or unformatted13 Application not present error14 Touch calibration failure15 File compression type not support16 Target don't match project !17 Fw version don't match project !18 File copy error19 File size error20 Crypt operation error21 Invalid Product Serial Number22 Function is locked23 Function not enabled8.4.1 Descrizione
Le variabili ritentive sono sottoposte dal sistema ad un controllo di integrità mediante applicazione di un CRC alla memoria dati non volatile. Ciò permette di rilevarne l'eventuale corruzione ed impedire l'avvio dell'applicazione segnalando la situazione con il lampeggio del led
err come riportatosu Segnalazioni del led err.
Per poter far funzionare nuovamente l'applicazione è necessario eseguire un nuovo download dell'applicazione con l'ambiente di sviluppo, oppure eseguire la funzione di sistema “Reset Error Checksum”. Queste operazioni cancellano lo stato di errore ed azzera tutte le variabili ritentive.La procedura esegue le seguenti fasi:
-
Verifica dello stato di errore e termine della funzione se non è presente nessun errore.
Nei prodotti microQMove viene anche verificata la presenza applicativo QCL. -
Vengono azzerati i dati ritentivi e viene visualizzato il messaggio
“Clear power down data…”fino al termine della procedura. -
Termine operazione
Questa procedura permette di copiare tutti i files presenti nella root e nella directory “DS” della memoria di massa esterna removibile MMC/SD o USB nella memoria di massa interna NAND.
La seguente tabella riporta la sequenza delle operazioni eseguite e gli eventuali possibili errori:
Messaggio Descrizione Possibili errori Check DEVICE presenceControllo presenza dispositivo memoria di massa esterno
Su DEVICE compare MMC o USB, a seconda di cosa è stato selezionatoDevice not present or unformattedMounting device…Caricamento del dispositivo di memoria di massa esterna Device not present or unformattedSearching files…Ricerca file in corso No Files FoundCopy <filename>….Esegue la copia dei files indicando il nome di quello attualmente in copia Questa procedura permette di copiare tutti i files presenti nella root e nella directory “DS” della memoria di massa interna NAND nella memoria di massa esterna removibile MMC/SD o USB.
La seguente tabella riporta la sequenza delle operazioni eseguite e gli eventuali possibili errori:
Messaggio Descrizione Possibili errori Check DEVICE presenceControllo presenza dispositivo memoria di massa esterno
Su DEVICE compare MMC o USB, a seconda di cosa è stato selezionatoDevice not present or unformattedMounting device…Caricamento del dispositivo di memoria di massa esterna Device not present or unformattedSearching files…Ricerca file in corso No Files FoundCopy <filename>….Esegue la copia dei files indicando il nome di quello attualmente in copia Esegue la cancellazione dell'applicazione azzerando la memoria dati non volatile, cancellando il programma QCL e, ove presente, cancellando il programma HMI.
La seguente tabella riporta la sequenza delle operazioni eseguite e gli eventuali possibili errori:
Messaggio Descrizione Possibili errori Reset retentive dataAzzera la memoria dati non volatile Write file errorDelete QCL applicationCancella il programma QCL Write file errorDelete HMI applicationCancella il programma HMI (se presente il display) Write file errorEsegue il caricamento di un'applicazione dal dispositivo di memoria di massa esterno MMC/SD o USB, alla memoria non volatile .
E' possibile caricare il programma QCL, il programma HMI ed i dati non volatili, uno solo di questi, due o tutti e tre.
Nel dispositivo di memoria di massa esterno MMC/SD o USB deve essere presente almeno uno dei seguenti files:
-
applic.bin per il compilato del programma QCL generato dall'ambiente di sviluppo QView;
-
applic.dat per il file dati generato dalla procedura “Save Data…” dell'ambiente di sviluppo Qview o dalla funzione di sistema Downl. retentive data to DEVICE;
-
appqtp.bin per il compilato del programma HMI generato dall'ambiente di sviluppo QPaint; esso viene generato tramite l'apposita funzione “Scarica il progetto su File…”.
Messaggio Descrizione Possibili errori Check DEVICE presenceControllo presenza dispositivo memoria di massa esterno
Su DEVICE compare MMC o USB, a seconda di cosa è stato selezionatoDevice not present or unformattedMounting device…Caricamento del dispositivo di memoria di massa esterna Device not present or unformattedSe presente il file applic.bin:
Messaggio Descrizione Possibili errori Upload QCL applicationCaricamento programma QCL Open/Exist/Create file error
Write file error
Read file error
Out of Memory Error
QMos Version Error
Checksum Error
Symbols checksum No Match
Configuration / Symbols ErrorSe non presente il file applic.bin, un applicativo deve essere presente nella memoria non volatile altrimenti viene visualizzato il messaggio: “Application not present”.
Se presente il file applic.dat:
Messaggio Descrizione Possibili errori Upload retentive dataCaricamento dati ritentivi nella memoria dati non volatile Open/Exist/Create file error
Write file error
Read file error
Out of Memory Error
QMos Version Error
Checksum Error
Symbols checksum No Match
Configuration / Symbols Error
QTP File format errorLa procedura esegue le seguenti fasi:
-
Verifica della presenza del dispositivo MMC/SD o USB.
Viene visualizzato il messaggio“Check DEVICE presence”.
Su DEVICE compare MMC o USB, a seconda di cosa è stato selezionato. -
Caricamento del dispositivo MMC/SD o USB.
Viene visualizzato il messaggio “Mounting device…”. -
Caricamento del programma QCL (applic.bin) se presente nel dispositivo removibile
Viene visualizzato il messaggio“Upload QCL application”. -
Caricamento dei dati ritentivi del programma QCL (applic.dat) se presente nel dispositivo removibile
Viene visualizzato il messaggio“Upload retentive data”.
Nota: se il file applic.dat non viene rilevato, vengono mantenuti i dati presenti nel sistema purché i checksums Symbol e Configuration non siano variati. In caso contrario, i dati verranno tutti posti a zero. -
Caricamento del programma HMI (appqtp.bin) se presente nel dispositivo removibile
Viene visualizzato il messaggio“Upload HMI application”. -
Chiusura del file e termine operazione.
Questa procedura permette di impostare l'orologio/calendario di sistema.
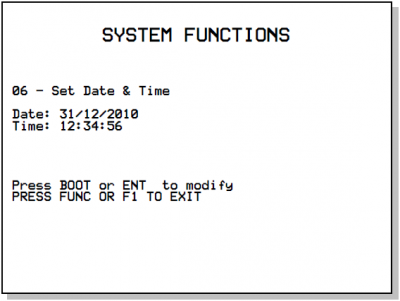
Premendo il tasto ENTER o il pulsante BOOT si potrà introdurre un nuovo valore nei campi visualizzati. Ad ogni conferma del dato in introduzione, verrà posto in modifica il successivo campo. Al termine dell'ultimo campo, i dati introdotti verranno salvati.
Questa funzione permette di creare un file sulla memoria di massa esterna (MMD/SD o USB) contenente i valori dei dati ritentivi.
Il file risultante, il cui nome è “applic.dat” è uguale a quello ottenuto dalla procedura “Save Data…” dell'ambiente di sviluppo QView. La funzione si può eseguire solamente se è presente un'applicazione QCL valida sullo strumento.La procedura esegue le seguenti fasi:
-
Verifica della presenza del dispositivo MMC/SD o USB.
Viene visualizzato il messaggio“Check DEVICE presence”.
Su DEVICE compare MMC o USB, a seconda di cosa è stato selezionato. -
Caricamento del dispositivo MMC/SD o USB.
Viene visualizzato il messaggio“Mounting device…”. -
Verifica della presenza del programma QCL
Viene visualizzato il messaggio“Checking application presence…”. -
Verifica di validità dei dati ritentivi
Viene visualizzato il messaggio“Checking retentive data…”. -
Apertura del file di destinazione “applic.dat” sul dispositivo removibile MMC/SD o USB
Viene visualizzato il messaggio“Open destination file…”. -
Scrittura dell'intestazione
Viene visualizzato il messaggio“Write headers to destination file”. -
Scrittura dei dati ritentivi
Viene visualizzato il messaggio“Write data to destination file”.
Nota: durante questa fase viene visualizzato il valore percentuale dell'operazione -
Chiusura del file e termine operazione
Permette di modificare la password di accesso alle funzioni di sistema. La password è un valore numerico di massimo 3 cifre. La password di default è: 123 La procedura richiede prima l'introduzione della password attuale (Actual Pwd) e quindi, se corretta, permette l'introduzione della nuova password (New Pwd).
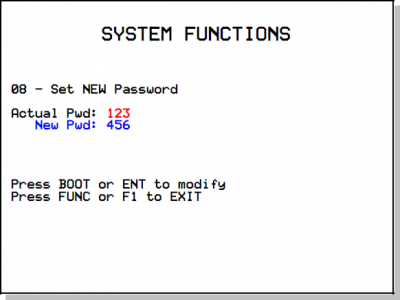
Al termine dell'introduzione della nuova password, viene visualizzato il messaggio
“saving data…”che indica la memorizzazione del nuovo dato.Nota: l'inserimento di una password uguale a 0 (zero) comporta la disabilitazione della richiesta di password.
Cancella tutti i files presenti nella memoria di massa interna (NAND flash).
A differenza della funzione “Format NAND Flash” agisce a livello di filesystem e quindi può essere eseguita tutte le volte che è necessario.La procedura esegue le seguenti fasi:
-
Calcolo del numero di files presenti nella memoria di massa interna.
-
Viene visualizzato il messaggio
“Searching files…”. -
Se il numero di files trovati è zero, viene visualizzato il messaggio
“No Files Found”e la funzione termina, altrimenti viene visualizzato il messaggio“Delete <filename>”indicante la cancellazione di ogni file trovato. -
Chiusura del dispositivo interno e termine operazione
Visualizza il nome e la dimensione di tutti i files presenti nella memoria di massa interna (NAND flash).
La procedura esegue le seguenti fasi:
-
Calcolo del numero di files presenti nella memoria di massa interna.
-
Viene visualizzato il messaggio
“Searching files…”. -
Se il numero di files trovati è zero, viene visualizzato il messaggio
“No Files Found”e la funzione termina. -
Per ogni file trovato viene visualizzato il nome del file stesso e la dimensione in bytes
“<filename> - <size>B”di ogni singolo file trovato. -
Viene quindi attesa la pressione del tasto di BOOT o del pulsante ENTER per proseguire alla visualizzazione del prossimo file come visualizzato dal messaggio
“Press BOOT or ENT to show next filename” -
Chiusura del dispositivo interno e termine operazione
Questa procedura serve a tarare il dispositivo touch-screen, se presente.
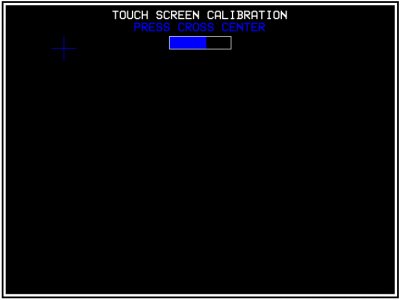
All'ingresso della procedura, viene presentata una schermata in cui è presente una croce di colore blu.
Premere il centro della croce fino a quando la barra di progressione ha raggiunto il completamento.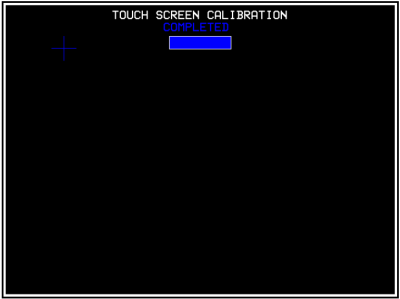
A questo punto, compare la scritta “COMPLETED”ed è possibile rilasciare la pressione.
Nota: se la pressione viene rilasciata prima del completamento della barra di progressione, la procedura viene abortita e compare la scritta“!! OPERATION ABORTED !!”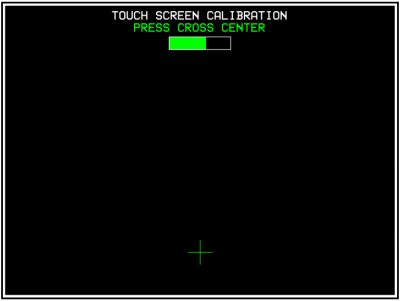
Subito dopo compare una nuova croce di colore verde. Anche in questo caso ripetere l'operazione fino a quando la barra di progressione è completa e viene visualizzata la scritta “COMPLETED”.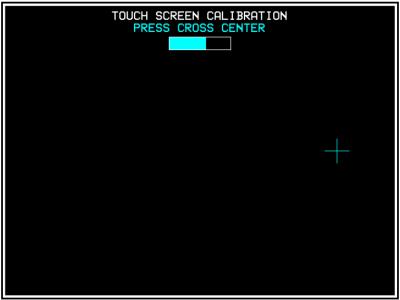
Viene quindi proposta un'ultima schermata con una nuova croce di colore ciano. Anche in questo caso ripetere l'operazione fino a quando la barra di progressione è completa e viene visualizzata la scritta “COMPLETED”.Permette di visualizzare e modificare i parametri di comunicazione della porta ETHERNET.
All'accesso alla funzione compaiono tutti i dati memorizzati nello strumento.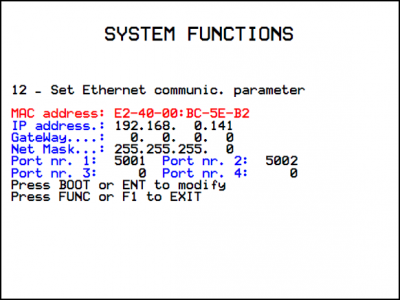
Per modificare un parametro, premere il tasto ENTER ed introdurre il nuovo valore.
Alla pressione del tasto ENTER viene posto in modifica il campo successivo.
Alla conferma dell'ultimo campo i dati vengono salvati e durante l'operazione viene visualizzato il messaggio“saving data…”La procedura di backup permette di creare, sotto forma di files memorizzati nel dispositivo NAND, una copia degli applicativi QCL e QTP in esecuzione e un'immagine dei dati ritentivi. I files creati hanno il nome di:
-
applic.qcy identifica il file contenente l'applicazione QCL (CPU)
-
appdat.qcy identifica il file contenente i dati ritentivi dell'applicazione QCL
-
appqtp.qcy identifica il file contenente l'applicazione QTP (HMI)
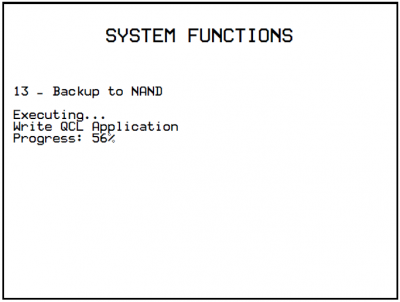
La procedura esegue le seguenti fasi:
-
Verifica della presenza applicazione QCL
Viene visualizzato il messaggio“Checking application presence…”. -
Creazione e scrittura in NAND del file di backup applicazione QCL: applic.qcy
Viene visualizzato il messaggio“Write QCL application”e il valore percentuale dell'operazione. -
Verifica della presenza e validità dei dati ritentivi dell'applicatizione QCL
Viene visualizzato il messaggio“Checking retentive data…”. -
Creazione e scrittura in NAND del file di backup dati ritentivi dell'applicazione QCL: appdat.qcy
Viene visualizzato il messaggio“Write QCL data”e il valore percentuale dell'operazione. -
Se lo strumento dispone di display, viene controllata la presenza dell' applicazione QTP:
Se l'applicazione QTP è corretta, viene creato in NAND il file di backup applicazione QTP appqtp.qcy, viene visualizzato il messaggio“Write QTP application”e il valore percentuale dell'operazione;
Se l'applicazione contiene errori, viene visualizzato il messaggio“QTP application error”;
Se l'applicazione QTP non è rilevata, viene visualizzato il messaggio“QTP application not present”. -
Termine della procedura e riavvio del sistema.
La procedura di restore permette di ripristinare, a partire dai files di backup memorizzati nel dispositivo NAND, gli applicativi QCL e QTP e un'immagine dei dati ritentivi.
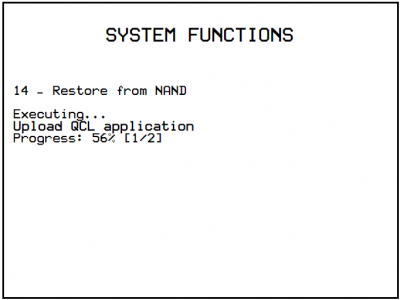
La procedura esegue le seguenti fasi:
-
Viene visualizzato il messaggio “Restore NAND backup”.
-
Lettura da NAND del file di backup applicazione QCL: applic.qcy
Viene visualizzato il messaggio “Upload QCL application”, il valore percentuale dell'operazione ed il numero di fase in esecuzione. -
Lettura da NAND del file di backup dati ritentivi dell'applicazione QCL: appdat.qcy
Viene visualizzato il messaggio “Upload retentive data” e il valore percentuale dell'operazione. -
Se lo strumento dispone di display, viene controllata la presenza dell' applicazione QTP e se presente viene letto dal dispositivo NAND il file di backup applicazione QTP: appqtp.qcy.
Viene visualizzato il messaggio “Upload HMI application”, il valore percentuale dell'operazione ed il numero di fase in esecuzione. -
Termine della procedura e riavvio del sistema.
L'utilizzo delle funzioni di sistema Backup to NAND e Restore from NAND permette di salvare (backup) e ripristinare (restore) un applicativo QMOVE.
Per le operazioni di backup e restore viene utilizzato il dispositivo di memoria interno NAND. La procedura di backup crea, sotto forma di file, una copia del programma QCL, del programma HMI (se lo strumento è provvisto di display) e un'immagine dei dati ritentivi.
I files creati sono:
-
applic.qcy contiene il programma QCL (QCL App)
-
appdat.qcy contiene l'immagine dei dati ritentivi (QCL Dat)
-
appqtp.qcy contiene il programma HMI (QTP App)
I files sono cifrati e solo lo strumento che li ha generati può eseguire la procedura di Restore in modo da salvaguardare una copia non autorizzata dei dati. La copia dei files di backup in un dispositivo esterno tipo MMC/SD o USB è possibile con l'utilizzo della funzione di sistema Copy all files NAND -> DEVICE. Sarà creata nel dispositivo MMC/SD o USB una cartella (directory) con il nome “QBK” che conterrà i files sopracitati. Allo stesso modo è possibile trasferire nello strumento i files di backup utilizzando la funzione di sistema Copy all files DEVICE -> NAND. In questo caso, nel dispositivo MMC/SD o USB, i files devono essere contenuti sempre nella cartella (directory) “QBK”.
Il backup/restore è una funzione importante, che può essere utilizzata nei seguenti casi:
-
per ripristinare l'applicativo QMOVE ad una situazione certa (la situazione presente al momento del backup), se i dati sono stati manipolati da un operatore o se i dati macchina si sono alterati per un qualsiasi motivo.
-
in fase di test di un nuovo applicativo, si può eseguire il backup della versione stabile. Nel caso in cui l'applicativo sotto test non soddisfi, con il comando restore è possibile ripristinare la versione stabile.
Informazioni per la programmazione
In questo capitolo sono raccolte tutte le informazioni relative al prodotto necessarie durante la programmazione, ovvero durante lo sviluppo di un applicativo QCL.
8.4.2 Ambienti di sviluppo
Per la programmazione del prodotto è necessario utilizzare gli ambienti Qview-5 per la programmazione del codice QCL e se il prodotto è equipaggiato di display grafico, anche l'ambiente Qpaint-5 per la progettazione delle pagine grafiche. Ambedue questi software sono contenuti in un pacchetto software che si chiama Qworkbench e che è liberamente scaricabile dal sito Qem (nella sezione download).
Lo strumento è equipaggiato fisicamente da 3 slot come indicato nel capitolo Morsettiere posteriori. Gli slots da 4 a 12 sono comunque dichiarabili e devono venire utilizzati per indirizzare risorse che risiedono nei moduli Canopen.
Un esempio di dichiarazione del BUS da utilizzare nella sezione BUS della unit di configurazione è:
BUS 1 1P20F 10 2 1MD1F . 3 . .
Ovviamente la versione firmware deve coincidere ed il nome della scheda di specializzazione allo slot 3 deve essere corretto. Tale nome è ricavabile dalla colonna più a destra della tabella Versioni hardware.
Per programmare con l'ambiente di sviluppo QPaint-5 è importante selezionare correttamente il target. Per fare questo all'interno dell'ambiente selezionare Progetto ? Configurazione del Target quindi selezionare in accordo con il codice di ordinazione il giusto strumento.
In questo paragrafo vedremo come è possibile rilevare una stima dell'utilizzo delle memorie nel prodotto. La memoria non volatile, disponibile per memorizzare il programma QCL, ha una capacità di 512KB.
La quantità di memoria occupata è pari alla dimensione del file .BIN generato dal Qview. La percentuale di memoria occupata è visualizzabile nel pannello CPU del Qview, alla voce “Used CODE memory”, oppure è possibile ottenere questa informazione dal valore del parametro “sizeapp” del device QMOS.La memoria non volatile, disponibile per memorizzare il programma HMI ha una capacità 5.5MB.
La quantità di memoria occupata è pari alla dimensione del file .BIN generato da Qpaint, il cui valore (in bytes) è visualizzato nel parametro “memqtp” del device MMIQ2.La memoria dati non volatile, disponibile per memorizzare le variabili ritentive, ha una capacità di 819KB.
La percentuale di memoria occupata è visualizzabile nel pannello CPU del Qview, alla voce “Used RETENTIVE”, oppure è possibile ottenere questa informazione dal valore del parametro “sizeret” del device QMOS.La memoria dati volatile per memorizzare le variabili non ritentive ha una capacità dipendente da vari fattori (per esempio la dimensione dei programmi HMI e QCL, della pagina HMI in visualizzazione ecc.)
La memoria generale del sistema libera, disponibile come memoria dati volatile, è indicata dal parametro “memfree” nel device MMIQ2.Le seriali PROG PORT e USER PORT implementano il protocollo di comunicazione proprietario QEM chiamato BIN1.
I device SERCOM e MODBUS sono utilizzabili con tutte le seriali di comunicazione compresa la PROG PORT. Il valore numerico da utilizzare durante la dichiarazione del device per selezionare il canale di comunicazione è il seguente:
0 PROG PORT 1 USER PORT 2 AUX1 PORT 3 AUX2 PORT
Quando i devices SERCOM e MODBUS utilizzano la PROG PORT o la USER PORT essi interessano il canale solo se lo stato di comunicazione del device è aperto (st_opencom = 1). Quando il canale del device viene chiuso (st_opencom = 0) nella seriale ritorna attivo il protocollo BIN1. Se si volesse forzare il protocollo BIN1 sulla porta PROG (ed impedire quindi che il device SERCOM occupi il canale) è necessario attivare il dip 6 di SW1.
Quando si utilizza il protocollo MODBUS RTU con la configurazione elettrica RS485, bisogna fare attenzione al fatto che quando la seriale è in trasmissione lo strumento mantiene attivo il canale (DE) per un tempo superiore a quello stabilito dalla specifica “MODBUS RTU”. Per questo bisogna considerare un tempo minimo di 5 millisecondi dopo i quali sarà possibile ricevere un nuovo messaggio. Anche il device SERCOM quando termina una trasmissione è soggetto al medesimo tempo in cui viene mantenuto il canale attivo (DE).
La porta di comunicazione Ethernet utilizza il protocollo di trasporto TCP/IP dove i pacchetti del protocollo BIN1 vengono fatti viaggiare all'interno dei pacchetti dati TCP/IP. Sono attive due connessioni identificate da due porte di comunicazione liberamente impostabili nei parametri di comunicazione della porta Ethernet.
Vediamo in dettaglio:
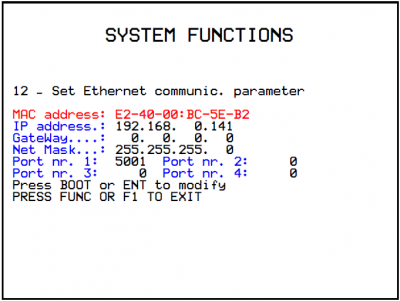 La porta impostata in “Port nr.1:” rappresenta un canale di comunicazione equivalente alla PROG PORT.
La porta impostata in “Port nr.2:” rappresenta un canale equivalente alla USER PORT.
Le porte 3 e 4 non sono attualmente utilizzate.
La porta impostata in “Port nr.1:” rappresenta un canale di comunicazione equivalente alla PROG PORT.
La porta impostata in “Port nr.2:” rappresenta un canale equivalente alla USER PORT.
Le porte 3 e 4 non sono attualmente utilizzate.
Vediamo in dettaglio la lista delle limitazioni al linguaggio QCL:
Descrizione Note FSTEP,FPROG Non è possibile utilizzare queste istruzioni. Di conseguenza viene a mancare la compatibilità diretta con applicativi scritti per CPU livello A. La conversione dell'applicativo risulta comunque semplice. Vediamo in dettaglio altre limitazioni:
Descrizione Note Watchpoint Non disponibili Durante il download dell'applicativo Qmove l'ambiente di sviluppo QView-6 può visualizzare alcuni errori non descritti nel manuale dell'ambiente di sviluppo. Tali errori sono particolari e la stringa descrittiva visualizzata dal QView-6 viene generata direttamente dal firmware.
Nella seguente tabella sono descritti i possibili messaggi di errore generati dal firmware.
Messaggi d'errore firmware
Possibili messaggi d'errore Descrizione Error: SYSTEM + ARRSYS + DATAGROUP + INTDEVICE size overflow by 234bytes.Compare quando le variabili ritentive superano il valore massimo consentito. Error: serial port not avaliable in SERCOM or MODBUS device declaration.Compare quando Il valore numerico utilizzato durante la dichiarazione del device per selezionare il canale di comunicazione è errato. Error: CANOPEN device required if you use more than 3 slots.Nella definizione del BUS si stanno utilizzando più di 3 slots e quindi l'applicazione richiede l'utilizzo di moduli Canopen. Per questa gestione è necessario dichiarare un device CANOPEN. Error: incorrect bus fault mode in CANOPEN declaration.Nella dichiarazione del device CANOPEN si è indicata una modalità di fault (ultimo valore nella dichiarazione) non supportata. Error: incorrect canbus speed in CANOPEN declaration.Nella dichiarazione del device CANOPEN si è indicata una velocità non valida. Error: too much CANOPEN device declaration.Può essere dichiarato un solo device CANOPEN. Error: absol. encoder resource num in ABSCNT device declar. is not avail.Nella dichiarazione del device ABSCNT si è indicata una risorsa che non esiste. Error: COUNT in ABSCNT device declaration is not a simulated counter.L'indirizzo del contatore utilizzato nella dichiarazione del device ABSCNT non è di tipo simulato (es: 1.CNT01). QMos version error. Unsupported instructions set.Una o più istruzioni nel progetto QCL non sono supportate dal firmware. Error: compression file type not support.La compressione del programma QCL compilato non è supportata dal firmware. Error: too mutch slots in bus declarations.Sono stati dichiarati nella sezione BUS più slot di quelli permessi dal tipo di hardware. L'ambiente di sviluppo mette a disposizione una serie di variabili predefinite che possono essere utilizzate precedendo al nome la parola chiave “QMOVE.”. Per esempio “QMOVE.is_suspend”, “QMOVE.sys001”, ecc. Lo scopo del presente paragrafo è illustrare le 16 variabili di sistema chiamate sys001÷sys016 il cui significato dipende dal firmware che si sta utilizzando.
sys001
Questa variabile a sola lettura indica lo stato dei pulsanti FUNC (bit 0) e BOOT (bit 1). I valori possibili sono dunque:
0 = nessun pulsante premuto.
1 = pulsante FUNC premuto.
2 = pulsante BOOT premuto.
3 = pulsanti FUNC e BOOT premuti.sys002
Questa variabile permette la lettura dell'immagine del dip-switch SW1. L'immagine viene acquisita solo all'accensione del prodotto. Il bit 0 corrisponde al dip 1 e così via.
NB: Alcuni dip non sono collegati al microprocessore e quindi viene letto sempre al livello logico 0.
sys003
Questa variabile permette il comando del led L1-L2-L3-L4. Il bit 0 corrisponde a L1, il bit1 a L2 e così via.
sys004
Questa variabile permette l'impostazione del filtro anti-glitch ai segnali delle fasi nei contatori bidirezionali. Il valore è espresso in KHz e si riferisce alla frequenza del segnale di una fase. Il range di valori ammesso è 30÷220. Il valore impostato di default é 220KHz. La variabile può essere anche riletta. La modifica del filtro può essere fatta in qualsiasi momento.
sys005÷16
Non utilizzata.
Con il termine device si identifica una categoria di dispositivi software atti a svolgere attività di supporto e di controllo, più o meno complesse, per risolvere le problematiche legate all'automazione dei sistemi. I devices si distinguono in due tipologie: interni ed esterni. I primi sono quelli il cui codice risiede e viene eseguito dal firmware del prodotto stesso. I secondi sono quelli il cui codice risiede e viene eseguito da schede di specializzazione “intelligenti” munite cioè di propria potenza di calcolo. Il prodotto ivi descritto può gestire solamente devices di tipo interno. La lista dei devices implementati nel firmware dipende dalla versione firmware. Lo scopo del presente paragrafo è quello di illustrare la lista e le caratteristiche dei devices disponibili.
Il firmware versione 10 implementa i seguenti devices:
Nome device Tempo di campionamento
minimo (msec)Tempo di campionamento
massimo (msec)Tempo di esecuzione (%) CANOPEN 1 250 100 CALENDAR - - 0 DATASTORE 1 20 90,5 FREQ 1 250 4,75 DAC - - 0 ANINP 1 250 14,25 COUNTER3 1 250 5,94 SERCOM 1 250 9,26 MODBUS 1 250 32,07 MMIQ2 1 10 90,5 RECDATA 1 250 5,34 QMOS - - 0 Il firmware versione 20 implementa anche i seguenti devices:
Nome device Tempo di campionamento
minimo (msec)Tempo di campionamento
massimo (msec)Tempo di esecuzione (%) EANPOS 1 250 55,94 OOPOS3 1 250 27,91 HEAD2 1 125 23,75 Il firmware versione 30 implementa anche i seguenti devices:
Nome device Tempo di campionamento
minimo (msec)Tempo di campionamento
massimo (msec)Tempo di esecuzione (%) CAMMING3 1 250 55,94 JOINT1) 1 250 95,01
1) Il tempo di campionamento effettivo risulta essere doppio rispetta a quello impostatoParticolarità dei devices
CANOPEN
Se nella dichiarazione del device CANOPEN viene indicata la velocità zero allora essa diventa impostabile tramite i dip nr. 5 e 7 di SW1. Il primo slot per indirizzare risorse che risiedono all'interno di moduli Canopen è il 4.
DATASTORE
I files manipolati dal device DATASTORE sono tutti contenuti nella cartella /DS. Se questa cartella non esiste nel dispositivo essa viene creata automaticamente. Il device DATASTORE può operare sia con il dispositivo MMC/SD che con una memoria tipo NAND interna al prodotto (non removibile). Per definire con quale dispositivo operare viene utilizzato il valore del parametro priority (0=MMC/SD, 1=NAND). Se l'applicazione deve frequentemente accedere ai due dispositivi supportati e non è richiesta la rimozione fisica del dispositivo MMC/SD, è possibile utilizzare una particolare impostazione del parametro priority che evita di eseguire continuamente il MOUNT UMOUNT dei dispositivi. In pratica quando si desidera cambiare dispositivo prima di eseguire il comando UMOUNT si imposta “priority = -1”. Questo fa si che internamente al device la fase UMOUNT venga evitata rendendo il successivo comando MOUNT al medesimo dispositivo molto rapido.
Un esempio di codice QCL per cambiare dispositivo potrebbe essere:
SUB SETMMC WAIT NOT Mmc:st_busy IF Mmc:st_mount Mmc:priority = -1 UMOUNT Mmc WAIT NOT Mmc:st_mount CALL CHECK_ERR_WRN ENDIF Mmc:priority = 0 MOUNT Mmc WAIT Mmc:st_mount ENDSUB SUB SETNAND WAIT NOT Mmc:st_busy IF Mmc:st_mount Mmc:priority = -1 UMOUNT Mmc WAIT NOT Mmc:st_mount CALL CHECK_ERR_WRN ENDIF Mmc:priority = 1 MOUNT Mmc WAIT Mmc:st_mount CALL CHECK_ERR_WRN ENDSUB
Esiste una particolare impostazione dei parametri che permette di verificare l'esistenza di un file nel dispositivo. Si utilizza il parametro “filenum” impostato al valore -1 e con il comando OPENFILE il device invece di aprire il file ricerca il primo file presente nella directory “/DS/” del dispositivo scelto. Quando trovato, il nome di tale file sarà impostato dal device nel parametro “filenum” stesso (ed il tipo nel parametro “filetype”). Impostando nuovamente -1 in “filenum” ed eseguendo il comando OPENFILE verrà cercato il nome del file successivo e così via. Ogniqualvolta verrà effettuata una operazione di OPENFILE con il filenum diverso da -1 il loop di ricerca verrà chiuso. Quando la ricerca sarà terminata e non vi saranno più file presenti, allora il device imposterà come risposta al comando OPENFILE “filenum = -2”. L'avvenuta esecuzione del comando sarà segnalata dal flag st_busy = 0. Se l'estensione del file non è HEX o CSV il file stesso viene ignorato dalla ricerca. Nel caso in cui il nome file non sia compatibile con quelli gestiti dal DATASTORE (numeri da 0 a 9999999) allora “filenum” rimarrà impostato a -1 e verrà segnalato un warning.
RECDATA
Il device può memorizzare un massimo di 10000 step.
QMOS
Il parametro “frwuvalue01” contiene il valore numerico del serial number del prodotto.
FREQ
Per definire l'ingresso associato al device FREQ utilizzare l'apposito campo numerico nella dichiarazione del device. La disponibilità di ingressi in frequenza deve essere verifcata con la versione hardware del prodotto. Per ricavare la relazione tra valore numerico e pin del morsetto utilizzare le informazioni contenute nella colonna “Indirizzo” nelle tabelle di illustrazione del morsetto.
CAMMING3
I parametri relativi ai settori (CodeQm, CodeQs…) non sono ritentivi. All'accensione essi assumono sempre valore 0.
9. Accessori disponibili
-
-