Questa è una vecchia versione del documento!
MDO_P1P20F - 023 : Manuale dell'operatore
1. Informazioni
1.1 Release
Il presente documento è valido integralmente salvo errori od omissioni.
| |
|||
| Documento: | mdo_p1p20f-023 | ||
|---|---|---|---|
| Descrizione: | Manuale operatore p1p20f-023 | ||
| Redattore: | Omar Sbalchiero | ||
| Approvatore | Gabriele Bazzi | ||
| Link: | https://www.qem.eu/doku/doku.php/strumenti/qmoveplus/j1p20/p1p20f-023/mdo_p1p20f-023 | ||
| Lingua: | Italiano | ||
| Release documento | Descrizione | Note | Data |
| 01 | Nuovo manuale | 18/05/2021 | |
1.1.1 Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
2. Descrizione
La applicazione P1P20F - 023 è realizzata per permettere la programmazione di sequenze di posizionamenti di una coppia di assi.
Sono disponibili per la programmazione più di 50 istruzioni elementari e di facile comprensione. La composizione delle sequenze e la scelta delle istruzioni è realizzabile tramite il terminale operatore attraverso alcune pagine di selezione. Di seguito riportiamo le caratteristiche principali del software.
Tipi di comando:
-
Comandi relativi al posizionamento degli assi.
-
Comandi relativi al settaggio delle uscite.
-
Comandi relativi all'attesa del verificarsi di un evento.
-
Comandi relativi alla gestione dei passi della sequenza.
-
Comandi relativi ad operazioni su variabili.
3. Start-Up
3.1 Logo
![]()
Premendo il tasto  si accede alla funzione di Homing.
si accede alla funzione di Homing.
3.2 Homing

Per avviare la procedura di homing è necessario :
-
Abilitare l'homing

-
che non ci siano allarmi,
-
che lo stato macchina sia in MANUALE
-
premendo il selettore di START.

4. Pagina Principale
4.1 Manuale

 | Questo tasto è visibile solamente se a livello di SETUP la macchina è stata configurata per poter saltare l'operazione di homing. Se premuto per più di un secondo azzera il conteggio del relativo asse. |
4.2 Automatico

 | Questo tasto permette di abilitare il funzionamento della macchina per eseguire a STEP la sequenza in ciclo. Questo selettore non funziona se la macchina è in stato automatico ON. |
 | Se premuto per più di un secondo, questo tasto esegue un RESTART del programma selezionato. Questo tasto non funziona se la macchina è in stato automatico ON. |
  | Permettono di scorrere i passi del programma selezionato. Questi tasti non funzionano se la macchina è in stato automatico ON. |
4.3 Descrizione dei pulsanti
 | Sezione Pagina Allarmi |
 | Sezione di diagnostica I/O |
 | Sezione Programmi di Lavoro |
 | Sezione procedura di Homing |
| | Abilitazione sequenza a “Step” |
 | Sezione Dati Macchina |
5. Stati macchina
| | La macchina è in fase di homing. |
| | La macchina in manuale |
| | macchina in automatico - ciclo automatico fermo |
| | macchina in automatico - ciclo automatico in corso |
| | macchina in allarme |
6. Tasti Funzione e Led
| Tasto | Icona | Funzione | Led | Tasto | Icona | Funzione | Led |
|---|---|---|---|---|---|---|---|
| F1 |  | Manuale | - | F6 |  | Pagina allarmi | - |
| F2 |  | Automatico | - | F7 |  | Pagina precedente | - |
| F3 |  | Homing | - | - | - | - | - |
7. Utilizzo
7.1 Programmazione
E' possibile accedere alla sezione dei programmi di lavoro solo se non è in esecuzione un programma.
Per accedere alla sezione dei programmi di lavoro, premere il tasto

Alla pagina di programmazione è possibile avere accesso solamente quando lo stato macchina non è in automatico ON.
La pagina di programmazione permette di compilare una sequenza di istruzioni e di salvarla in una determinata zona della memoria.
Descrizione dei vari campi:
 | Questo campo modificabile stabilisce la zona di memoria di dove viene salvato il programma che si sta scrivendo. Il campo consente di inserire un valore da 1 a 100. |
 | In questa area viene visualizzata la sequenza in programmazione. Su ogni riga e possibile inserire un comando, il quale può comprendere fino a 3 variabili per la sua esecuzione, modificabili toccando sopra il valore di sfondo blu scuro. I passi impostabili per ogni sequenza sono al massimo 100. |
| | Permettono di scorrere i passi del programma selezionato. |
 | Override modificabile per limitare la velocità nei posizionamenti manuali. I posizionamenti manuali possono essere eseguiti sia tramite i relativi ingressi di Jog, sia tramite i tasti freccia presenti sul controllo sotto il display sulla sinistra. |
| | Accesso alla pagina degli allarmi e relativo storico. |
| | Questo tasto rappresenta un selettore di modalità jog in questa pagina di programmazione: N : normale, i comandi di jog si comportano come di norma, l'asse si muove finché non viene rilasciato il comando. 100 : i comandi di jog eseguono dei posizionamenti a quota attuale +/- 100. 10 : i comandi di jog eseguono dei posizionamenti a quota attuale +/- 10. 1 : i comandi di jog eseguono dei posizionamenti a quota attuale +/- 1. |
| | Inserisce una istruzione vuota sul passo attualmente selezionato, spostando tutte le istruzioni successive e incrementano il loro indice di 1. |
| | Cancella il passo attualmente selezionato, spostando tutte le istruzioni successive e decrementano il loro indice di 1. |
| | Tramite questo tasto è possibile andare a selezionare una delle istruzioni disponibili dal programma, su relative pagine. L'istruzione selezionata verrà caricata sul passo evidenziato. |
| | Inserisce sul passo selezionato una istruzione di posizionamento X, caricando come quota obiettivo il valore attuale dell'asse. |
| | Inserisce sul passo selezionato una istruzione di posizionamento Y, caricando come quota obiettivo il valore attuale dell'asse. |
| | Inserisce sul passo selezionato una istruzione di posizionamento contemporaneo di X e Y, caricando come quote obiettivo i valori attuali degli assi. |
| | Questo tasto permette di copiare una sequenza da una zona di memoria ad un'altra. |
| | Questo tasto permette di eliminare totalmente una sequenza da una zona di memoria. |
Per i valori inseriti in sequenza esiste una procedura di verifica per controllare non ci siano errori in compilazione; questa procedura viene eseguita ogni volta che si utilizzano i tasti di scorrimento dei passi e ogni volta che una azione comporta il passaggio ad una diversa schermata sul display. Se la verifica rileva degli errori, viene visualizzata sulla barra in alto, a fianco del simbolo dello stato della macchina, una bandierina gialla ![]() . Toccando questo simbolo si ha accesso ad una pagina di messaggistica, la quale mostra l'errore che ha generato questa anomalia.
. Toccando questo simbolo si ha accesso ad una pagina di messaggistica, la quale mostra l'errore che ha generato questa anomalia.
7.1.1 Libreria delle istruzioni
Tramite il tasto ![]() si accede a questa serie di pagine relative alla selezione del comando da inserire in sequenza sul passo selezionato.
si accede a questa serie di pagine relative alla selezione del comando da inserire in sequenza sul passo selezionato.
 |  |  |
 |  |
|
Le istruzioni disponibili sono suddivise in 5 categorie. Tramite i tasti  e
e  è possibile scorrere queste diverse schermate, e toccando su una istruzione si ritorna direttamente sulla pagina di programmazione, inserendo l'istruzione scelta sul passo corrente.
è possibile scorrere queste diverse schermate, e toccando su una istruzione si ritorna direttamente sulla pagina di programmazione, inserendo l'istruzione scelta sul passo corrente.
Il significato di tutte le istruzioni verrà descritto nel prossimo capitolo.
7.1.2 Copia di una sequenza
Tramite il tasto ![]() si accede alla pagina che permette di copiare interamente una sequenza da una zona di memoria ad un'altra.
si accede alla pagina che permette di copiare interamente una sequenza da una zona di memoria ad un'altra.

Premendo  si conferma la copia della sequenza.
si conferma la copia della sequenza.
Se l'indice selezionato come sequenza di destinazione rappresenta una sequenza già esistente in memoria, viene mostrato un messaggio di allerta riguardo a questa condizione.
7.1.3 Cancellazione di una sequenza
Tramite il tasto ![]() si accede alla pagina che permette di cancellare interamente una sequenza da una zona di memoria.
si accede alla pagina che permette di cancellare interamente una sequenza da una zona di memoria.

Premendo  si conferma la cancellazione della sequenza.
si conferma la cancellazione della sequenza.
7.1.4 Anomalie sulla sequenza
Tramite il simbolo ![]() si accede alla pagina che raccoglie tutti i messaggi riguardanti errori e segnalazioni sull'inserimento di istruzioni in una sequenza.
si accede alla pagina che raccoglie tutti i messaggi riguardanti errori e segnalazioni sull'inserimento di istruzioni in una sequenza.

Per ogni anomalia viene assegnata una data e un'ora, un indice di errore e su par1 viene visualizzato l'eventuale passo dove si è verificato.
I messaggi visualizzati sono:
| VELX:E' stata impostata una vel. nulla | Su comando VELX non è stata assegnata nessun valore di velocità. |
| VELY:E' stata impostata una vel. nulla | Su comando VELY non è stata assegnata nessun valore di velocità. |
| CALL: Funzione non esistente | Su comando CALL, il valore inserito non rappresenta nessuna funzione. |
| GOTO: Passo non esistente | Su comando GOTO, il valore inserito è un indice rappresentante nessuna istruzione. |
| JMPSUB: programma non esistente | Su comando JMPSUB, il valore inserito è un indice rappresentante una sequenza inesistente. |
| JMPPRG: programma non esistente | Su comando JMPPRG, il valore inserito è un indice rappresentante una sequenza inesistente. |
| Ingresso non programmabile | Su comando WAITIS, WAITID, WAITION, WAITIOFF, IFION, IFIOFF il valore inserito è un indice rappresentante un ingresso non programmabile. |
| Uscita non programmabile | Su comando ON, OFF, TON, TOFF, BLINK il valore inserito è un indice rappresentante una uscita non programmabile. |
| Registro inesistente | Su comando XN, YN, XYN, XYNI, ASSQX, ASSQY, SOMMAVX, SOMMAVY il valore inserito è un indice rappresentante un registro di variabili non esistente |
| Variabile locale inesistente | Su comando IFEQ, ASSV, SOMMA, SOMMAVX, SOMMAVY il valore inserito è un indice rappresentante una variabile non esistente. |
| Eseguire la procedura di HOMING | Questo messaggio non riguarda alcuna istruzione. Viene visualizzato quando si cerca di avviare una sequenza, senza aver fatto ancora la procedura di HOMING |
Le azioni possibili sono:
| | Se premuto per più di un secondo, questo tasto permette di eliminare tutte le segnalazioni registrate. |
  | Permettono di scorrere le anomalie registrate nelle diverse pagine. |
7.2 Dati macchina

In questa pagina vengono visualizzate tutte e 5 le variabili locali di appoggio alla sequenza in corso.
Il tasto  permette di accedere all'area tecnica di configurazione della macchina tramite una password
permette di accedere all'area tecnica di configurazione della macchina tramite una password
7.3 Allarmi
Tramite il tasto , il simbolo ![]() oppure il tasto funzione
oppure il tasto funzione  si accede alla pagina che visualizza la lista di allarmi attuali.
si accede alla pagina che visualizza la lista di allarmi attuali.

Per ogni allarme viene assegnata una data e un'ora, un indice di errore e due parametri per eventualmente specificare nel dettaglio l'anomalia visualizzata.
Gli allarmi che si possono verificare sono:
| Finecorsa HW massimo X | Superato il finecorsa hardware di corsa massima per l’asse X. |
| Finecorsa HW minimo X | Superato il finecorsa hardware di corsa minima per l’asse X. |
| Finecorsa HW massimo Y | Superato il finecorsa hardware di corsa massima per l’asse Y. |
| Finecorsa HW minimo Y | Superato il finecorsa hardware di corsa minima per l’asse Y. |
| Emergenza manuale | Mancanza dell'ingresso di emergenza. |
| Errore di inseguimento X | L’asse X ha avuto un errore di inseguimento (foller) superiore al maxfoller. Possibile fuga dell’asse. |
| Errore di inseguimento Y | L’asse Y ha avuto un errore di inseguimento (foller) superiore al maxfoller. Possibile fuga dell’asse. |
| Passo non eseguibile | Tentativo di eseguire un passo non programmato correttamente. Su par1 viene visualizzato l'indice di sequenza in errore. Su par2 viene visualizzato l'indice del passo in errore. |
Le azioni possibili sono:
| | Ad ogni pressione elimina l'ultimo allarme presente in lista. Se premuto per più di un secondo, elimina tutti gli allarmi in lista.. |
| | Permettono di scorrere gli allarmi presenti nelle diverse pagine. |
 | Permette di entrare nella pagina di storico degli allarmi. |
7.3.1 Storico degli allarmi

In questa pagina vengono archiviati tutti gli allarmi che si sono verificati nel funzionamento della macchina.
Le azioni possibili sono:
| | Se premuto per più di un secondo, elimina tutte le segnalazioni dallo storico. |
| | Permettono di scorrere le segnalazioni presenti nelle diverse pagine. |
7.4 Diagnostica
Per accedere alla diagnostica, dalla pagina di Principale premere il tasto
Viene visualizzata la seguente pagina:

Da questa pagina è possibile accedere alle varie sezioni di diagnostica presenti:
 | Ingressi digitali |
 | Uscite digitali |
 | Conteggi |
 | Uscite analogiche |
Per tornare alla Pagina Principale premere il tasto 
7.4.1 Ingressi digitali
Per accedere alla pagina di diagnostica degli Ingressi Digitali, premere il tasto
Viene visualizzata la seguente pagina:


Per tornare al menù di DIAGNOSTICA premere il tasto
7.4.2 Uscite digitali
Per accedere alla pagina di diagnostica delle Uscite Digitali, premere il tasto
Viene visualizzata la seguente pagina:


Forzatura delle uscite
Per accedere alla funzione di forzatura delle uscite:
-
Indirizzare il tasto
 verso
verso  → Funzione attiva
→ Funzione attiva -
Premere sull'uscita per attivarla. Ripremere per disattivarla.
-
Indirizzare il tasto
 verso
verso  → Funzione disattiva
→ Funzione disattiva -
All'uscita dalla pagina la funzione si disattiva automaticamente.




Per tornare al menù di DIAGNOSTICA premere il tasto
7.4.3 Conteggi
Per accedere alla pagina di diagnostica dei Conteggi, premere il tasto
Viene visualizzata la seguente pagina:

Viene visualizzato per ogni asse il conteggio in impulsi encoder.
In piccolo viene inoltre visualizzato il valore del conteggio in unità di misura, e sulla destra vengono visualizzati i registri relativi ai valori istantanei di feed-forward, parte proporzionale, parte integrale ed errore di inseguimento.
Per tornare al menù di DIAGNOSTICA premere il tasto
7.4.4 Uscite analogiche
Per accedere alla pagina di diagnostica delle Uscite analogiche, premere il tasto
Viene visualizzata la seguente pagina:

Viene visualizzato per ogni asse il valore della tensione in uscita, espressa in decimi di Volts.
Per tornare al menù di DIAGNOSTICA premere il tasto
8. Istruzioni programmabili
A seguire vengono descritte tutte le istruzioni utilizzabili in sequenza.
La colonna T prende i seguenti significati:
-
M : istruzione di tipo “modale” (valida dal passo in cui è inserita per tutto il resto della sequenza).
-
S : istruzione di tipo “singolo” (valida nel solo passo in cui è inserita).
8.1 Posizionamento degli assi
| Istruzione | T | Argomento/i | Descrizione |
|---|---|---|---|
 | S | Quota X | Muove l'asse X dalla posizione in cui si trova alla posizione “Quota X” specificata numericamente. |
 | S | n | Muove l'asse X dalla posizione in cui si trova alla posizione memorizzata nel registro il cui indice è contenuto nella variabile locale n. |
 | S | Quota Y | Muove l'asse Y dalla posizione in cui si trova alla posizione “Quota Y” specificata numericamente. |
 | S | n | Muove l'asse Y dalla posizione in cui si trova alla posizione memorizzata nel registro il cui indice è contenuto nella variabile locale n. |
 | S | Quota X, Quota Y | Muove l'asse X,Y dalla posizione in cui si trovano alla posizione “Quota X, Quota Y” in modo contemporaneo: l'asse che percorre lo spazio più lungo mantiene la sua velocità impostata e l'altro asse si adegua di conseguenza. |
 | S | nX, nY | Muove l'asse X,Y dalla posizione in cui si trovano alla posizione memorizzata nei registri il cui indice è contenuto nelle variabili locali nX e nY. |
 | S | Quota X, Quota Y | Muove un utensile vincolato ai due assi alle quote specificate in modo interpolato. |
 | S | nX, nY | Muove l'asse X,Y in modo interpolato dalla posizione in cui si trovano alla posizione memorizzata nei registri il cui indice è contenuto nelle variabili locali nX e nY. |
 | S | - | Arresta in rampa l'asse X. |
 | S | - | Arresta in rampa l'asse Y. |
 | M | Vel X | Imposta una velocità assoluta (Vel X) per l'asse X. |
 | M | Vel X | Imposta una velocità percentuale (Vel X) per l'asse X. |
 | M | Vel Y | Imposta una velocità assoluta (Vel Y) per l'asse Y. |
 | M | Vel Y | Imposta una velocità percentuale (Vel Y) per l'asse Y. |
 | M | Vel I | Imposta una velocità assoluta (Vel I) per il posizionamento interpolato. |
 | S | - | Comando di ricerca di zero dell'asse X da sequenza con la modalità impostata in setup. |
 | S | - | Comando di ricerca di zero dell'asse Y da sequenza con la modalità impostata in setup. |
I posizionamenti degli assi vengono eseguiti tramite un profilo trapezoidale con una fase di accelerazione lineare, una fase a velocità costante e una fase di decelerazione lineare.
Le istruzioni per il posizionamento degli assi si dividono in:
-
Posizionamenti singoli (X, XN, Y, YN).
-
Posizionamenti multipli (XY, XYN, XYI, XYIN).
8.1.1 Posizionamenti singoli
I posizionamenti singoli consistono nel posizionare un asse singolo (X o Y) alla quota specificata nel passo programmato oppure alla quota contenuta nel registro con indice specificato. La velocità di posizionamento per default è quella massima dell’asse in questione.
8.1.2 Posizionamenti multipli
I posizionamenti multipli si suddividono in:
-
Posizionamenti multipli contemporanei (XY, XYN);
-
Posizionamenti multipli interpolati (XYI, XYIN).
Nei posizionamenti multipli gli assi partono dalla posizione in cui si trovano e raggiungono la posizione con coordinate specificate come argomento. Tali coordinate possono essere espresse direttamente come valore oppure possono essere contenute in uno dei registri predisposti per ogni asse.
I posizionamenti multipli contemporanei vengono realizzati muovendo alla massima velocità l’asse che deve compiere più spazio, mentre l’asse che deve compiere meno spazio si adegua posizionandosi con una velocità inferiore. In tal modo il posizionamento dei due assi si conclude in modo quasi contemporaneo. Si dice “quasi” dato che non si tiene conto della parte di accelerazione e di decelerazione e quindi il posizionamento risultante può non risultare perfettamente rettilineo tra il punto di partenza e il punto di arrivo (vedi figura di esempio). La velocità di posizionamento per default è quella massima.
I posizionamenti multipli interpolati vengono realizzati calcolando le velocità da assegnare ai due assi in modo che la velocità di posizionamento risultante di un ipotetico utensile vincolato ai due assi sia quella specificata tramite l’istruzione VELXYI. Se non viene specificata la velocità di interpolazione, per default si utilizza la velocità minima tra le due velocità massime degli assi. In questo posizionamento viene tenuto conto anche delle fasi di accelerazione e di decelerazione del posizionamento.
Queste due fasi vengono modificate in modo che entrambi gli assi concludano la accelerazione (o decelerazione) nello stesso istante. In questo modo la traiettoria tra punto di partenza e punto di arrivo risulta essere rettilinea (vedi figura).
8.2 Settaggio delle uscite
| Istruzione | T | Argomento/i | Descrizione |
|---|---|---|---|
 | M | n | Attiva l'uscita “n”. |
 | M | n | Disattiva l'uscita “n”. |
 | M | n, V | Lampeggia l'uscita “n” con un periodo di lampeggio pari al valore “V” espresso in ms. |
 | M | n, V | Attiva l'uscita “n” dopo un periodo di attesa pari al valore “V” espresso in ms. |
 | M | n, V | Disattiva l'uscita “n” dopo un periodo di attesa pari al valore “V” espresso in ms. |
8.3 Attese di eventi
| Istruzione | T | Argomento/i | Descrizione |
|---|---|---|---|
 | M | - | Abilita l'attesa che gli assi concludano sempre il posizionamento prima di passare al passo successivo, è abilitato di default. |
 | M | - | Abilita l'attesa che l'asse X concluda sempre il posizionamento prima di passare al passo successivo. |
 | M | - | Abilita l'attesa che l'asse Y concluda sempre il posizionamento prima di passare al passo successivo. |
 | M | - | Disabilita le funzioni WAITSXY, WAITSX e WAITSY. |
 | S | - | Attende il concludersi del posizionamento in corso per l'asse X prima di passare al passo successivo. (Versione singola dell'istruzione WAITSX) Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse X è disattivata. |
 | S | - | Attende il concludersi del posizionamento in corso per l'asse Y prima di passare al passo successivo. (Versione singola dell'istruzione WAITSY) Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse Y è disattivata. |
 | S | Quota X | Attende che l'asse X abbia raggiunto una quota maggiore di quella impostata. Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse X è disattivata. |
 | S | Quota X | Attende che l'asse X abbia raggiunto una quota minore di quella impostata. Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse X è disattivata. |
 | S | Quota Y | Attende che l'asse Y abbia raggiunto una quota maggiore di quella impostata. Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse Y è disattivata. |
 | S | Quota Y | Attende che l'asse Y abbia raggiunto una quota minore di quella impostata. Questa istruzione viene utilizzata quando l'attesa della conclusione del posizionamento dell'asse Y è disattivata. |
 | S | n | Attende il fronte di salita dell'ingresso “n”. |
 | S | n | Attende il fronte di discesa dell'ingresso “n”. |
 | S | n | Attende lo stato ON (contatto chiuso) dell'ingresso “n”. |
 | S | n | Attende lo stato OFF (contatto aperto) dell'ingresso “n”. |
 | S | Timer | Attende lo scadere di un Timer impostato come argomento dell'istruzione. |
8.4 Gestione sequenza passi
| Istruzione | T | Argomento/i | Descrizione |
|---|---|---|---|
 | M | - | E' il comando che conclude la sequenza in corso. |
 | S | n | Richiama una funzione “custom” memorizzata nel codice QCL. L'applicativo di norma non ha nessuna di queste funzioni, ma esiste già un task vuoto per la eventuale gestione di queste procedure. |
 | S | n | Salta dal passo dove si trova al passo “n”. |
 | S | n | Salta ad un programma (sequenza) “n”. Una volta terminato il programma richiamato, l'esecuzione ritorna al programma chiamante. |
 | S | n | Salta ad un programma (sequenza) “n”. Una volta terminato non ritorna al programma chiamante. Nel momento in cui si chiama un programma, vengono impostati tutti quanti i parametri di default: velocità, modalità di attesa dei posizionamenti, … . |
 | S | n, V, N | Confronto tra due valori: quello contenuto nella variabile locale “n” e quello inserito con valore “V”. Se sono uguali salta al passo “N”. |
 | S | In, N | Salta al passo “N” se l'ingresso “In” è un contatto chiuso. |
 | S | In, N | Salta al passo “N” se l'ingresso “In” è un contatto aperto. |
Nelle figure seguenti riportiamo una esemplificazione grafica delle due istruzioni “JMPSUB n” e “JMPPRG n”.
Una sequenza può essere richiamata con JMPSUB da un’altra sequenza ed essa a sua volta può richiamarne un’altra. Questo annidamento non è infinito ma può essere ripetuto per un massimo di 5 volte.
8.5 Gestione delle variabili
| Istruzione | T | Argomento/i | Descrizione |
|---|---|---|---|
 | S | n, Quota X | Assegna la quota per l'asse X al registro “n” relativo all'asse X. |
 | S | n, Quota Y | Assegna la quota per l'asse Y al registro “n” relativo all'asse Y. |
 | S | n | Salta dal passo dove si trova al passo “n”. |
 | S | n | Salta ad un programma (sequenza) “n”. Una volta terminato il programma richiamato, l'esecuzione ritorna al programma chiamante. |
 | S | n | Salta ad un programma (sequenza) “n”. Una volta terminato non ritorna al programma chiamante. Nel momento in cui si chiama un programma, vengono impostati tutti quanti i parametri di default: velocità, modalità di attesa dei posizionamenti, … . |
 | S | n, V, N | Confronto tra due valori: quello contenuto nella variabile locale “n” e quello inserito con valore “V”. Se sono uguali salta al passo “N”. |
 | S | In, N | Salta al passo “N” se l'ingresso “In” è un contatto chiuso. |
 | S | In, N | Salta al passo “N” se l'ingresso “In” è un contatto aperto. |
Nelle figure seguenti riportiamo una esemplificazione grafica delle due istruzioni “JMPSUB n” e “JMPPRG n”.
Una sequenza può essere richiamata con JMPSUB da un’altra sequenza ed essa a sua volta può richiamarne un’altra. Questo annidamento non è infinito ma può essere ripetuto per un massimo di 5 volte.
8.6 Storico allarmi
In questa pagina è visualizzato lo storico degli ultimi 200 allarmi intervenuti.
Per ogni allarme è indicata la data e l'ora di intervento.
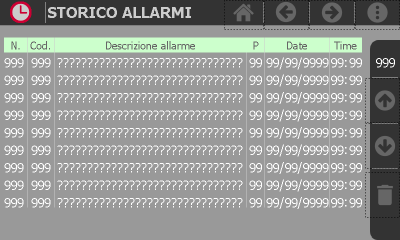
 | Scorre verso l'alto. |
 | Scorre verso il basso. |
 | Cancellazione storico. |
 | Passaggio alla pagina degli allarmi. |
9. Info di sistema
Per accedere alla sezione delle info di sistema:
1. premere il tasto MENU sulla barra in alto 
2. accedere alla funzione con il tasto apposito 
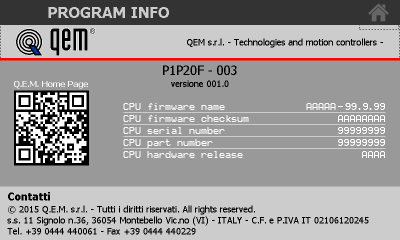
Sono elencate le info di diagnostica delle CPU, più altre informazioni utili all'identificazione dello strumento, il software installato e come contattare la casa produttrice.
| CPU firmware name | Versione del firmware |
| CPU firmware checksum | Checksum del firmware |
| CPU serial number | Serial number della CPU installata |
| CPU part number | Part number della CPU installata |
| CPU hardware release | Release hardware della CPU installata |
10. Assistenza
Per poterti fornire un servizio rapido, al minimo costo, abbiamo bisogno del tuo aiuto.
 |  |
| Segui tutte le istruzioni fornite nel manuale MIMAT | Se il problema persiste, compila il “Modulo richiesta assistenza” nella pagina Contatti del sito www.qem.it. I nostri tecnici otterranno gli elementi essenziali per comprendere il tuo problema. |
Riparazione
Per poterVi fornire un servizio efficente, Vi preghiamo di leggere e attenerVi alle indicazioni qui riportate
Spedizione
Si consiglia di imballare lo strumento con materiali in grado di assorbire eventuali cadute.
 |  |  |
| Utilizzare l'imballo originale: deve proteggere lo strumento durante il trasporto. | Allega: 1. Una descrizione dell'anomalia; 2. Parte dello schema elettrico in cui è inserito lo strumento 3. Programmazione dello strumento (setup, quote di lavoro, parametri…). | Una descrizione approfondita del problema ci consentirà di identificare e risolvere rapidamente il tuo problema. Un accurato imballaggio eviterà ulteriori inconvenienti. |