DA10AnOopos
D = Device(anpos-camming-camming2)
A = Funzioni di Azione
La funzione DA10AnOopos gestisce l'uscita analogica utilizzata nel caso di un posizionamento di tipo ON/OFF che necessita di riferimento analogico per l'azionamento.
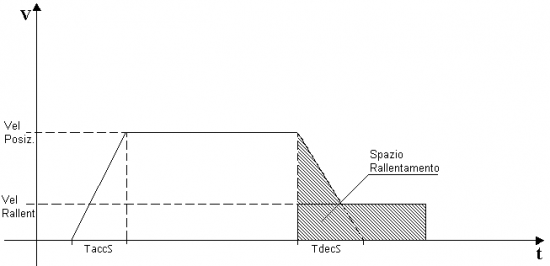
La funzione si incarica della costruzione del profilo di tensione in base alle rampe di accelerazione e decelerazione impostate nella funzione stessa.
Le rampe possono essere di tipo trapezoidale oppure epicicloidale (rampe ad “S”).
Per la precisione del posizionamento è importante che il passaggio da velocità di posizionamento a velocità di rallentamento, avvenga prima della fine dello spazio di rallentamento (impostato nel device OOPOS3)
IMPLEMENTAZIONE
DA10AnOopos(ooAsse,eaDac,aslParam)
Parametri:
| IN/OUT | TIPO VARIABILE | NOME DI ESEMPIO | DIM | |
|---|---|---|---|---|
| IN | OOPOS3 | ooAsse (INTDEVICE) | - | Device ON/OFF che esegue il posizionamento |
| IN | EANPOS | eaDac (INTDEVICE) | - | Device che gestisce il riferimento analogico |
| IN | ARRSYS | aslParam[1] | L | Velocità di posizionamento (‰ della Vel max) |
| IN | ARRSYS | aslParam[2] | L | Velocità in rallentamento (‰ della Vel max) |
| IN | ARRSYS | aslParam[3] | L | Tempo di accelerazione. Tempo necessario all'asse per accelerare da zero alla velocità massima. (sec/100) |
| IN | ARRSYS | aslParam[4] | L | Tempo di decelerazione. Tempo necessario all'asse per decelerare dalla velocità massima a zero. (sec/100) |
| IN | ARRSYS | aslParam[5] | L | Tipo di Rampe utilizzate per il profilo. 0 = Acc e Dec Trapezoidali 1 = Acc e Dec Epicicloidali 2 = Acc Trapezoidale / Dec Epicicloidale 3 = Acc Epicicloidale / Dec Trapezoidale |
| IN | ARRSYS | aslParam[6] | L | Tipo di Uscita analogica 0 = 0 ÷ 10 Volts 1 = -10 ÷ 10 Volts |
Esempio
FILE DI CONFIGURAZIONE
;... ARRSYS aslParam L 6 ;--------------------------------------------- ; INTDEVICE Declaration ;--------------------------------------------- INTDEVICE ooAsse OOPOS3 002 2.CNT01 X 2.INP01 2.OUT01 2.OUT02 X.X X.X 2.OUT03 X.X eaDac1 EANPOS 002 2.CNT01 X X.X 2.AN01
MODULE
;... MAIN: aslParam[1] = 300 ;Vel posiz = 30.0 % aslParam[2] = 50 ;Vel rallentamento = 5.0 % aslParam[3] = 100 ;Tempo Accelerazione = 1 sec aslParam[4] = 150 ;Tempo Decelerazione = 1.5 sec aslParam[5] = 0 ;Tipo di Rampe = Trapezoidali aslParam[6] = 0 ;Tipo Uscita analogica = 0÷10V DA10AnOopos(ooAsse,eaDac,aslParam) WAIT 1 JUMP MAIN
Note
-
Questa funzione deve essere posta in un modulo dell'applicativo che venga sicuramente eseguito ad ogni giro logico
-
Per la precisione del posizionamento è importante che il passaggio da velocità di posizionamento a velocità di rallentamento, avvenga prima della fine dello spazio di rallentamento (impostato nel device OOPOS3). Se questo non avviene è necessario aumentare lo spazio di rallentamento o diminuire il tempo di decelerazione.