Questa è una vecchia versione del documento!
MDI_P1P44F-010: Manuale installatore
 |  |
1. Informazioni
1.1 Release
| |
|||
| Documento: | mdi_p1p44f-010 | ||
|---|---|---|---|
| Descrizione: | Manuale dell'installatore p1p44f-010 | ||
| Redattore: | Michele Sandri | ||
| Approvatore | Gabriele Bazzi | ||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/qmoveplus/j1p44/p1p44f-010/mdi_p1p44f-010 | ||
| Lingua: | Italiano | ||
| Release documento | Descrizione | Note | Data |
| 01 | Nuovo manuale | 27/08/2019 | |
Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
2. Hardware
| J1-P44-FB20 | |
|---|---|
 |
|
 |
|
 | J1-P44-Fx:Manuale di Installazione e Manutenzione |
| RMC-1SC01E1/DP1/24Vdc | |
|---|---|
 |
|
 |
|
| | RMC-1SC01:Manuale di Installazione e Manutenzione |
2.1 Tasti Funzione e LED
| Tasto | Icona | Funzione | Led | Tasto | Icona | Funzione | Led |
|---|---|---|---|---|---|---|---|
| F1 |  | Start ciclo | - | F4 |  | Semiautomatico = ON | Semiautomatico attivo |
| F2 |  | Stop ciclo | - | F5 |  | Alarm = ON | Presenza allarme |
| F3 |  | Restart | - | F6 |  | Uscita | - |
| - - - - | - - - - | - - - - | - - - - | - - - - | - - - - | - - - - | - - - - |
2.2 Simboli e tasti
| Buttone | Descrizione | ———————– | Simboli barra superiore | Descrizione |
|---|---|---|---|---|
| | Premere per confermare | | In inizializzazione | |
| | Selezione | | Emergenza | |
 | Pagina precedente | | Manuale | |
 | Pagina successiva | | Homing attivo | |
 | Area riservata | | Semiautomatico | |
| | Apri file da USB | | Automatico - ciclo OFF | |
| | Salva | | Automatico - ciclo ON | |
 | Anteprima lavorazione | | Modalità taratura | |
| | Setup Protetto/Sprotetto | |||
| | I dati in giallo sono modificabili | |||
2.3 Startup
| START | | OPPURE  per uscire |
 |
||
| HOMING |  | OPPURE F6 per uscire |
| |
||
| MENU PRINCIPALE |  | |
2.3.1 Delta errore Homing
Con questo dato si indica il Delta Errore rispetto all'homing precedente, con questo valore si potrà controllare facilmente se un encoder è buono oppure è guasto.
Procedura:
-
fare un homing 1)
-
muovere l'asse in manuale, numerose volte avanti e indietro
-
poi, senza spegnere la macchina, rifare l'homing
-
il secondo homing farà assumere a questo numero, un significato “importante”, ovvero: ci informerà di quanto è lo scostamento del conteggio rispetto alla posizione fisica reale della macchina
-
Se l'encoder conta bene, questo scostamento dovrà essere = 0
-
Poi, nella pratica, questo numero probabilmente non sempre sarà proprio = 0 a causa dalla tolleranza del fine corsa utilizzato per fare l'homing
-
Ripetendo l'homing diverse volte però, ci si potrà rendere conto se il numero evidenzia un encoder guasto, oppure un errore dato dalla tolleranza del fine corsa
-
un errore piccolo abbastanza ripetitivo, evidenza la tolleranza del fine corsa
-
un errore grande, denuncerà con evidenza, un problema all'encoder
2.3.2 IP default Ethernet
192.168.0.253
3. SETUP
F6  | | |||
 |  |
|||
 PASSWORD 462 |  |
|||
 | Parametri di SETUP | ||
 | Calibrazione assi | ||
 | Carica i parametri di default | ||
| | Diagnostica | ||
| | Sblocca area di setup Disabilita la password fino al riavvio | | Blocca area di setup Accesso solo con password |
 | Imposta data e ora del sistema | ||
| - - - - | - - - - | - - - - | - - - - |
3.1 Carica parametri di default
| F6 | | |||
| | |
|||
| PASSWORD 462 | |
|||
| |
||||
 |
||||
| SI Carica Default | NO Cancella |
|||
4. Parametri di SETUP
| F6 | |
|||
| | |
|||
| PASSWORD462 | |
|||
| |
||||
 |
||||
4.1 Parametri Generici
GEN.  | | Per confermare  |
| Parametro | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PG-01 : PUNTI DECIMALI X/Y/Z | - | 1 | 0 - 2 | Numero di punti decimali per le posizioni degli assi X, Y e Z Per i pollici le posizioni sono visualizzate con “PUNTI DECIMALI + 1”. |
| PG-02 : PUNTI DECIMALI W | - | 2 | 0 - 2 | Numero di punti decimali per la posizione dell'asse W |
| PG-03 : | - | - | - | Parametro non utilizzato |
| PG-04 : LINGUA | - | 1 | 1 - 2 | 1: Inglese 2: Italiano |
| PG-05 : UNITA' DI MISURA | - | 0 | 0 - 1 | 0: mm 1: pollici Tutti i parametri di setup sono espressi in mm. |
| PG-06 : MAX RPM DISCO | rpm | 2480 | 0 - 3000 | RPM del disco con comando dell'inverter = 10 Volt. |
| PG-07 : TIMER LASER | s | 30 | 0 - 9999 | Tempo di accensione del laser. |
| PG-08 : TIMER FLUSSOSTATO 1 | s | 5 | 0 - 9999 | Se l'acqua viene a mancare per un tempo superiore a quanto programmato: - nel ciclo automatico, viene attivato lo stato di Stand-By - nel manuale, viene attivato l'allarme |
| PG-09 : TIMER FLUSSOSTATO 2 | s | 60 | 0 - 9999 | Con la macchina nello stato di Stand-By, dopo il tempo programmato, viene attivato l'allarme. |
| PG-10 : TIMER PRESSOSTATO | s | 5 | 0 - 9999 | Scaduto il tempo programmato di mancanza aria, viene attivato l'allarme. |
| PG-11 : TIMER PRESSIONE OLIO | s | 5 | 0 - 9999 | Scaduto il tempo programmato di mancanza olio, viene attivato l'allarme. |
| PG-12 : TIMER ASSORBIMENTO CORRENTE | s | 1 | 0 - 9999 | Se la corrente del disco supera il valore MASSIMA CORRENTE PG-19 viene attivato l'allarme. |
| PG-13 : BUZZER HMI | - | 0 | 0 - 1 | 0: buzzer abilitato 1: buzzer disabilitato. |
| PG-14 : TIMER SIRENA | s | 10 | 0 - 999 | Durata della segnalazione di allarme. |
| PG-15 : MODO HOMING | - | 1 | 0 - 3 | 0: Homing necessario per abilitare tutte le altre operazioni; 1: Homing non necessario, tutte le funzioni sono abilitate; 2: Homing necessario per abilitare il ciclo automatico, altrimenti sono abilitati solo i movimenti in manuale, 3: Homing disabilitato. |
| PG-16 : SEQUENZA DI HOMING | - | 0 | 0 - 1 | 0: homing di un asse alla volta; 1: dopo l'homing dell'asse Z, X, Y e W partono contemporaneamente. |
| PG-17 : HDR | - | 0 | 0 - 2 | 0: Visualizzazione standard 1: Visualizzazione più precisa, ovvero: che approssima lo spazio non visibile all'unità 2: Visualizzazione più precisa, ovvero: che approssima lo spazio non visibile all'unità |
| PG-18 : MINIMO VALORE DEGLI INGRESSI ANALOGICI | bit | 5 | 0 - 1000 | Sotto questo valore, gli ingressi analogici sono valutati = 0. |
| PG-19 : MASSIMA CORRENTE | A | 100.0 | 0 - 999.9 | Valore di corrente, con ingresso analogico = 10 Volt. |
| PG-20 : VISUALIZZAZIONE RPM | - | 0 | 0 - 1 | 0: RPM visualizzati con l'ingresso analogico di Feedback (RPM virtuali); 1: RPM visualizzati con l'ingresso analogico di Feedback 10 Volt fornito dall'inverter (RPM quasi reali) |
| PG-21 : MODO ATTIVAZIONE DISCO 1) | - | 0 | 0 - 1 | 0: Consenso. L'uscita O59 rimane attiva se la macchina non è in emergenza ; 1: ON/OFF. l'uscita O59 viene comandata dallo start e stop disco (I12 e I13) |
| PG-22 : TIMER DISCO A REGIME | s | 0 | 0 - 9999 | Timer di attesa di avvio del ciclo automatico affinché il disco il disco raggiunga la velocità programmata. Usato se PG-21 = 1 |
| PG-23 : TIMER CAMBIO VELOCITA' DISCO | s | 3 | 0 - 9999 | Timer di attesa quando viene cambiata la direzione di rotazione del disco. |
| PG-24 : SPINE BANCO | - | 0 | 0 - 1 | Abilitazione dell'inserimento delle spine coniche a fine movimento della Tavola. |
| PG-25 : TIMER SPINE | s | 2 | 0 - 9999 | Timer di attesa per il disinserimento delle spine, dopo il quale può avvenire il movimento dell'asse W. |
| PG-26 : JOG ASSE X | - | 0 | 0 - 1 | Modalità di azionamento del jog asse X. 0: Il jog si attiva sul fronte di salita dell'ingresso e si disattiva sul fronte di discesa; 1: Il jog si attiva all'attivazione dell'ingresso e si disattiva con il successivo fronte di salita |
| PG-27 : STOP 0 JOG ASSE Z | - | 0 | 0 - 1 | Abilitazione della fermata a quota 0 relativa, durante il jog dell'asse Z. |
| PG-28 : TIMER FINE PROGRAMMA | min | 20 | 0 - 9999 | Ritardo spegnimento uscita di fine programma (O47). Utilizzato per lo spegnimento notturno della macchina. |
| PG-29 : TIMER ATTIVAZIONE AUSILIARI | s | 2 | 0 - 9999 | Utilizzato all'accensione dello strumento, è un tempo di attesa, dopo il quale vengono testati tutti gli ingressi. |
| PG-30 : MODO VELOCE ASSI | - | 0 | 0 - 1 | 0: comando di jog, dopo 3 sec. gli assi Y, Z e W sono mossi in veloce; 1: all'attivazione dell'ingresso I14, dopo 3 sec. gli assi Y, Z e W sono mossi in veloce |
| PG-31 : TIMER LUBRIFICAZIONE ON | s | 0 | 0 - 9999 | Timer di attivazione uscita di lubrificazione O58. |
| PG-32 : TIMER LUBRIFICAZIONE OFF | min | 0 | 0 - 9999 | Timer di attesa tra un'attivazione e l'altra dell'uscita di lubrificazione O58. |
| PG-33 : UTILIZZO POTENZIOMETRI ASSE X | - | 0 | 0 - 1 | 0: i potenziometri sono sempre attivi ; 1: i potenziometri sono utilizzati solamente quando l'asse X sta tagliando |
4.2 Setup asse X
| X SETUP  | | Per confermare |
| Parametro | U.M. | Default | Range | Descrizione | |
|---|---|---|---|---|---|
| PX-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PX-02. | |
| PX-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PX-01. PX-01/PX-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
|
| PX-03 : TOLLERANZA | mm | 0.50 | 0 - 999.99 | Spazio entro il quale il posizionamento è considerato corretto. | |
| PX-04 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di ritardo tra il comando direzione oraria/antioraria e il comando dell'uscita analogica, necessario solo quando si comanda l'inverter con segnale 0-10 Volt (PX-44 = 1). | |
| PX-05 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo che si attiva nel momento dell'attivazione del finecorsa (I52 o I53) al termine del quale l'uscita analogica viene portata a 0 Volt. Necessario affinché l'asse superi il finecorsa in modo che la sua attivazione sia stabile. | |
| PX-06 : RALLENTAMENTO | mm | 50.0 | 0 - 99999.9 | Spazio necessario all'asse per rallentare la velocità. | |
| PX-07 : INERZIA AVANTI | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Avanti”, prima della fine del posizionamento. | |
| PX-08 : INERZIA INDIETRO | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Indietro”, prima della fine del posizionamento. | |
| PX-09 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
|
| PX-10 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo di attesa che l'asse si sia fermato, per attivare il controllo dello spazio di tolleranza. | |
| PX-11 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
|
| PX-12 : OLTREQUOTA | mm | 0 | 0 - 9999.9 | Oltrequota per il recupero giochi. | Spazio considerato con PX-11 = 1-2-3-4. Con PX-11 = 0 tale spazio non viene considerato. |
| PX-13 : VELOCITA' MASSIMA | m/min | 15.0 | 5.0 - 20.0 | Massima velocità dell'asse con comando analogico 10 Volt. | |
| PX-14 : VELOCITA' MINIMA | m/min | 0.1 | 1.0 - 10.0 | Minima velocità dell'asse quando i potenziometri sono sotto la soglia minima (vedi parametro PG-18). | |
| PX-15 : VELOCITA' RAPIDA IN AUTOMATICO | m/min | 10.0 | 0 - 20.0 | Massima velocità in automatico % sui 10 Volt di comando. | |
| PX-16 : VELOCITA' LENTA IN AUTOMATICO | m/min | 5.0 | 0 - 20.0 | Minima velocità in automatico % sui 10 Volt di comando. | |
| PX-17 : VELOCITA' RAPIDA IN MANUALE | m/min | 10.0 | 0 - 20.0 | Jog rapido. | % della Velocità massima PX-13 |
| PX-18 : VELOCITA' LENTA IN MANUALE | m/min | 5.0 | 0 - 20.0 | Jog lento. | |
| PX-19 : VELOCITA' RAPIDA IN HOMING | m/min | 10.0 | 0 - 20.0 | Prima velocità Homing. | |
| PX-20 : VELOCITA' LENTA IN HOMING | m/min | 1.0 | 0 - 20.0 | Velocità Homing nel momento del caricamento del conteggio. | |
| PX-21 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
|
| PX-22 : OFFSET HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione alla quale viene comandato l'asse, dopo aver fatto l'Homing. | |
| PX-23 : TIPO HOMING | - | 0 | 0 - 3 | 0: Carica la posizione scritta sul parametro PX-22 quando il sensore viene rilasciato. 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PX-22 sul segnale di zero encoder. 2: (Homing con il Jog) Con l'ingresso I59 = ON (Camma di zero Asse X), viene caricato il valore PX-22 sul conteggio. 3: Homing disabilitato. |
|
| PX-24 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0: asse direzione + 1: asse direzione - |
|
| PX-25 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota massima. | |
| PX-26 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota minima. | |
| PX-27 : MINIMO SPOSTAMENTO | mm | 1 | 0 - 999.9 | Spazio di controllo del feedback dell'encoder dopo il tempo PX-28. | Questi parametri, servono per determinare se l'encoder lavora bene e se il cavo di collegamento è integro |
| PX-28 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Tempo nel quale l'asse deve compiere lo spazio PX-27. | |
| PX-29 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
|
| PX-30 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa attivazione del freno, dopo che il comando di movimento asse è OFF. | |
| PX-31 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. | |
| PX-32 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. | |
| Modalità posizionamento ad impulsi |
|||||
| PX-33 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
|
| PX-34 : QUOTA DI AVVICINAMENTO | mm | 0.30 | 0 - 9999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. | |
| PX-35 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. | |
| PX-36 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. | |
| PX-37 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. | |
| PX-38 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. | |
| Varie |
|||||
| PX-39 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
|
| PX-40 : TIPO RALLENTAMENTO | - | 0 | 0 - 2 | Calcolo del rallentamento: 0: fisso con parametro PX-06 1: proporzionale alla velocità rilevata 2: proporzionale al quadrato della velocità rilevata |
|
| PX-41 : RALLENTAMENTO MASSIMO | mm | 0 | 0 - 9999.9 | Massimo rallentamento alla massima velocità PX-13. | Sono considerati solo quanto PX-40 è impostato a 1 o 2 (rallentamento calcolato dallo strumento) |
| PX-42 : RALLENTAMENTO MINIMO | mm | 0 | 0 - 9999.9 | Minimo rallentamento che può essere utilizzato. | |
| PX-43 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo tra la disattivazione di un'uscita di movimento in una direzione e l'attivazione di un'uscita di movimento nella direzione opposta. | |
| PX-44 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica +/-10Vdc 1: uscita analogica 0-10Vdc |
|
| PX-45 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
|
4.3 Setup asse Y
| Y SETUP  | | Per confermare |
| Parametro | U.M. | Default | Range | Descrizione | |
|---|---|---|---|---|---|
| PY-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PY-02. | |
| PY-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PY-01. PY-01/PY-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
|
| PY-03 : TOLLERANZA | mm | 0.50 | 0 - 999.99 | Spazio entro il quale il posizionamento è considerato corretto. | |
| PY-04 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di ritardo tra il comando direzione oraria/antioraria e il comando dell'uscita analogica, necessario solo quando si comanda l'inverter con segnale 0-10 Volt (PY-44 = 1). | |
| PY-05 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo che si attiva nel momento dell'attivazione del finecorsa (I54 o I55) al termine del quale l'uscita analogica viene portata a 0 Volt. Necessario affinché l'asse superi il finecorsa in modo che la sua attivazione sia stabile. | |
| PY-06 : RALLENTAMENTO | mm | 50.0 | 0 - 99999.9 | Spazio necessario all'asse per rallentare la velocità. | |
| PY-07 : INERZIA AVANTI | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Avanti”, prima della fine del posizionamento. | |
| PY-08 : INERZIA INDIETRO | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Indietro”, prima della fine del posizionamento. | |
| PY-09 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
|
| PY-10 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo di attesa che l'asse si sia fermato, per attivare il controllo dello spazio di tolleranza. | |
| PY-11 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
|
| PY-12 : OLTREQUOTA | mm | 0 | 0 - 9999.9 | Oltrequota per il recupero giochi. | Spazio considerato con PY-11 = 1-2-3-4. Con PY-11 = 0 tale spazio non viene considerato. |
| PY-13 : VELOCITA' MASSIMA | - | 0 | 0 - 99999 | Massima velocità dell'asse con comando analogico 10 Volt. | |
| PY-14 : VELOCITA' MINIMA | - | 0 | 0 - 99999 | Minima velocità dell'asse quando i potenziometri sono sotto la soglia minima (vedi parametro PG-18). | |
| PY-15 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Massima velocità in automatico % sui 10 Volt di comando. | |
| PY-16 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Minima velocità in automatico % sui 10 Volt di comando. | |
| PY-17 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Jog rapido. | % della Velocità massima PY-13 |
| PY-18 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Jog lento. | |
| PY-19 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Prima velocità Homing. | |
| PY-20 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità Homing nel momento del caricamento del conteggio. | |
| PY-21 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
|
| PY-22 : OFFSET HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione alla quale viene comandato l'asse, dopo aver fatto l'Homing. | |
| PY-23 : TIPO HOMING | - | 0 | 0 - 3 | 0: Carica la posizione scritta sul parametro PY-22 quando il sensore viene rilasciato 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PY-22 sul segnale di zero encoder 2: (Homing con il Jog) Con l'ingresso I60 = ON (Camma di zero Asse Y), viene caricato il valore PY-22 sul conteggio. 3: Homing disabilitato. |
|
| PY-24 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0: asse direzione + 1: asse direzione - |
|
| PY-25 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota massima. | |
| PY-26 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota minima. | |
| PY-27 : MINIMO SPOSTAMENTO | mm | 1 | 0 - 999.9 | Spazio di controllo del feedback dell'encoder dopo il tempo PY-28 | Questi parametri, servono per determinare se l'encoder lavora bene e se il cavo di collegamento è integro |
| PY-28 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Tempo nel quale l'asse deve compiere lo spazio PY-27. | |
| PY-29 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
|
| PY-30 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa attivazione del freno, dopo che il comando di movimento asse è OFF. | |
| PY-31 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. | |
| PY-32 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. | |
| Modalità posizionamento ad impulsi |
|||||
| PY-33 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
|
| PY-34 : QUOTA DI AVVICINAMENTO | mm | 0.30 | 0 - 9999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. | |
| PY-35 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. | |
| PY-36 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. | |
| PY-37 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. | |
| PY-38 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. | |
| Varie |
|||||
| PY-39 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
|
| PY-40 : TIPO RALLENTAMENTO | - | 0 | 0 - 2 | Calcolo del rallentamento: 0: fisso con parametro PY-06 1: proporzionale alla velocità rilevata 2: proporzionale al quadrato della velocità rilevata |
|
| PY-41 : RALLENTAMENTO MASSIMO | mm | 0 | 0 - 9999.9 | Massimo rallentamento alla massima velocità PY-13. | Sono considerati solo quanto PY-40 è impostato a 1 o 2 (rallentamento calcolato dallo strumento) |
| PY-42 : RALLENTAMENTO MINIMO | mm | 0 | 0 - 9999.9 | Minimo rallentamento che può essere utilizzato. | |
| PY-43 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo tra la disattivazione di un'uscita di movimento in una direzione e l'attivazione di un'uscita di movimento nella direzione opposta. | |
| PY-44 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica +/-10Vdc 1: uscita analogica 0-10Vdc |
|
| PY-45 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
|
4.4 Setup asse Z
| Z SETUP  | | Per confermare |
| Parametro | U.M. | Default | Range | Descrizione | |
|---|---|---|---|---|---|
| PZ-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PZ-02. | |
| PZ-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PZ-01. PZ-01/PZ-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
|
| PZ-03 : TOLLERANZA | mm | 0.50 | 0 - 999.99 | Spazio entro il quale il posizionamento è considerato corretto. | |
| PZ-04 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di ritardo tra il comando direzione oraria/antioraria e il comando dell'uscita analogica, necessario solo quando si comanda l'inverter con segnale 0-10 Volt (PZ-44 = 1). | |
| PZ-05 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo che si attiva nel momento dell'attivazione del finecorsa (I56 o I57) al termine del quale l'uscita analogica viene portata a 0 Volt. Necessario affinché l'asse superi il finecorsa in modo che la sua attivazione sia stabile. | |
| PZ-06 : RALLENTAMENTO | mm | 50.0 | 0 - 99999.9 | Spazio necessario all'asse per rallentare la velocità. | |
| PZ-07 : INERZIA AVANTI | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Avanti”, prima della fine del posizionamento. | |
| PZ-08 : INERZIA INDIETRO | mm | 0 | 0 - 999.99 | Spazio nel quale viene tolto il comando di movimento “Indietro”, prima della fine del posizionamento. | |
| PZ-09 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
|
| PZ-10 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo di attesa che l'asse si sia fermato, per attivare il controllo dello spazio di tolleranza. | |
| PZ-11 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
|
| PZ-12 : OLTREQUOTA | mm | 0 | 0 - 9999.9 | Oltrequota per il recupero giochi. | Spazio considerato con PZ-11 = 1-2-3-4. Con PZ-11 = 0 tale spazio non viene considerato. |
| PZ-13 : VELOCITA' MASSIMA | - | 0 | 0 - 99999 | Massima velocità dell'asse con comando analogico 10 Volt. | |
| PZ-14 : VELOCITA' MINIMA | - | 0 | 0 - 99999 | Minima velocità dell'asse quando i potenziometri sono sotto la soglia minima (vedi parametro PG-18). | |
| PZ-15 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Massima velocità in automatico % sui 10 Volt di comando. | |
| PZ-16 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Minima velocità in automatico % sui 10 Volt di comando. | |
| PZ-17 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Jog rapido. | % della Velocità massima PZ-13 |
| PZ-18 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Jog lento. | |
| PZ-19 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Prima velocità Homing. | |
| PZ-20 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità Homing nel momento del caricamento del conteggio. | |
| PZ-21 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
|
| PZ-22 : OFFSET HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione alla quale viene comandato l'asse, dopo aver fatto l'Homing. | |
| PZ-23 : TIPO HOMING | - | 0 | 0 - 3 | 0: Carica la posizione scritta sul parametro PZ-22 quando il sensore viene rilasciato 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PZ-22 sul segnale di zero encoder 2: (Homing con il Jog) Con l'ingresso I61 = ON (Camma di zero Asse Z), viene caricato il valore PZ-22 sul conteggio. 3: Homing disabilitato. |
|
| PZ-24 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0: asse direzione + 1: asse direzione - |
|
| PZ-25 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota massima. | |
| PZ-26 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Finecorsa software, quota minima. | |
| PZ-27 : MINIMO SPOSTAMENTO | mm | 1 | 0 - 999.9 | Spazio di controllo del feedback dell'encoder dopo il tempo PZ-28. | Questi parametri, servono per determinare se l'encoder lavora bene e se il cavo di collegamento è integro |
| PZ-28 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Tempo nel quale l'asse deve compiere lo spazio PZ-27. | |
| PZ-29 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
|
| PZ-30 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa attivazione del freno, dopo che il comando di movimento asse è OFF. | |
| PZ-31 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. | |
| PZ-32 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. | |
| Modalità posizionamento ad impulsi |
|||||
| PZ-33 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
|
| PZ-34 : QUOTA DI AVVICINAMENTO | mm | 0.30 | 0 - 9999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. | |
| PZ-35 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. | |
| PZ-36 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. | |
| PZ-37 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. | |
| PZ-38 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. | |
| Varie |
|||||
| PZ-39 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
|
| PZ-40 : TIPO RALLENTAMENTO | - | 0 | 0 - 2 | Calcolo del rallentamento: 0: fisso con parametro PZ-06 1: proporzionale alla velocità rilevata 2: proporzionale al quadrato della velocità rilevata |
|
| PZ-41 : RALLENTAMENTO MASSIMO | mm | 0 | 0 - 9999.9 | Massimo rallentamento alla massima velocità PZ-13. | Sono considerati solo quanto PZ-40 è impostato a 1 o 2 (rallentamento calcolato dallo strumento) |
| PZ-42 : RALLENTAMENTO MINIMO | mm | 0 | 0 - 9999.9 | Minimo rallentamento che può essere utilizzato. | |
| PZ-43 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo tra la disattivazione di un'uscita di movimento in una direzione e l'attivazione di un'uscita di movimento nella direzione opposta. | |
| PZ-44 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica +/-10Vdc 1: uscita analogica 0-10Vdc |
|
| PZ-45 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
|
4.5 Setup asse W
 |  | Per confermare |
| Parametri | U.M. | Default | Range | Descrizione | ||||
|---|---|---|---|---|---|---|---|---|
| PW-01 : ABILITAZIONE ASSE | - | 0 | 0 - 1 | 0: asse disabilitato 1: asse abilitato |
||||
| PW-02 : MEASURE | ° | 0.01 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PW-03. | ||||
| PW-03 : PULSE | - | 1 | 0 - 9999999 | Impulsi encoder per muovere l'asse della distanza impostata in PW-02. PW-02/PW-03 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
||||
| PW-04 : TOLLERANZA | ° | 0.050 | 0 - 99.999 | Spazio entro il quale il posizionamento è considerato corretto. | ||||
| PW-05 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di ritardo tra il comando direzione oraria/antioraria e il comando dell'uscita analogica, necessario solo quando si comanda l'inverter con segnale 0-10 Volt (PW-53 = 1). | ||||
| PW-06 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo che si attiva al momento dell'attivazione dello STOP (I11) al termine del quale l'uscita analogica viene portata a 0 Volt. | ||||
| PW-07 : RALLENTAMENTO | ° | 5.00 | 0 - 9999.99 | Spazio necessario all'asse per rallentare la velocità. | ||||
| PW-08 : INERZIA AVANTI | ° | 0 | 0 - 99.999 | Spazio nel quale viene tolto il comando di movimento “Avanti”, prima della fine del posizionamento. | ||||
| PW-09 : INERZIA INDIETRO | ° | 0 | 0 - 99.999 | Spazio nel quale viene tolto il comando di movimento “Indietro”, prima della fine del posizionamento. | ||||
| PW-10 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
||||
| PW-11 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo di attesa che l'asse si sia fermato, per attivare il controllo dello spazio di tolleranza. | ||||
| PW-12 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
||||
| PW-13 : OLTREQUOTA | ° | 0 | 0 - 999.99 | Oltrequota per il recupero giochi. | Spazio considerato con PW-12 = 1-2-3-4. Con PW-12 = 0 tale spazio non viene considerato. |
|||
| PW-14 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Massima velocità in automatico % sui 10 Volt di comando. | ||||
| PW-15 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Minima velocità in automatico % sui 10 Volt di comando. | ||||
| PW-16 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Jog rapido. | % della Velocità rapida in automatico PW-14 | |||
| PW-17 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Jog lento. | ||||
| PW-18 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Prima velocità Homing. | ||||
| PW-19 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità Homing nel momento del caricamento del conteggio. | ||||
| PW-20 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
||||
| PW-21 : OFFSET HOMING | ° | 0 | -9999.99 - 9999.99 | Posizione alla quale viene comandato l'asse, dopo aver fatto l'Homing. | ||||
| PW-22 : TIPO HOMING | - | 0 | 0 - 3 | 0: Carica la posizione scritta sul parametro PW-21 quando il sensore viene rilasciato 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PW-21 sul segnale di zero encoder 2: (Homing con il Jog) Con l'ingresso I62 = ON (Camma di zero Asse W), viene caricato il valore PW-21 sul conteggio. 3: Homing disabilitato. |
||||
| PW-23 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0: asse direzione + 1: asse direzione - |
||||
| PW-24 : MASSIMA POSIZIONE | ° | 9999.99 | -9999.99 - 9999.99 | Finecorsa software, quota massima. | ||||
| PW-25 : MINIMA POSIZIONE | ° | -9999.99 | -9999.99 - 9999.99 | Finecorsa software, quota minima. | ||||
| PW-26 : MINIMO SPOSTAMENTO | ° | 0.10 | 0 - 99.99 | Spazio di controllo del feedback dell'encoder dopo il tempo PW-27. | Questi parametri, servono per determinare se l'encoder lavora bene e se il cavo di collegamento è integro | |||
| PW-27 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Tempo nel quale l'asse deve compiere lo spazio PW-26. | ||||
| PW-28 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
||||
| PW-29 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa attivazione del freno, dopo che il comando di movimento asse è OFF. | ||||
| PW-30 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. | ||||
| PW-31 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. | ||||
| Modalità posizionamento ad impulsi |
||||||||
| PW-32 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
||||
| PW-33 : QUOTA DI AVVICINAMENTO | ° | 0.30 | 0 - 999.99 | Spazio prima della quota target dove inizia il ciclo ad impulsi. | ||||
| PW-34 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. | ||||
| PW-35 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. | ||||
| PW-36 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. | ||||
| PW-37 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. | ||||
| Linearizzazione |
||||||||
| PW-38 : ABILITA CONVERSIONE | - | 0 | 0 - 1 | 0: conversione lineare della posizione disabilitata 1: conversione lineare della posizione abilitata |
||||
| PW-39 : POSIZIONE REALE 2 | ° | 45.00 | 0 - 9999.99 | Posizione asse | Settore | 2 | Conteggio encoder | |
| PW-40 : POSIZIONE CONVERTITA 2 | ° | 45.00 | 0 - 9999.99 | Conteggio corretto | ||||
| PW-41 : POSIZIONE REALE 3 | ° | 90.00 | 0 - 9999.99 | 3 | ✔ | |||
| PW-42 : POSIZIONE CONVERTITA 3 | ° | 90.00 | 0 - 9999.99 | ✔ | ||||
| PW-43 : POSIZIONE REALE 4 | ° | 135.00 | 0 - 9999.99 | 4 | ✔ | |||
| PW-44 : POSIZIONE CONVERTITA 4 | ° | 135.00 | 0 - 9999.99 | ✔ | ||||
| PW-45 : POSIZIONE REALE 5 | ° | 180.00 | 0 - 9999.99 | 5 | ✔ | |||
| PW-46 : POSIZIONE CONVERTITA 5 | ° | 180.00 | 0 - 9999.99 | ✔ | ||||
| PW-47 : POSIZIONE REALE 6 | ° | 225.00 | 0 - 9999.99 | 6 | ✔ | |||
| PW-48 : POSIZIONE CONVERTITA 6 | ° | 225.00 | 0 - 9999.99 | ✔ | ||||
| PW-49 : POSIZIONE REALE 7 | ° | 270.00 | 0 - 9999.99 | 7 | ✔ | |||
| PW-50 : POSIZIONE CONVERTITA 7 | ° | 270.00 | 0 - 9999.99 | ✔ | ||||
| PW-51 : POSIZIONE REALE 8 | ° | 315.00 | 0 - 9999.99 | 8 | ✔ | |||
| PW-52 : POSIZIONE CONVERTITA 8 | ° | 315.00 | 0 - 9999.99 | ✔ | ||||
| PW-53 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica +/-10Vdc 1: uscita analogica 0-10Vdc |
||||
| PW-54 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
||||
| PW-55 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
||||
4.6 Setup asse H
 | | Per confermare |
| Parametri | U.M. | Default | Range | Descrizione | ||||
|---|---|---|---|---|---|---|---|---|
| PH-01 : MODO INCLINAZIONE | - | 0 | 0 - 1 | 0: si inclina tutta la trave 1: si inclina solo la testa |
||||
| PH-02 : ABILITAZIONE ASSE | - | 0 | 0 - 2 | 0: asse disabilitato 1: asse con solo encoder 2: asse con encoder e motore |
||||
| PH-03 : MEASURE | ° | 0.01 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PH-04. | ||||
| PH-04 : PULSE | - | 1 | 0 - 9999999 | Impulsi encoder per muovere l'asse della distanza impostata in PH-03. PH-03/PH-04 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
||||
| PH-05 : TOLLERANZA | ° | 0.050 | 0 - 99.999 | Spazio entro il quale il posizionamento è considerato corretto. | ||||
| PH-06 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di ritardo tra il comando direzione oraria/antioraria e il comando dell'uscita analogica, necessario solo quando si comanda l'inverter con segnale 0-10 Volt (PH-54 = 1). | ||||
| PH-07 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo che si attiva l momento dell'attivazione del finecorsa (I68 o I69) al termine del quale l'uscita analogica viene portata a 0 Volt. Necessario affinché l'asse superi il finecorsa in modo che la sua attivazione sia stabile. | ||||
| PH-08 : RALLENTAMENTO | ° | 5.00 | 0 - 9999.99 | Spazio necessario all'asse per rallentare la velocità. | ||||
| PH-09 : INERZIA AVANTI | ° | 0 | 0 - 99.999 | Spazio nel quale viene tolto il comando di movimento “Avanti”, prima della fine del posizionamento. | ||||
| PH-10 : INERZIA INDIETRO | ° | 0 | 0 - 99.999 | Spazio nel quale viene tolto il comando di movimento “Indietro”, prima della fine del posizionamento. | ||||
| PH-11 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
||||
| PH-12 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo di attesa che l'asse si sia fermato, per attivare il controllo dello spazio di tolleranza. | ||||
| PH-13 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
||||
| PH-14 : OLTREQUOTA | ° | 0 | 0 - 999.99 | Oltrequota per il recupero giochi. | Spazio considerato con PH-13 = 1-2-3-4. Con PH-13 = 0 tale spazio non viene considerato. |
|||
| PH-15 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Massima velocità in automatico % sui 10 Volt di comando. | ||||
| PH-16 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Minima velocità in automatico % sui 10 Volt di comando. | ||||
| PH-17 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Jog rapido. | % della Velocità rapida in autoamtico PH-15 | |||
| PH-18 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Jog lento. | ||||
| PH-19 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Prima velocità Homing. | ||||
| PH-20 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità Homing nel momento del caricamento del conteggio. | ||||
| PH-21 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
||||
| PH-22 : OFFSET HOMING | ° | 0 | -9999.99 - 9999.99 | Posizione alla quale viene comandato l'asse, dopo aver fatto l'Homing. | ||||
| PH-23 : TIPO HOMING | - | 0 | 0 - 3 | 0: Carica la posizione scritta sul parametro PH-22 quando il sensore viene rilasciato 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PH-22 sul segnale di zero encoder 2: (Homing con il Jog) Con l'ingresso I67 = ON (Camma di zero Asse H), viene caricato il valore PH-22 sul conteggio. 3: Homing disabilitato. |
||||
| PH-24 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0: asse direzione + 1: asse direzione - |
||||
| PH-25 : MASSIMA POSIZIONE | ° | 9999.99 | -9999.99 - 9999.99 | Finecorsa software, quota massima. | ||||
| PH-26 : MINIMA POSIZIONE | ° | -9999.99 | -9999.99 - 9999.99 | Finecorsa software, quota minima. | ||||
| PH-27 : MINIMO SPOSTAMENTO | ° | 0.10 | 0 - 99.99 | Spazio di controllo del feedback dell'encoder dopo il tempo PH-28. | Questi parametri, servono per determinare se l'encoder lavora bene e se il cavo di collegamento è integro | |||
| PH-28 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Tempo nel quale l'asse deve compiere lo spazio PH-27. | ||||
| PH-29 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
||||
| PH-30 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa attivazione del freno, dopo che il comando di movimento asse è OFF. | ||||
| PH-31 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. | ||||
| PH-32 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. | ||||
| Modalità posizionamento ad impulsi |
||||||||
| PH-33 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
||||
| PH-34 : QUOTA DI AVVICINAMENTO | ° | 0.30 | 0 - 999.99 | Spazio prima della quota target dove inizia il ciclo ad impulsi. | ||||
| PH-35 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. | ||||
| PH-36 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. | ||||
| PH-37 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. | ||||
| PH-38 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. | ||||
| Linearizzazione |
||||||||
| PH-39 : ABILITA CONVERSIONE | - | 0 | 0 - 1 | 0: conversione lineare della posizione disabilitata 1: conversione lineare della posizione abilitata |
||||
| PH-40 : POSIZIONE REALE 2 | ° | 22.50 | 0 - 9999.99 | Posizione asse | Settore | 2 | Conteggio encoder | |
| PH-41 : POSIZIONE CONVERTITA 2 | ° | 22.50 | 0 - 9999.99 | Conteggio corretto | ||||
| PH-42 : POSIZIONE REALE 3 | ° | 45.00 | 0 - 9999.99 | 3 | ✔ | |||
| PH-43 : POSIZIONE CONVERTITA 3 | ° | 45.00 | 0 - 9999.99 | ✔ | ||||
| PH-44 : POSIZIONE REALE 4 | ° | 67.50 | 0 - 9999.99 | 4 | ✔ | |||
| PH-45 : POSIZIONE CONVERTITA 4 | ° | 67.50 | 0 - 9999.99 | ✔ | ||||
| PH-46 : POSIZIONE REALE 5 | ° | 90.00 | 0 - 9999.99 | 5 | ✔ | |||
| PH-47 : POSIZIONE CONVERTITA 5 | ° | 90.00 | 0 - 9999.99 | ✔ | ||||
| PH-48 : POSIZIONE REALE 6 | ° | 0.00 | 0 - 9999.99 | 6 | ✔ | |||
| PH-49 : POSIZIONE CONVERTITA 6 | ° | 0.00 | 0 - 9999.99 | ✔ | ||||
| PH-50 : POSIZIONE REALE 7 | ° | 0.00 | 0 - 9999.99 | 7 | ✔ | |||
| PH-51 : POSIZIONE CONVERTITA 7 | ° | 0.00 | 0 - 9999.99 | ✔ | ||||
| PH-52 : POSIZIONE REALE 8 | ° | 0.00 | 0 - 9999.99 | 8 | ✔ | |||
| PH-53 : POSIZIONE CONVERTITA 8 | ° | 0.00 | 0 - 9999.99 | ✔ | ||||
| PH-54 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica +/-10Vdc 1: uscita analogica 0-10Vdc |
||||
| PH-55 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
||||
| PH-56 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
||||
5. Diagnostica
| F6 | |
||||
| | |
||||
| PASSWORD:462 | |
||||
 | I/O |  |
|||
INGRESSI  | USCITE  |
||||
CONTEGGI  | USCITE ANALOGICHE  |
||||
INGRESSI ANALOGICI  | CANBUS  |
||||
5.1 CPU DATA
 | Fw name : codice firmware e relativo checksum Task time : tempo medio del ciclo CPU Maximum Time e Minimum Time limiti registrati CPU time : tempo totale della CPU nello stato di RUN (hh:mm) |
5.2 Ingressi digitali
| INGRESSI  | | Stato degli ingressi digitali |
| Pagina precedente | |
| Pagina successiva |
5.3 Uscite digitali
| USCITE | | Stato delle uscite digitali |
| Pagina precedente | |
| Pagina successiva | |
 | Premere per passare alla modalità di forzatura uscite Premere sull'uscita che si intende attivare. |
5.4 Conteggi encoder
| CONTEGGI | | Posizione assi  Stato dei canali encoder |
|
5.5 Uscite analogiche
| USCITE AN. | | Voltaggio uscite analogiche |
5.6 Ingressi analogici
| INGRESSI AN. | | Lettura ingressi analogici |
5.7 Canbus
| CANBUS | | Stato della comunicazione con il modulo remoto. |
6. Calibrazione assi
| F6 | |
|||
| | |
|||
| PASSWORD:462 | |
|||
 |
||||
 |
||||
| RISOLUZIONE |  |
|||
| LINEARIZZAZIONE |  |
|||
6.1 Risoluzione
 →
→ 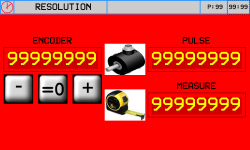
-
Premere il tasto
 (Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti
(Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti -
Premere il tasto
 (Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca
(Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca -
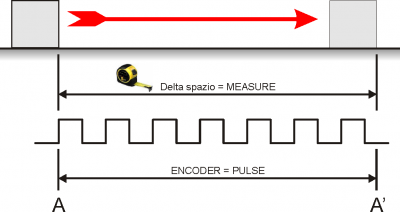
A - A' = Spazio più lungo possibile
-
Segnare la posizione di partenza (A)
-
Azzerare il valore ENCODER:

-
Eseguire il movimento da A ad A'
-
Trascrivere nel campo PULSE, il valore visualizzato nel campo ENCODER
-
Misurare il delta spazio A - A'
-
Scrivere il valore di delta spazio A - A' nel campo MEASURE
Importante:
-
Il valore di PULSE dovrà sempre essere superiore al valore di MEASURE (il valore ottimale è “MEASURE x 10 = PULSE”)
-
Introdurre il valore MEASURE nell'unità di misura scelta. Esempio: se l'unità di misura scelta è 1/10mm e la misura di delta spazio è 133.5mm, introdurre il valore 1335 nel campo MEASURE
-
I valori di Pulse e Misure qui inseriti , verranno trascritti automaticamente nei parametri GP-XX
6.2 Modalità di comando degli inverter
6.2.1 Esempio di un comando avanti
 | 1 | Uscita Avanti |
| 2 | Uscita Rallentamento | |
| 3 | Inerzia | |
| 4 | Tolleranza | |
| 5 | Segnale analogico di comando | |
| 6 | Movimento del motore | |
| 7 | Segnale analogico di comando con impulsi | |
| 8 | Movimento del motore con gli impulsi |
6.2.1.1 Descrizione del grafico
Un asse posizionatore, con motore comandato da inverter, viene gestito con i seguenti comandi digitali di tipo ON/OFF:
Esempio:
-
AON allo Start ⇒ l'uscita Avanti = ON
-
RON = SET - spazio di Rallentamento ⇒ l'uscita Rallentamento = ON
-
AOFF = SET - spazio di Inerzia ⇒ l'uscita Avanti = OFF
Quando l'uscita di movimento Avanti = OFF, a causa del suo peso, l'asse proseguirà il movimento, percorrendo lo spazio di Inerzia, ovvero dal punto ION al SET 1).
Nel momento RON, l'uscita analogica assume un valore inferiore V-.
In altre parole: per ottenere un posizionamento corretto, è necessario che l'asse riesca a decelerare e scaricare tutta la sua energia cinetica, prima di arrivare nel punto ION…..
-
se ciò avviene
-
se il peso dell'asse non varia e non fa oscillare l'asse
-
se le guide di scorrimento non variano il loro attrito
….l'asse si posizionerà correttamente al SET.
Gli assi X-Y-Z-H hanno un peso costante, conseguentemente il loro spazio di Inerzia è allora normalmente “costante”.
Per l'asse W invece, a causa del diverso peso dei blocchi di pietra che gli vengono messi sopra, lo spazio di Inerzia può risultare variabile, soprattutto se il rapporto di riduzione tra motore e meccanica non fosse molto elevato.
Per rimediare ad un rapporto di riduzione non idoneo, non sarà più sufficiente comandare l'asse con i normali comandi Rallentamento e Inerzia, sarà invece necessario utilizzare la Tecnica ad Impulsi.
6.2.1.2 Come funziona la Tecnica ad Impulsi?
Dopo aver comandato all'asse di rallentare la sua velocità, dal punto RI, il comando dell'asse viene fatto utilizzando dei piccoli impulsi di tensione, programmando i seguenti parametri:
-
ABILITAZIONE IMPULSI PW-32 = 1
-
QUOTA DI AVVICINAMENTO PW-33 = xxxxx
-
DURATA IMPULSO PW-34 = xxxxx
-
INTERVALLO IMPULSI PW-35 = xxxxx
-
NUMERO IMPULSI PW-36 = xxxxx
-
AMPIEZZA IMPULSO PW-37 = xxxxx
Lo strumento, dopo ogni impulso, controlla che il conteggio sia arrivato al SET programmato.
Quando il conteggio è arrivato al valore di SET, gli impulsi cessano.
In questo modo, la regolazione si trasformerà….
-
da “anello aperto”
-
ad una specie di “anello chiuso”
….come normalmente viene fatto per comandare:
-
gli inverter vettoriali ad anello chiuso con feedback da encoder
-
oppure Driver di tipo Brusless
6.2.1.3 Taratura
La taratura è abbastanza semplice. Richiede solo del tempo per ripetere più volte i test per capire se il sistema è stabile:
-
tarare la sensibiltà del comando analogico dell'ingresso degli inverter, la più bassa possibile, verificando però, che non diventi sensibile ai disturbi elettromagnetici
-
programmare inizialmente il valore di tensione dell'impulso o AMPIEZZA IMPULSO PW-37 = 0
-
programmare lo spazio di RALLENTAMENTO PW-07 con un valore alto
-
avviare un posizionamento, l'asse si fermerà enne spazio prima di arrivare al SET
-
a questo punto:
-
programmare il valore di INTERVALLO IMPULSI PW-35 ad un valore alto, esempio 2 secondi
-
programmare il valore di tensione AMPIEZZA IMPULSO PW-37 e di DURATA IMPULSO PW-34, minori possibili ma sufficienti a muovere l'asse 1)
-
programmare il NUMERO DI IMPULSI PW-36 ad un valore alto, esempio 999
rifare il posizionamento, succederà allora che l'asse dopo aver rallentato, ogni due secondi farà un “piccolo” avanzamentoa questo punto:-
gradualmente, diminuire il valore di INTERVALLO IMPULSI PW-35 finché l'asse si muoverà in modo continuo
-
poi, gradualmente e contestualmente, diminuire a poco a poco lo spazio di RALLENTAMENTO PW-07 2)
Gradualmente si potrà quindi ottenere, che l'asse, nella fase finale di posizionamento, rallenti in uno spazio breve e poi concluda il posizionamento in modo armonioso, perfettamente al SET programmato, sia con un blocco di pietra, sia senza 3).
1) Trovati i valori minimi con i quali l'asse si muove, settarli con un 10% in più.2) Ripetere il posizionamento ogni volta che vengono variati i valori di questi parametri. A questo punto, collocare un peso sopra il banco.
Quindi, se il posizionamento non avvenisse in modo corretto, ritoccare i valori programmati.3) Il posizionamento verrà considerato corretto solo dopo che il conteggio dell'asse è arrivato al SET entro lo spazio di Tolleranza.6.3 Linearizzazione assi W e H
6.3.1 Operazioni preliminari

oppure
I/O


CONTEGGI


Rilevare e scrivere le posizioni angolari visualizzate (POSIZIONE MACCHINA) alle posizioni fisiche reali (ENCODER) di: 45° 90° 135° 180° 225° 270° 315° 360° Asse W Asse H 6.3.2 Procedura di linearizzazione
-
Abilitare la linearizzazione con il parametro di setup PW-38 o PH-39
|
LINEARIZZAZIONE
 |
|  |
|
-
Abilitare la linearizzazione su ABILITA = 1
-
Inserire nella tabella di linearizzazione, la posizione letta dal trasduttore (colonna ANGOLO REALE) e la posizione letta dalla misura reale (colonna LINEARIZZATO) * Inserire nella colonna ENCODER gli angoli fisici rispettivamente di 45°, 90°, 135°, 180°, 225°, 270° e 360°
-
Inserire nella colonna POSIZIONE MACCHINA le posizioni angolari rilevate
6.4 Recupero dei giochi meccanici
Attivando il Recupero del gioco. è possibile ottenere dei posizionamenti con precisioni più elevate.
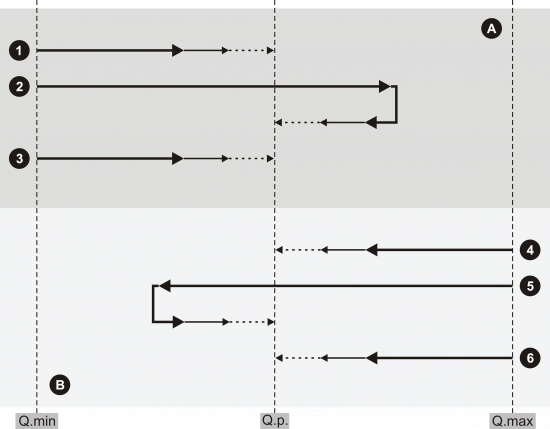
A Posizionamento Avanti 1 Senza recupero giochi PX-11, PY-11, PZ-11, PW-12, PH-13 0 2 Recupero giochi indietro 2 3 Recupero giochi avanti 1 B Indietro 4 Senza recupero giochi PX-11, PY-11, PZ-11, PW-12, PH-13 0 5 Recupero giochi avanti 1 6 Recupero giochi indietro 2 Q.min Quota Minima PX-26, PY-26, PZ-26, PW-25, PH-26 Q.p. Posizionamento Q.max Massima PX-25, PY-25, PZ-25, PW-24, PH-25 
Tratto percorso alla velocità di lavoro 
alla velocità lenta 
per inerzia 6.5 Conclusione della messa in funzione
Eseguire le seguenti procedure:
6.5.1 Backup strumento
6.5.2 Backup su PC
Salvare i dati su PC e conservare in un luogo sicuro.
7. Tabella RPM disco
MAIN MENU





password 462

8. Assistenza
Per poterti fornire un servizio rapido, al minimo costo, abbiamo bisogno del tuo aiuto.


Segui tutte le istruzioni fornite nel manuale MIMAT Se il problema persiste, compila il “Modulo richiesta assistenza” nella pagina Contatti del sito www.qem.it.
I nostri tecnici otterranno gli elementi essenziali per comprendere il tuo problema.Riparazione
Per poterVi fornire un servizio efficente, Vi preghiamo di leggere e attenerVi alle indicazioni qui riportate
Spedizione
Si consiglia di imballare lo strumento con materiali in grado di assorbire eventuali cadute.



Utilizzare l'imballo originale: deve proteggere lo strumento durante il trasporto. Allega:
1. Una descrizione dell'anomalia;
2. Parte dello schema elettrico in cui è inserito lo strumento
3. Programmazione dello strumento (setup, quote di lavoro, parametri…).Una descrizione approfondita del problema ci consentirà di identificare e risolvere rapidamente il tuo problema.
Un accurato imballaggio eviterà ulteriori inconvenienti. -







- Ultima modifica: 2020/03/16 18:20