P1R11FB30 - 001 : Connessioni e Setup
Informazioni
Release
Il presente documento è valido integralmente salvo errori od omissioni.
| Release | Descrizione | Data |
|---|---|---|
| 1.0 | Manuale preliminare per i collegamenti. | 15/01/13 |
| 1.1 | Inserito il capitolo “Connessioni elettriche” | 11/02/13 |
| 1.2 | Completato il capitolo “Setup” | 21/05/13 |
| 1.3 | Aggiunti nuovi parametri e nuovi I/O | 17/06/13 |
Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
-
Microsoft® e MS-DOS® sono marchi registrati e Windows® è un marchio della Microsoft Corporation.
Descrizione
La applicazione P1R11FB30 - 001, installata nell'hardware Qmove C1-R11-FB30, Qpanel A1-HMI-QC104 e Moduli I/O remoti RMC-2M e RMC-3M, è realizzata per controllare una macchina levigatrice per lastre di marmo a ponte mobile. Di seguito riportiamo le caratteristiche principali del software P1R11FB30 - 001.
Nel resto del documento sarà nostra cura distinguere tra le caratteristiche standard disponibili subito e le caratteristiche sviluppabili in futuro e opzionali.
Caratteristiche implementate nella attuale proposta
-
Controllo di 1 asse analogico (ponte)
-
Controllo fino a 22 teste di levigatura
-
Controllo di un accessorio aggiuntivo (spazzolone)
-
Acquisizione lastra attraverso barra sensori
-
Funzionalità touchscreen per introduzioni dati e azioni tramite bottoni
-
Messaggistica di supporto all'operatore
-
Messaggistica di allarme
Hardware e collegamenti
Scheda base
Alimentatore
Lo strumento dovrà essere alimentato a 24Vdc. Non sarà previsto nessun fusibile interno.
Connettività
-
PORTA PROG → Seriale con standard logico TTL per programmazione.
-
PORTA USER → Seriale multistandard (RS232, RS422, RS485).
-
PORTA AUX RS485 → Seriale multistandard (RS232, RS422, RS485).
-
PORTA ETHERNET → Connettore RJ45
-
PORTA CAN → “bus di campo” tipo Canbus.
Nr. 1 Porta MMC per salvataggio/caricamento dati da memoria esterna.
C1-R11-FB30
 |
| Vista generale del C1-R11FB30 |
 |
| Vista posteriore dello SLOT2 del C1-R11FB30 |
 |
| Vista posteriore dello SLOT3 del C1-R11FB30 - Scheda 1MG3F |
A1-HMI-QC104
 |
| Vista anteriore del A1-HMI-QC104 |
 |
| Vista posteriore del A1-HMI-QC104 |
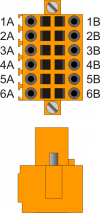
RMC-2M
 |
| Vista generale del RMC-2M |
 |
| Composizione bus del RMC-2M |
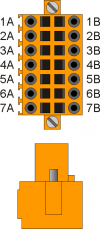
RMC-3M
 |
| Vista generale del RMC-3M |
 |
| Composizione bus del RMC-3M |
Lista I/O
In questo capitolo elenchiamo tutti gli I/O utilizzati e divisi per connettore. Per una descrizione più dettagliata di alcuni degli I/O elencati, vedere nei capitoli successivi dove viene descritto ogni singolo connettore.
Ingressi digitali (n. 128)
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| I1 | Emergenza | CN11 | C1R11-FB30 |
| I2 | Riserva | ||
| I3 | Riserva | ||
| I4 | Riserva | ||
| I5 | Riserva | ||
| I6 | Riserva | ||
| I7 | Riserva | ||
| I8 | Riserva | ||
| I9 | Riserva | CN12 | C1R11-FB30 |
| I10 | Riserva | ||
| I11 | Riserva | ||
| I12 | Riserva | ||
| I13 | Riserva | ||
| I14 | Riserva | ||
| I15 | Riserva | ||
| I16 | Riserva |
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| I17 | Emergenza | CN11 | A1HMI-QC104 |
| I18 | Jog Avanti Ponte | ||
| I19 | Jog Indietro Ponte | ||
| I20 | Pulsante di START | ||
| I21 | Pulsante di STOP | ||
| I22 | Pulsante di cambio abrasivo | ||
| I23 | Selettore MAN / AUTO | ||
| I24 | Ingresso di STAND-BY | ||
| I25 | Riserva | CN12 | A1HMI-QC104 |
| I26 | Riserva | ||
| I27 | Riserva | ||
| I28 | Riserva | ||
| I29 | Riserva | ||
| I30 | Riserva | ||
| I31 | Riserva | ||
| I32 | Riserva |
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| I33 | Termici teste | CN2 SLOT2 (I32) | RMC2M |
| I34 | Fault Ponte | ||
| I35 | Fault Nastro | ||
| I36 | Fault Rulliere | ||
| I37 | Pressione Aria | ||
| I38 | Pressione Acqua | ||
| I39 | FC Avanti Ponte | ||
| I40 | FC Indietro Ponte | ||
| I41 | Sensore di zero Ponte | ||
| I42 | Sensore presenza Lastra su fine Rulliere | ||
| I43 | Sensore presenza Lastra su inizio Nastro | ||
| I44 | Sensore abrasivo consumato | ||
| I45 | Riserva | ||
| I46 | Riserva | ||
| I47 | Riserva | ||
| I48 | Riserva | ||
| I49 | Riserva | CN3 SLOT2 (I32) | RMC2M |
| I50 | Riserva | ||
| I51 | Riserva | ||
| I52 | Riserva | ||
| I53 | Riserva | ||
| I54 | Riserva | ||
| I55 | Riserva | ||
| I56 | Riserva | ||
| I57 | Riserva | ||
| I58 | Riserva | ||
| I59 | Riserva | ||
| I60 | Riserva | ||
| I61 | Riserva | ||
| I62 | Riserva | ||
| I63 | Riserva | ||
| I64 | Riserva |
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| I65 | Sensore Barriera 1 | SLOT3 (I16) | RMC3M |
| I66 | Sensore Barriera 2 | ||
| I67 | Sensore Barriera 3 | ||
| I68 | Sensore Barriera 4 | ||
| I69 | Sensore Barriera 5 | ||
| I70 | Sensore Barriera 6 | ||
| I71 | Sensore Barriera 7 | ||
| I72 | Sensore Barriera 8 | ||
| I73 | Sensore Barriera 9 | ||
| I74 | Sensore Barriera 10 | ||
| I75 | Sensore Barriera 11 | ||
| I76 | Sensore Barriera 12 | ||
| I77 | Sensore Barriera 13 | ||
| I78 | Sensore Barriera 14 | ||
| I79 | Sensore Barriera 15 | ||
| I80 | Sensore Barriera 16 | ||
| I81 | Sensore Barriera 17 | SLOT4 (I16) | RMC3M |
| I82 | Sensore Barriera 18 | ||
| I83 | Sensore Barriera 19 | ||
| I84 | Sensore Barriera 20 | ||
| I85 | Sensore Barriera 21 | ||
| I86 | Sensore Barriera 22 | ||
| I87 | Sensore Barriera 23 | ||
| I88 | Sensore Barriera 24 | ||
| I89 | Sensore Barriera 25 | ||
| I90 | Sensore Barriera 26 | ||
| I91 | Sensore Barriera 27 | ||
| I92 | Sensore Barriera 28 | ||
| I93 | Sensore Barriera 29 | ||
| I94 | Sensore Barriera 30 | ||
| I95 | Sensore Barriera 31 | ||
| I96 | Sensore Barriera 32 | ||
| I97 | Sensore Barriera 33 | SLOT5 (I16) | RMC3M |
| I98 | Sensore Barriera 34 | ||
| I99 | Sensore Barriera 35 | ||
| I100 | Sensore Barriera 36 | ||
| I101 | Sensore Barriera 37 | ||
| I102 | Sensore Barriera 38 | ||
| I103 | Sensore Barriera 39 | ||
| I104 | Sensore Barriera 40 | ||
| I105 | Sensore Barriera 41 | ||
| I106 | Sensore Barriera 42 | ||
| I107 | Sensore Barriera 43 | ||
| I108 | Sensore Barriera 44 | ||
| I109 | Sensore Barriera 45 | ||
| I110 | Sensore Barriera 46 | ||
| I111 | Sensore Barriera 47 | ||
| I112 | Sensore Barriera 48 | ||
| I113 | Sensore Barriera 49 | SLOT6 (I16) | RMC3M |
| I114 | Sensore Barriera 50 | ||
| I115 | Sensore Barriera 51 | ||
| I116 | Sensore Barriera 52 | ||
| I117 | Sensore Barriera 53 | ||
| I118 | Sensore Barriera 54 | ||
| I119 | Sensore Barriera 55 | ||
| I120 | Sensore Barriera 56 | ||
| I121 | Sensore Barriera 57 | ||
| I122 | Sensore Barriera 58 | ||
| I123 | Sensore Barriera 59 | ||
| I124 | Sensore Barriera 60 | ||
| I125 | Sensore Barriera 61 | ||
| I126 | Sensore Barriera 62 | ||
| I127 | Sensore Barriera 63 | ||
| I128 | Sensore Barriera 64 |
Uscite digitali (n. 112)
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| O1 | Stato di allarme | CN15 | C1R11-FB30 |
| O2 | Riserva | ||
| O3 | Riserva | ||
| O4 | Riserva | ||
| O5 | Riserva | ||
| O6 | Riserva | ||
| O7 | Riserva | ||
| O8 | Riserva |
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| O9 | Lampada AUTOMATICO ON | CN15 | A1HMI-QC104 |
| O10 | Lampada ALLARME | ||
| O11 | Lampada PRE-START | ||
| O12 | Lampada RUN | ||
| O13 | Riserva | ||
| O14 | Riserva | ||
| O15 | Riserva | ||
| O16 | Riserva |
| NOME | DESCRIZIONE | MORSETTO | HARDWARE |
|---|---|---|---|
| O17 | Abilitazione Ponte | SLOT4 (P32) | RMC2M |
| O18 | Avanzamento Nastro | ||
| O19 | Avanzamento Rulliere | ||
| O20 | Salita / Discesa Spazzolone | ||
| O21 | Abilitazione Run macchina precedente (opzionale) | ||
| O22 | Lubrificazione (opzionale) | ||
| O23 | Stop Nastro | ||
| O24 | TESTA 1: Avviamento | ||
| O25 | TESTA 1: Salita | ||
| O26 | TESTA 1: Discesa | ||
| O27 | TESTA 2: Avviamento | ||
| O28 | TESTA 2: Salita | ||
| O29 | TESTA 2: Discesa | ||
| O30 | TESTA 3: Avviamento | ||
| O31 | TESTA 3: Salita | ||
| O32 | TESTA 3: Discesa | ||
| O33 | TESTA 4: Avviamento | ||
| O34 | TESTA 4: Salita | ||
| O35 | TESTA 4: Discesa | ||
| O36 | TESTA 5: Avviamento | ||
| O37 | TESTA 5: Salita | ||
| O38 | TESTA 5: Discesa | ||
| O39 | TESTA 6: Avviamento | ||
| O40 | TESTA 6: Salita | ||
| O41 | TESTA 6: Discesa | ||
| O42 | TESTA 7: Avviamento | ||
| O43 | TESTA 7: Salita | ||
| O44 | TESTA 7: Discesa | ||
| O45 | TESTA 8: Avviamento | ||
| O46 | TESTA 8: Salita | ||
| O47 | TESTA 8: Discesa | ||
| O48 | TESTA 9: Avviamento | ||
| O49 | TESTA 9: Salita | SLOT5 (P32) | RMC2M |
| O50 | TESTA 9: Discesa | ||
| O51 | TESTA 10: Avviamento | ||
| O52 | TESTA 10: Salita | ||
| O53 | TESTA 10: Discesa | ||
| O54 | TESTA 11: Avviamento | ||
| O55 | TESTA 11: Salita | ||
| O56 | TESTA 11: Discesa | ||
| O57 | TESTA 12: Avviamento | ||
| O58 | TESTA 12: Salita | ||
| O59 | TESTA 12: Discesa | ||
| O60 | TESTA 13: Avviamento | ||
| O61 | TESTA 13: Salita | ||
| O62 | TESTA 13: Discesa | ||
| O63 | TESTA 14: Avviamento | ||
| O64 | TESTA 14: Salita | ||
| O65 | TESTA 14: Discesa | ||
| O66 | TESTA 15: Avviamento | ||
| O67 | TESTA 15: Salita | ||
| O68 | TESTA 15: Discesa | ||
| O69 | TESTA 16: Avviamento | ||
| O70 | TESTA 16: Salita | ||
| O71 | TESTA 16: Discesa | ||
| O72 | TESTA 17: Avviamento | ||
| O73 | TESTA 17: Salita | ||
| O74 | TESTA 17: Discesa | ||
| O75 | TESTA 18: Avviamento | ||
| O76 | TESTA 18: Salita | ||
| O77 | TESTA 18: Discesa | ||
| O78 | TESTA 19: Avviamento | ||
| O79 | TESTA 19: Salita | ||
| O80 | TESTA 19: Discesa | ||
| O81 | TESTA 20: Avviamento (opzionale) | SLOT6 (P32) opzionale | RMC2M |
| O82 | TESTA 20: Salita (opzionale) | ||
| O83 | TESTA 20: Discesa (opzionale) | ||
| O84 | TESTA 21: Avviamento (opzionale) | ||
| O85 | TESTA 21: Salita (opzionale) | ||
| O86 | TESTA 21: Discesa (opzionale) | ||
| O87 | TESTA 22: Avviamento (opzionale) | ||
| O88 | TESTA 22: Salita (opzionale) | ||
| O89 | TESTA 22: Discesa (opzionale) | ||
| O90 | Riserva | ||
| O91 | Riserva | ||
| O92 | Riserva | ||
| O93 | Riserva | ||
| O94 | Riserva | ||
| O95 | Riserva | ||
| O96 | Riserva | ||
| O97 | Riserva | ||
| O98 | Riserva | ||
| O99 | Riserva | ||
| O100 | Riserva | ||
| O101 | Riserva | ||
| O102 | Riserva | ||
| O103 | Riserva | ||
| O104 | Riserva | ||
| O105 | Riserva | ||
| O106 | Riserva | ||
| O107 | Riserva | ||
| O108 | Riserva | ||
| O109 | Riserva | ||
| O110 | Riserva | ||
| O111 | Riserva | ||
| O112 | Riserva |
Ingressi di conteggio bidirezionali (n° 4)
| Nome | Descrizione | Connettore | Hardware |
|---|---|---|---|
| PHA1 PHB1 | Ponte | CN7 | C1R11-FB30 |
| PHA2 PHB2 | Nastro | CN8 | |
| PHA3 PHB3 | Riserva | CN9 | |
| PHA4 PHB4 | Riserva | CN10 |
Ingressi analogici (n. 4)
| Name | Description | Connector | Hardware |
|---|---|---|---|
| AI1 | Riserva | CN17 | C1R11-FB30 |
| AI2 | Riserva |
| Name | Description | Connector | Hardware |
|---|---|---|---|
| AI3 | Riserva | CN17 | A1HMI-QC104 |
| AI4 | Riserva |
Uscite analogiche (n. 4)
| Nome | Descrizione | Connettore | Hardware |
|---|---|---|---|
| AO1 | Controllo velocità Ponte ±10Vdc | CN16 | C1R11-FB30 |
| AO2 | Riserva | ||
| AO3 | Riserva | ||
| AO4 | Riserva |
Tasti funzione
| Nome | Descrizione | Hardware |
|---|---|---|
| F1 | - | A1HMI-QC104 |
| F2 | - | |
| F3 | - | |
| F4 | - | |
| F5 | Preset Ponte | |
| F6 | Pagina di allarmi, reset allarmi |
Connessioni elettriche
C1-R11-FB30
CN1- Power supply (Ingresso Alimentazione)
| Alimentazioni disponibili | 24 Vdc | 24 Vac |
|---|---|---|
| Range valido | 22 ÷ 27 Vdc | +/-15% |
| Assorbimento max. | 30W | 35VA |
| Frequenza | 50/60Hz |
 | 1 | Fase alimentazione AC / Positivo alimentazione DC |
| 2 | Terra | |
| 3 | Fase alimentazione AC / 0V alimentazione DC |
CN2 - PORTA USER. Seriale RS232-RS422-RS485 (isolata)
Porta seriale utilizzabile per un collegamento MODBUS RTU (RS485) con l'inverter che comanda il mandrino per rilevare il dato di corrente assorbita.
 | 1A | A - Canale A RS485 |
| 2A | B - Canale B RS485 | |
| 3A | 0V - Comune Porta seriale. | |
| 4A | 0V - Comune Porta seriale. | |
| 5A | TX (Trasmissione RS232) | |
| 6A | PE - Terra. | |
| 1B | RX - (Ricezione “positiva” RS422) | |
| 2B | RXN - (Ricezione “negativa” RS422) | |
| 3B | TX - (Trasmissione “positiva” RS422) | |
| 4B | TXN - (Trasmissione “negativa” RS422) | |
| 5B | RX (Ricezione RS232) | |
| 6B | PE - Terra. |
Settaggio standard elettrico USER PORT
| SW2 | Num. Dip | Nome DIP | Impostazione dei DIP | Funzione | ||
|---|---|---|---|---|---|---|
 | 1 | JP2 | ON | X1) | X2) | Terminazione RS485 |
| 2 | JP3 | ON | X3) | X4) | Polarizzazione RS485 | |
| 3 | JP1 | ON | X5) | X6) | ||
| 4 | OFF | ON | OFF | Selezione standard elettrico USER PORT | ||
| 5 | ON | OFF | OFF | |||
| 6 | OFF | OFF | ON | |||
| RS485 | RS422 | RS2327) | ||||
CN5 - PORTA CAN
 | 1 | 0 Volt - Comune Porta seriale |
| 2 | B | |
| 3 | A |
CN7 - 1 conteggio (PP, LD) - ponte
| Connettore | Pin | ID | Descrizione | Indirizzo | ||
|---|---|---|---|---|---|---|
 | 1A | Internal bridge - 1A to 1B | ||||
| 2A | PHA1 | Fase A conteggio 1 | PNP Push-Pull 1) | 3.INP17 | 3.CNT01 | |
| 3A | PHB1 | Fase B conteggio 1 | 3.INP18 | |||
| 4A | Z1 | Z conteggio 1 | 1.INT01 | |||
| 5A | 0V | Comune degli ingressi di conteggio | ||||
| 6A | 0V | |||||
| 7A | 0V | |||||
| 1B | Internal bridge - 1A to 1B | |||||
| 2B | PHA1+ | + PHA conteggio 1 | Line Driver | 3.INP17 | 3.CNT01 | |
| 3B | PHB1+ | + PHB conteggio 1 | 3.INP18 | |||
| 4B | Z1+ | + Z conteggio 1 | 1.INT01 | |||
| 5B | PHAN1 | - PHA conteggio 1 | ||||
| 6B | PHBN1 | - PHB conteggio 1 | ||||
| 7B | ZN1 | - Z conteggio 1 | ||||
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7A
CN8 - 1 conteggio (PP, LD) - nastro
| Connettore | Pin | ID | Descrizione | Indirizzo | ||
|---|---|---|---|---|---|---|
| | 1A | Internal bridge - 1A to 1B | ||||
| 2A | PHA2 | Fase A conteggio 2 | PNP Push-Pull 1) | 3.INP19 | 3.CNT02 | |
| 3A | PHB2 | Fase B conteggio 2 | 3.INP20 | |||
| 4A | Z2 | Z conteggio 2 | 1.INT02 | |||
| 5A | 0V | Comune degli ingressi di conteggio | ||||
| 6A | 0V | |||||
| 7A | 0V | |||||
| 1B | Internal bridge - 1A to 1B | |||||
| 2B | PHA2+ | + PHA conteggio 2 | Line Driver | 3.INP19 | 3.CNT02 | |
| 3B | PHB2+ | + PHB conteggio 2 | 3.INP20 | |||
| 4B | Z2+ | + Z conteggio 2 | 1.INT02 | |||
| 5B | PHAN2 | - PHA conteggio 2 | ||||
| 6B | PHBN2 | - PHB conteggio 2 | ||||
| 7B | ZN2 | - Z conteggio 2 | ||||
Configurazione conteggio di tipo PNP/Push-Pull:
- Morsetto 5B = collegare al morsetto 5A
- Morsetto 6B = collegare al morsetto 6A
- Morsetto 7B = collegare al morsetto 7A
CN11 - 8 ingressi "standard" (logica PNP)
| Connettore | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|
 | 1 | - | Non utilizzato | |
| 2 | - | Non utilizzato | ||
| 3 | 0V | Vout (0 V) - Comune ingressi digitali I1÷I8 | ||
| 4 | I1 | Linea emergenze inserita (NC) | 3.INP01 | |
| 5 | I2 | Riserva | 3.INP02 | |
| 6 | I3 | Riserva | 3.INP03 | |
| 7 | I4 | Riserva | 3.INP04 | |
| 8 | I5 | Riserva | 3.INP05 | |
| 9 | I6 | Riserva | 3.INP06 | |
| 10 | I7 | Riserva | 3.INP07 | |
| 11 | I8 | Riserva | 3.INP08 | |
| 12 | 0V | Vout (0 V) - Comune ingressi digitali I1÷I8 |
CN12 - 8 ingressi "standard" (logica PNP)
Tutti gli ingressi di questi morsetti sono contrassegnati come Riserva
CN15 - 8 uscite digitali statiche (24V - 0,5 A)
| Connettore | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|
 | 1 | V+ | Alimentazione uscite (12÷28 Vdc) | |
| 2 | O1 | Stato di allarme (0 = allarme, 1 = ok) | 3.OUT01 | |
| 3 | O2 | Riserva | 3.OUT02 | |
| 4 | - | n.c. | ||
| 5 | O3 | Riserva | 3.OUT03 | |
| 6 | O4 | Riserva | 3.OUT04 | |
| 7 | 0V | 0V Alimentazione uscite | ||
| 8 | O5 | Riserva | 3.OUT05 | |
| 9 | O6 | Riserva | 3.OUT06 | |
| 10 | O7 | Riserva | 3.OUT07 | |
| 11 | O8 | Riserva | 3.OUT08 |
CN16 - 4 uscite analogiche
| Connettore | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|
 | 1 | GA01 | Comune uscite analogiche A01÷A02 | |
| 2 | AO1 | Controllo velocità ponte 0÷10V | 3.AN01 | |
| 3 | AO2 | Riserva | 3.AN02 | |
| 4 | GA02 | Comune uscite analogiche A03÷A04 | ||
| 5 | AO3 | Riserva | 3.AN03 | |
| 6 | AO4 | Riserva | 3.AN04 |
CN17 - 2 ingressi analogici 12 bit (Potenz, 0-10V, 0-20mA)
Tutti gli ingressi questi morsetti sono contrassegnati come Riserva
A1-HMI-QC104
CN1- Power supply (Ingresso Alimentazione)
| Alimentazioni disponibili | 24 Vdc | 24 Vac |
|---|---|---|
| Range valido | 22 ÷ 27 Vdc | +/-15% |
| Assorbimento max. | 30W | 35VA |
| Frequenza | 50/60Hz |
| | 1 | Fase alimentazione AC / Positivo alimentazione DC |
| 2 | Terra | |
| 3 | Fase alimentazione AC / 0V alimentazione DC |
CN2 - PORTA USER. Seriale RS232-RS422-RS485 (isolata)
Porta seriale utilizzabile per un collegamento MODBUS RTU (RS485) con l'inverter che comanda il mandrino per rilevare il dato di corrente assorbita.
| | 1A | A - Canale A RS485 |
| 2A | B - Canale B RS485 | |
| 3A | 0V - Comune Porta seriale. | |
| 4A | 0V - Comune Porta seriale. | |
| 5A | TX (Trasmissione RS232) | |
| 6A | PE - Terra. | |
| 1B | RX - (Ricezione “positiva” RS422) | |
| 2B | RXN - (Ricezione “negativa” RS422) | |
| 3B | TX - (Trasmissione “positiva” RS422) | |
| 4B | TXN - (Trasmissione “negativa” RS422) | |
| 5B | RX (Ricezione RS232) | |
| 6B | PE - Terra. |
Settaggio standard elettrico USER PORT
CN11 - 8 ingressi "standard" (logica PNP)
| Connettore | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|
| | 1 | - | Non utilizzato | |
| 2 | - | Non utilizzato | ||
| 3 | 0V | Vout (0 V) - Comune ingressi digitali I1÷I8 | ||
| 4 | I1 | Linea emergenze inserita (NC) | 3.INP01 | |
| 5 | I2 | Jog Avanti Ponte (NO) | 3.INP02 | |
| 6 | I3 | Jog Indietro Ponte (NO) | 3.INP03 | |
| 7 | I4 | Pulsante di START (NO) | 3.INP04 | |
| 8 | I5 | Pulsante di STOP (NO) | 3.INP05 | |
| 9 | I6 | Pulsante di cambio abrasivo (NO) | 3.INP06 | |
| 10 | I7 | Selettore MAN / AUTO | 3.INP07 | |
| 11 | I8 | Ingresso di STAND-BY | 3.INP08 | |
| 12 | 0V | Vout (0 V) - Comune ingressi digitali I1÷I8 |
CN12 - 8 ingressi "standard" (logica PNP)
Tutti gli ingressi di questi morsetti sono contrassegnati come Riserva
CN15 - 8 uscite digitali statiche (24V - 0,5 A)
| Connettore | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|
| | 1 | V+ | Alimentazione uscite (12÷28 Vdc) | |
| 2 | O1 | Lampada AUTOMATICO ON | 3.OUT01 | |
| 3 | O2 | Lampada ALLARME | 3.OUT02 | |
| 4 | - | n.c. | ||
| 5 | O3 | Lampada PRE-START | 3.OUT03 | |
| 6 | O4 | Lampada RUN | 3.OUT04 | |
| 7 | 0V | 0V Alimentazione uscite | ||
| 8 | O5 | Riserva | 3.OUT05 | |
| 9 | O6 | Riserva | 3.OUT06 | |
| 10 | O7 | Riserva | 3.OUT07 | |
| 11 | O8 | Riserva | 3.OUT08 |
CN17 - 2 ingressi analogici 12 bit (Potenz, 0-10V, 0-20mA)
Tutti gli ingressi questi morsetti sono contrassegnati come Riserva
RMC-2M
CN1- Power supply (Ingresso Alimentazione - 24 Vdc)
 | 1 | 0V alimentazione DC |
| 2 | Terra | |
| 3 | 24V alimentazione DC |
SLOT 2 (CN2, CN3)
| CN2 | Pin | ID | Descrizione | Indirizzo | CN3 | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|---|---|---|---|---|
 | 1A | +24V | OUT 24Volt | | 1B | +24V | OUT 24Volt | ||
| 2A | 0V | 0V out 24V | 2B | 0V | 0V out 24V | ||||
| 3A | I1 | Termici teste (NC) | 4.INP01 | 3B | I17 | Riserva | 4.INP17 | ||
| 4A | I2 | Fault Ponte (NC) | 4.INP02 | 4B | I18 | 4.INP18 | |||
| 5A | I3 | Fault Nastro (NO) | 4.INP03 | 5B | I19 | 4.INP19 | |||
| 6A | I4 | Fault Rulliere (NO) | 4.INP04 | 6B | I20 | 4.INP20 | |||
| 7A | I5 | Pressione Aria (NC) | 4.INP05 | 7B | I21 | 4.INP21 | |||
| 8A | I6 | Pressione Acqua (NC) | 4.INP06 | 8B | I22 | 4.INP22 | |||
| 9A | I7 | FC Avanti Ponte (NC) | 4.INP07 | 9B | I23 | 4.INP23 | |||
| 10A | I8 | FC Indietro Ponte (NC) | 4.INP08 | 10B | I24 | 4.INP24 | |||
| 11A | +24V | OUT 24Volt | 11B | +24V | OUT 24Volt | ||||
| 12A | 0V | 0V out 24V | 12B | 0V | 0V out 24V | ||||
| 13A | I9 | Sensore di zero Ponte | 4.INP09 | 13B | I25 | Riserva | 4.INP25 | ||
| 14A | I10 | Sensore presenza Lastra su fine Rulliere | 4.INP10 | 14B | I26 | 4.INP26 | |||
| 15A | I11 | Sensore presenza Lastra su inizio Nastro | 4.INP11 | 15B | I27 | 4.INP27 | |||
| 16A | I12 | Sensore abrasivo consumato | 4.INP12 | 16B | I28 | 4.INP28 | |||
| 17A | I13 | Riserva | 4.INP13 | 17B | I29 | 4.INP29 | |||
| 18A | I14 | Riserva | 4.INP14 | 18B | I30 | 4.INP30 | |||
| 19A | I15 | Riserva | 4.INP15 | 19B | I31 | 4.INP31 | |||
| 20A | I16 | Riserva | 4.INP16 | 20B | I32 | 4.INP32 |
CN4 - CN5 - PORTA CAN
| | 1 | 0 Volt - Comune Porta seriale |
| 2 | B | |
| 3 | A |
SLOT 4 (H1-P32)
| A Side | Pin | ID | Descrizione | Indirizzo | B Side | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|---|---|---|---|---|
| | 1A | V+ | Voltage input 12÷28 Vdc | | 1B | V+ | Voltage input 12÷28 Vdc | ||
| 2A | V- | 2B | V- | ||||||
| 3A | O1 | Abilitazione Ponte | 4.OUT01 | 3B | O17 | TESTA 4: Avviamento | 4.OUT17 | ||
| 4A | O2 | Avanzamento Nastro | 4.OUT02 | 4B | O18 | TESTA 4: Salita | 4.OUT18 | ||
| 5A | O3 | Avanzamento Rulliere | 4.OUT03 | 5B | O19 | TESTA 4: Discesa | 4.OUT19 | ||
| 6A | O4 | Salita / Discesa Spazzolone | 4.OUT04 | 6B | O20 | TESTA 5: Avviamento | 4.OUT20 | ||
| 7A | O5 | Run macchina precedente (opzionale) | 4.OUT05 | 7B | O21 | TESTA 5: Salita | 4.OUT21 | ||
| 8A | O6 | Lubrificazione (opzionale) | 4.OUT06 | 8B | O22 | TESTA 5: Discesa | 4.OUT22 | ||
| 9A | O7 | Stop Nastro | 4.OUT07 | 9B | O23 | TESTA 6: Avviamento | 4.OUT23 | ||
| 10A | O8 | TESTA 1: Avviamento | 4.OUT08 | 10B | O24 | TESTA 6: Salita | 4.OUT24 | ||
| 11A | V+ | Voltage input 12÷28 Vdc | 11B | V+ | Voltage input 12÷28 Vdc | ||||
| 12A | V- | 12B | V- | ||||||
| 13A | O9 | TESTA 1: Salita | 4.OUT09 | 13B | O25 | TESTA 6: Discesa | 4.OUT25 | ||
| 14A | O10 | TESTA 1: Discesa | 4.OUT10 | 14B | O26 | TESTA 7: Avviamento | 4.OUT26 | ||
| 15A | O11 | TESTA 2: Avviamento | 4.OUT11 | 15B | O27 | TESTA 7: Salita | 4.OUT27 | ||
| 16A | O12 | TESTA 2: Salita | 4.OUT12 | 16B | O28 | TESTA 7: Discesa | 4.OUT28 | ||
| 17A | O13 | TESTA 2: Discesa | 4.OUT13 | 17B | O29 | TESTA 8: Avviamento | 4.OUT29 | ||
| 18A | O14 | TESTA 3: Avviamento | 4.OUT14 | 18B | O30 | TESTA 8: Salita | 4.OUT30 | ||
| 19A | O15 | TESTA 3: Salita | 4.OUT15 | 19B | O31 | TESTA 8: Discesa | 4.OUT31 | ||
| 20A | O16 | TESTA 3: Discesa | 4.OUT16 | 20B | O32 | TESTA 9: Avviamento | 4.OUT32 |
SLOT 5 (H1-P32)
| A Side | Pin | ID | Descrizione | Indirizzo | B Side | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|---|---|---|---|---|
| | 1A | V+ | Voltage input 12÷28 Vdc | | 1B | V+ | Voltage input 12÷28 Vdc | ||
| 2A | V- | 2B | V- | ||||||
| 3A | O1 | TESTA 9: Salita | 4.OUT33 | 3B | O17 | TESTA 14: Discesa | 4.OUT49 | ||
| 4A | O2 | TESTA 9: Discesa | 4.OUT34 | 4B | O18 | TESTA 15: Avviamento | 4.OUT50 | ||
| 5A | O3 | TESTA 10: Avviamento | 4.OUT35 | 5B | O19 | TESTA 15: Salita | 4.OUT51 | ||
| 6A | O4 | TESTA 10: Salita | 4.OUT36 | 6B | O20 | TESTA 15: Discesa | 4.OUT52 | ||
| 7A | O5 | TESTA 10: Discesa | 4.OUT37 | 7B | O21 | TESTA 16: Avviamento | 4.OUT53 | ||
| 8A | O6 | TESTA 11: Avviamento | 4.OUT38 | 8B | O22 | TESTA 16: Salita | 4.OUT54 | ||
| 9A | O7 | TESTA 11: Salita | 4.OUT39 | 9B | O23 | TESTA 16: Discesa | 4.OUT55 | ||
| 10A | O8 | TESTA 11: Discesa | 4.OUT40 | 10B | O24 | TESTA 17: Avviamento | 4.OUT56 | ||
| 11A | V+ | Voltage input 12÷28 Vdc | 11B | V+ | Voltage input 12÷28 Vdc | ||||
| 12A | V- | 12B | V- | ||||||
| 13A | O9 | TESTA 12: Avviamento | 4.OUT41 | 13B | O25 | TESTA 17: Salita | 4.OUT57 | ||
| 14A | O10 | TESTA 12: Salita | 4.OUT42 | 14B | O26 | TESTA 17: Discesa | 4.OUT58 | ||
| 15A | O11 | TESTA 12: Discesa | 4.OUT43 | 15B | O27 | TESTA 18: Avviamento | 4.OUT59 | ||
| 16A | O12 | TESTA 13: Avviamento | 4.OUT44 | 16B | O28 | TESTA 18: Salita | 4.OUT60 | ||
| 17A | O13 | TESTA 13: Salita | 4.OUT45 | 17B | O29 | TESTA 18: Discesa | 4.OUT61 | ||
| 18A | O14 | TESTA 13: Discesa | 4.OUT46 | 18B | O30 | TESTA 19: Avviamento | 4.OUT62 | ||
| 19A | O15 | TESTA 14: Avviamento | 4.OUT47 | 19B | O31 | TESTA 19: Salita | 4.OUT63 | ||
| 20A | O16 | TESTA 14: Salita | 4.OUT48 | 20B | O32 | TESTA 19: Discesa | 4.OUT64 |
SLOT 6 (H1-P32) opzionale
| A Side | Pin | ID | Descrizione | Indirizzo | B Side | Pin | ID | Descrizione | Indirizzo |
|---|---|---|---|---|---|---|---|---|---|
| | 1A | V+ | Voltage input 12÷28 Vdc | | 1B | V+ | Voltage input 12÷28 Vdc | ||
| 2A | V- | 2B | V- | ||||||
| 3A | O1 | TESTA 20: Avviamento (opzionale) | 4.OUT65 | 3B | O17 | Riserva | 4.OUT81 | ||
| 4A | O2 | TESTA 20: Salita (opzionale) | 4.OUT66 | 4B | O18 | 4.OUT82 | |||
| 5A | O3 | TESTA 20: Discesa (opzionale) | 4.OUT67 | 5B | O19 | 4.OUT83 | |||
| 6A | O4 | TESTA 21: Avviamento (opzionale) | 4.OUT68 | 6B | O20 | 4.OUT84 | |||
| 7A | O5 | TESTA 21: Salita (opzionale) | 4.OUT69 | 7B | O21 | 4.OUT85 | |||
| 8A | O6 | TESTA 21: Discesa (opzionale) | 4.OUT70 | 8B | O22 | 4.OUT86 | |||
| 9A | O7 | TESTA 22: Avviamento (opzionale) | 4.OUT71 | 9B | O23 | 4.OUT87 | |||
| 10A | O8 | TESTA 22: Salita (opzionale) | 4.OUT72 | 10B | O24 | 4.OUT88 | |||
| 11A | V+ | Voltage input 12÷28 Vdc | 11B | V+ | Voltage input 12÷28 Vdc | ||||
| 12A | V- | 12B | V- | ||||||
| 13A | O9 | TESTA 22: Discesa (opzionale) | 4.OUT73 | 13B | O25 | Riserva | 4.OUT89 | ||
| 14A | O10 | Riserva | 4.OUT74 | 14B | O26 | 4.OUT90 | |||
| 15A | O11 | Riserva | 4.OUT75 | 15B | O27 | 4.OUT91 | |||
| 16A | O12 | Riserva | 4.OUT76 | 16B | O28 | 4.OUT92 | |||
| 17A | O13 | Riserva | 4.OUT77 | 17B | O29 | 4.OUT93 | |||
| 18A | O14 | Riserva | 4.OUT78 | 18B | O30 | 4.OUT94 | |||
| 19A | O15 | Riserva | 4.OUT79 | 19B | O31 | 4.OUT95 | |||
| 20A | O16 | Riserva | 4.OUT80 | 20B | O32 | 4.OUT96 |
RMC-3M
CN1- Power supply (Ingresso Alimentazione - 24 Vdc)
| | 1 | 0V alimentazione DC |
| 2 | Terra | |
| 3 | 24V alimentazione DC |
CN2 - CN3 - PORTA CAN
| | 1 | 0 Volt - Comune Porta seriale |
| 2 | B | |
| 3 | A |
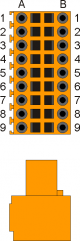
SLOT 3 (H1-I16)
| Pin | ID | Descrizione | Indirizzo | |
|---|---|---|---|---|
 | 1A | +24V | Out 24 Volt | |
| 1B | 0V | |||
| 2A | I1 | Sensore Barriera 1 | 5.INP01 | |
| 3A | I2 | Sensore Barriera 2 | 5.INP02 | |
| 4A | I3 | Sensore Barriera 3 | 5.INP03 | |
| 5A | I4 | Sensore Barriera 4 | 5.INP04 | |
| 6A | I5 | Sensore Barriera 5 | 5.INP05 | |
| 7A | I6 | Sensore Barriera 6 | 5.INP06 | |
| 8A | I7 | Sensore Barriera 7 | 5.INP07 | |
| 9A | I8 | Sensore Barriera 8 | 5.INP08 | |
| 2B | I9 | Sensore Barriera 9 | 5.INP09 | |
| 3B | I10 | Sensore Barriera 10 | 5.INP10 | |
| 4B | I11 | Sensore Barriera 11 | 5.INP11 | |
| 5B | I12 | Sensore Barriera 12 | 5.INP12 | |
| 6B | I13 | Sensore Barriera 13 | 5.INP13 | |
| 7B | I14 | Sensore Barriera 14 | 5.INP14 | |
| 8B | I15 | Sensore Barriera 15 | 5.INP15 | |
| 9B | I16 | Sensore Barriera 16 | 5.INP16 |
SLOT 4 (H1-I16)
| Pin | ID | Descrizione | Indirizzo | |
|---|---|---|---|---|
| | 1A | +24V | Out 24 Volt | |
| 1B | 0V | |||
| 2A | I1 | Sensore Barriera 17 | 5.INP17 | |
| 3A | I2 | Sensore Barriera 18 | 5.INP18 | |
| 4A | I3 | Sensore Barriera 19 | 5.INP19 | |
| 5A | I4 | Sensore Barriera 20 | 5.INP20 | |
| 6A | I5 | Sensore Barriera 21 | 5.INP21 | |
| 7A | I6 | Sensore Barriera 22 | 5.INP22 | |
| 8A | I7 | Sensore Barriera 23 | 5.INP23 | |
| 9A | I8 | Sensore Barriera 24 | 5.INP24 | |
| 2B | I9 | Sensore Barriera 25 | 5.INP25 | |
| 3B | I10 | Sensore Barriera 26 | 5.INP26 | |
| 4B | I11 | Sensore Barriera 27 | 5.INP27 | |
| 5B | I12 | Sensore Barriera 28 | 5.INP28 | |
| 6B | I13 | Sensore Barriera 29 | 5.INP29 | |
| 7B | I14 | Sensore Barriera 30 | 5.INP30 | |
| 8B | I15 | Sensore Barriera 31 | 5.INP31 | |
| 9B | I16 | Sensore Barriera 32 | 5.INP32 |
SLOT 5 (H1-I16)
| Pin | ID | Descrizione | Indirizzo | |
|---|---|---|---|---|
| | 1A | +24V | Out 24 Volt | |
| 1B | 0V | |||
| 2A | I1 | Sensore Barriera 33 | 5.INP33 | |
| 3A | I2 | Sensore Barriera 34 | 5.INP34 | |
| 4A | I3 | Sensore Barriera 35 | 5.INP35 | |
| 5A | I4 | Sensore Barriera 36 | 5.INP36 | |
| 6A | I5 | Sensore Barriera 37 | 5.INP37 | |
| 7A | I6 | Sensore Barriera 38 | 5.INP38 | |
| 8A | I7 | Sensore Barriera 39 | 5.INP39 | |
| 9A | I8 | Sensore Barriera 40 | 5.INP40 | |
| 2B | I9 | Sensore Barriera 41 | 5.INP41 | |
| 3B | I10 | Sensore Barriera 42 | 5.INP42 | |
| 4B | I11 | Sensore Barriera 43 | 5.INP43 | |
| 5B | I12 | Sensore Barriera 44 | 5.INP44 | |
| 6B | I13 | Sensore Barriera 45 | 5.INP45 | |
| 7B | I14 | Sensore Barriera 46 | 5.INP46 | |
| 8B | I15 | Sensore Barriera 47 | 5.INP47 | |
| 9B | I16 | Sensore Barriera 48 | 5.INP48 |
SLOT 6 (H1-I16)
| Pin | ID | Descrizione | Indirizzo | |
|---|---|---|---|---|
| | 1A | +24V | Out 24 Volt | |
| 1B | 0V | |||
| 2A | I1 | Sensore Barriera 49 | 5.INP49 | |
| 3A | I2 | Sensore Barriera 50 | 5.INP50 | |
| 4A | I3 | Sensore Barriera 51 | 5.INP51 | |
| 5A | I4 | Sensore Barriera 52 | 5.INP52 | |
| 6A | I5 | Sensore Barriera 53 | 5.INP53 | |
| 7A | I6 | Sensore Barriera 54 | 5.INP54 | |
| 8A | I7 | Sensore Barriera 55 | 5.INP55 | |
| 9A | I8 | Sensore Barriera 56 | 5.INP56 | |
| 2B | I9 | Sensore Barriera 57 | 5.INP57 | |
| 3B | I10 | Sensore Barriera 58 | 5.INP58 | |
| 4B | I11 | Sensore Barriera 59 | 5.INP59 | |
| 5B | I12 | Sensore Barriera 60 | 5.INP60 | |
| 6B | I13 | Sensore Barriera 61 | 5.INP61 | |
| 7B | I14 | Sensore Barriera 62 | 5.INP62 | |
| 8B | I15 | Sensore Barriera 63 | 5.INP63 | |
| 9B | I16 | Sensore Barriera 64 | 5.INP64 |
Setup
Accesso al setup
L'accesso al setup può essere fatto dalla pagina di MENU, introducendo la password 462.
 |
| Accesso all'area di setup tramite inserimento di password |
Introduzione al SETUP
-
Elenco dei parametri suddiviso in
-
 parametri generici;
parametri generici; -
 parametri associati al ponte;
parametri associati al ponte; -
 parametri associati alle teste;
parametri associati alle teste; -
 parametri associati alla barra dei sensori.
parametri associati alla barra dei sensori.
Setup Generico

Nome parametro Unità di misura Default Range Descrizione PG01 : LINGUA - ITA 1 ÷ 2 1: ITALIANO
2: INGLESEPG03 : PUNTO DECIMALE - 1 0 ÷ 3 E' la posizione del punto decimale nelle visualizzazioni delle quote. PG05 : STEP ORIZZONTALE mm 50.0 - Passo di acquisizione orizzontale.
Distanza tra le acquisizioni dello stato della barra di sensori.PG06 : STEP VERTICALE mm 50.0 - Passo di acquisizione verticale.
Distanza tra le fotocellule della barra di sensori.PG08 : LINE MEASURE mm 1 0 ÷ 999999 Indica lo spazio, in unità di misura, percorso dal nastro per ottenere gli impulsi encoder impostati sul parametro pulse. PG09 : LINE PULSE - 1 0 ÷ 999999 Indica gli impulsi moltiplicato 4 forniti dall'encoder del nastro per ottenere lo spazio impostato nel parametro measure.
Il rapporto tra measure e pulse è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935.PG11 : AUTOAPPR. PONTE - OFF 0 ÷ 1 Abilita l'opzione di autoapprendimento quota minima e massima della lastra per ottimizzare il brandeggiamento del ponte. PG13 : LATO OPERATORE - FWD 0 ÷ 1 Indica all'evento di stop ciclo, dove deve posizionarsi il ponte.
FWD = sulla quota massima, BWD = sulla quota minima.PG15 : SELETTORE AUTO/MAN - ON 0 ÷ 1 Abilitazione selettore manuale/automatico. PG16 : TEMPO PRESTART s 3.0 0 ÷ 9999.9 Tempo che intercorre tra comando di start e l'effettivo avviamento della macchina (in questo tempo è attivo il segnale di warning).
Se inferiore al tempo di attivazione motori, viene applicato il maggiore tra i due.PG17 : LUBRIF. TIME ON s 0.0 0 ÷ 9999.9 Tempo di uscita lubrificazione ON. PG18 : LUBRIF. TIME OFF s 0.0 0 ÷ 9999.9 Tempo di uscita lubrificazione OFF. PG19 : ENGINES TIME ON s 1.000 0 ÷ 99.999 Tempo di pausa tra l'attivazione di un motore e il successivo (nell'attivazione sequenziale). PG20 : ENGINES TIME OFF s 0.200 0 ÷ 99.999 Tempo di pausa tra la disattivazione di un motore e il successivo (nella disattivazione sequenziale). PG21 : TIME ENGINE OFF
ON EXIT BELTs 0.000 0 ÷ 99.999 Tempo di attesa per iniziare la disattivazione sequenziale dei motori, a partire da quando non sono più presenti pezzi sul nastro. PG25 : OUTPUT TESTE - CONST CONST ÷ PULSE Modo di funzionamento dell'uscita di attivazione delle teste.
CONST = l'uscita rimane attiva per tutto il tempo di utilizzo della testa,
PULSE = l'uscita rimane attiva per un tempo impostato (PG27).PG26 : OUTPUT LINEA - CONST CONST ÷ PULSE Modo di funzionamento dell'uscita di attivazione del nastro.
CONST = l'uscita rimane attiva per tutto il tempo di utilizzo del nastro,
PULSE = l'uscita rimane attiva per un tempo impostato (PG27).PG27 : TEMPO PULSE s 0.000 0 ÷ 99.999 Tempo di attivazione delle uscite delle teste e del nastro se sono abilitate come impulsive. PG28 : RITARDO LINEA s 0.000 0 ÷ 99.999 Tempo di ritardo attivazione del nastro dopo che il ponte è partito. PG30 : ANTICIPO SPAZ mm 0.0 -9999.9 ÷ 9999.9 Spazio di anticipo per l'abbassamento dello spazzolone. PG31 : RITARDO SPAZ mm 0.0 -9999.9 ÷ 9999.9 Spazio di ritardo per salita dello spazzolone. PG32 : V RIFERIMENTO m/' 0.0 0 ÷ 9999.9 Velocità di riferimento per l'utilizzo degli anticipi e ritardi dello spazzolone.
Se posto a 0, non viene fatta alcuna proporzione di velocità ma vengono utilizzate le quote impostate in maniera costante.Setup Ponte

Nome parametro Unità di misura Default Range Descrizione PB01 : MEASURE mm 0.1 0 ÷ 99999.9 Indica lo spazio, in unità di misura, percorso dal ponte per ottenere gli impulsi encoder impostati sul parametro pulse. PB02 : PULSE - 1 0 ÷ 999999 Indica gli impulsi moltiplicato 4 forniti dall'encoder del ponte per ottenere lo spazio impostato nel parametro measure.
Il rapporto tra measure e pulse è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935.PB03 : TOLLERANZA mm 5.0 0 ÷ 99999.9 Definisce una fascia di conteggio intorno alle quote di posizionamento.
Se il posizionamento si conclude entro tale fascia, è da considerarsi corretto.PB04 : TEMPO ABILITAZIONE s 0.200 0.000 ÷ 9.999 Tempo di abilitazione prima dell'avvio dello spostamento del ponte. PB05 : TEMPO DI DISABILITAZIONE s 0.200 0.000 ÷ 9.999 Tempo di disabilitazione dopo la fine dello spostamento del ponte. PB06 : QUOTA MASSIMA mm 99999.9 -99999.9 ÷ 99999.9 Massima quota raggiungibile dal ponte. PB07 : QUOTA MINIMA mm -99999.9 -99999.9 ÷ 99999.9 Minima quota raggiungibile dal ponte. PB08 : TEMPO ACCERAZIONE s 1.00 0.00 ÷ 9.99 E' il tempo necessario per passare da velocità 0 a velocità massima. PB09 : TEMPO DECELERAZIONE s 1.00 0.00 ÷ 9.99 E' il tempo necessario per passare da velocità massima a velocità 0. PB10 : TEMPO INVERSIONE s 0.50 0.00 ÷ 9.99 Viene utilizzato per evitare stress meccanici dovuti a troppo rapide inversioni del senso di movimento. PB11 : TEMPO DISATTIVAZ. s 0 0 ÷ 99999 Tempo di riposo del ponte oltre il quale viene disattivata l'uscita di abilitazione dell'asse. PB12 : MODO USCITA - STILL MOVE, STILL Modalità di funzionamento di uscita di abilitazione dell'asse.
MOVE: L'uscita si attiva prima del movimento dell'asse e si disattiva dopo che questo è terminato, secondo le tempistiche impostate sui parametri PB04 e PB05.
STILL: L'uscita si attiva prima del movimento e si disattiva solamente quando lo stato passa in emergenza.PB14 : QUOTA PRESET mm 0.0 -99999.9 ÷ 99999.9 Quota associata all'asse durante la procedura di homing. PB15 : VELOCITA PRESET % 5 1 ÷ 100 E' la velocità di ricerca del sensore di homing. PB16 : VELOCITA LENTA PRESET % 2 1 ÷ 100 E' la velocità per il rilascio del sensore di homing. PB17 : DIREZIONE PRESET - AVANTI AVANTI, INDIETRO Direzione verso cui cercare il sensore di homing. PB19 : QUOTA CAMBIO ABR mm 0.0 -99999.9 ÷ 99999.9 Quota di posizionamento ponte quando viene richiesto di interrompere il ciclo per cambiare l'abrasivo. Tarature
Le pagine di taratura si suddividono in:
-
 impostazione della risoluzione dell'asse;
impostazione della risoluzione dell'asse; -
 procedura di taratura asse per la regolazione della retroazione e per impostazione di offset e velocità massima.
procedura di taratura asse per la regolazione della retroazione e per impostazione di offset e velocità massima.

Nome parametro Unità di misura Default Range Descrizione MEASURE mm 0.1 0 ÷ 99999.9 Indica lo spazio, in unità di misura, percorso dal nastro per ottenere gli impulsi encoder impostati sul parametro pulse. PULSE - 1 0 ÷ 999999 Indica gli impulsi moltiplicato 4 forniti dall'encoder del nastro per ottenere lo spazio impostato nel parametro measure.
Il rapporto tra measure e pulse è la risoluzione dell'encoder e deve avere valori compresi tra 1 e 0.000935.Procedura 1 Posizionare l'asse più indietro possibile e in modo tale che si riesca a segnare la posizione di partenza. 2 Azzerare il valore ENCODER con il tasto  .
.3 Spostare in jog l'asse nel verso positivo facendogli fare la maggior corsa possibile. 4 Impostare il valore del parametro PULSE con la cifra letta nel parametro ENCODER. 5 
Misurare lo spostamento reale dell'asse dalla quota di partenza segnata fino alla posizione raggiunta ed inserire la misura ottenuta nel parametro MEASURE.
Inserire il valore nell'unità di misura intera che si intende utilizzare in seguito.
Es. Se il valore misurato è di 115,3 mm, si deve inserire il valore 1153 se si desiderano i decimi di mm oppure il valore 11530 se si desiderano i centesimi di mm.
IMPORTANTE: per un corretto funzionamento del posizionatore, prestare attenzione di inserire un valore di MEASURE minore o al massimo uguale al valore di PULSE.
Di seguito forniremo un elenco di operazioni da eseguire per la taratura della controllo di spazio degli assi (PI + FF).
La retroazione di spazio permette di correggere la posizione dell'asse in funzione dell'errore di inseguimento rilevato.
In questa pagina i dati in giallo sono quelli che consentono la parametrizzazione della taratura dell'asse.
Mentre i dati in verde sono dati di servizio che perdono il loro significato quando si esce da questa pagina.Nome parametro Unità di misura Default Range Descrizione OUT TENSIONE V 0.0 -10.0 ÷ 10.0 E' il valore della tensione di uscita, espressa in decimi di volts, inviata direttamente al device. OFFSET V 0.0000 -99.9999 ÷ 99.9999 Valore di tensione che viene sommato all'uscita analogica per compensare l'offset di tensione dell'impianto. VELOCITA mm/' - - E' il valore della velocità istantanea dell'asse. MAX VELOCITA mm/' 5000 0 ÷ 9999999 Velocità dell'asse corrispondente a 10V erogati dall'uscita analogica. POSIZIONE mm - - E' il valore della posizione istantanea dell'asse. DELTA mm 0.0 - Delta di spostamento tra un posizionamento ed un altro. SET VELOCITA mm/' 0 - Velocità di spostamento in posizionamento. TEMPO ACC. s 0.00 - Tempo di accelerazione in posizionamento. TEMPO DEC. s 0.00 - Tempo di decelerazione in posizionamento. FEEDFORWARD % 100.0 0.0 ÷ 200.0 È il coefficiente percentuale che, moltiplicato per la velocità, genera la parte feed-forward dell'uscita di regolazione. PROP. GAIN - 0.000 0.000 ÷ 9.999 È il coefficiente che moltiplicato per l'errore di inseguimento genera la parte proporzionale dell'uscita di regolazione. T INTEGRALE s 0.000 0.000 ÷ 9.999 È il tempo che produce il coefficiente di integrazione dell'errore di inseguimento.
L'integrazione di tale errore moltiplicata per tale coefficiente genera la parte integrale dell'uscita di regolazione.MAX ERR. INSEG. mm 99.9 0.0 ÷ 99999.9 Definisce il massimo scostamento accettabile tra la posizione teorica e la posizione reale dell'asse. ERRORE INSEG. mm - - E' il valore istantaneo dell'errore di inseguimento. Le seguenti operazioni devono essere eseguite una volta che sono stati impostati i seguenti parametri nelle pagine dei parametri dell'asse:
-
RISOLUZIONE: impostare la risoluzione corretta.
-
MASSIMA POSIZIONE: inserire un valore molto grande positivo (Es.: 9999 mm)
-
MINIMA POSIZIONE: inserire un valore molto grande negativo (Es.: - 9999 mm)
Per eseguire una delle tarature descritte, devono essere soddisfatte le seguenti condizioni:
 Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
Assicurarsi che il pulsante di emergenza tolga potenza ai motori in modo da essere in condizione di sicurezza nel caso in cui la macchina dovesse muoversi in modo incontrollato.
 Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Ripristinare la macchina da eventuali condizioni di emergenza resettando gli allarmi.
Impostazione del parametro OFFSET 1 Premere  per attivare la calibrazione.
per attivare la calibrazione.2 Inserire il valore 0 (zero) nel parametro OUT TENSIONE. 3 Agire sul parametro OFFSET (con un inserimento diretto, usando i tasti  ,
,  , oppure attraverso la procedura automatica dal tasto
, oppure attraverso la procedura automatica dal tasto  ) in modo che la POSIZIONE dell'asse non sia variabile (o vari molto lentamente).
) in modo che la POSIZIONE dell'asse non sia variabile (o vari molto lentamente).4 Premere  per disattivare la calibrazione.
per disattivare la calibrazione.Verifica conteggio e senso di rotazione: si deve verificare che ad una tensione in uscita maggiore di 0 (zero) corrisponda una variazione incrementale della posizione dell'asse. 1 Premere per attivare la calibrazione.2 Inserire un valore positivo nel parametro VOUT. 3 Verificare che il valore del parametro POSIZIONE si incrementi. 4 Premere per disattivare la calibrazione: la tensione in uscita VOUT si azzera senza rampa.5 Se il senso di rotazione del motore non è corretto si deve intervenire sul cablaggio invertendo i segnali PHA e PHB.Velocità massima: determinare la velocità di movimento dell'asse che corrisponde ad una tensione di 10V in uscita. 1 Premere per attivare la calibrazione.2 Inserire un valore positivo nel parametro VOUT (Se possibile inserire un valore vicino a 10V). 3 Leggere il valore visualizzato nel parametro VELOCITA. 4 Determinare il valore del parametro MAX VELOCITA con la formula:
$ \text{MAX VELOCITA} = \dfrac{10\cdot \text{VELOCITA}}{\text{VOUT}} $5 Premere per disattivare la calibrazione: la tensione in uscita VOUT si azzera senza rampa.6 Inserire il valore calcolato nella MAX VELOCITA. Parametri per la retroazione di spazio: i parametri interessati sono FEEDFORWARD, PROP. GAIN e T INTEGRALE. Una volta eseguite correttamente le fasi precedenti, continuare con: 1 Inserire il valore 100.0% nel parametro FEEDFORWARD. 2 Inserire il valore minimo (0.001) nel parametro PROP. GAIN. 3 Se il valore ERRORE INSEG. è diverso da 0 (zero), si potrà notare un movimento dell'asse che tende a ridurre tale valore. 4 Inserire ora una valore di spazio nel parametro DELTA e un valore di velocità nel parametro SET VELOCITA (minore del valore di MAX VELOCITA). 5 Premere  per avviare la successione di movimenti dell'asse.
per avviare la successione di movimenti dell'asse.6 L'asse in taratura inizierà un movimento in avanti di uno spazio pari a DELTA ad una velocità SET VELOCITA. 7 Una volta concluso il primo posizionamento ritornerà nella posizione iniziale per poi riprendere il movimento. 8 Durante questi movimenti è possibile controllare il valore di ERRORE INSEG. e agire sui parametri FEEDFORWARD e PROP. GAIN per cercare di mantenerlo a valori più bassi possibile.
I criteri da seguire sono:
-
Aumentare gradualmente il valore di PROP. GAIN finché l'asse non vibra eccessivamente nella fase di arresto. A quel punto ridurre leggermente il valore per avere un comportamento accettabile.
-
Il valore di FEEDFORWARD deve essere variato con la seguente regola:
Errore inseg. >0 <0 Verso del
movimentoAvanti Aumentare
FEEDFORWARDRidurre
FEEDFORWARDIndietro Ridurre
FEEDFORWARDAumentare
FEEDFORWARD9 Durante questi movimenti il superamento della soglia da parte dell'errore di inseguimento non crea un allarme della macchina, ma viene semplicemente segnalato tramite il simbolo  . E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.
. E' necessario quindi porre estrema attenzione durante questa fase alla modifica dei parametri del PID.10 Premere  per concludere i posizionamenti.
per concludere i posizionamenti.Setup Teste

Nome parametro Unità di misura Default Range Descrizione PT01 / PT22 : DIAMETRO mm 0.0 0 ÷ 99999.9 Diametro della testa. PT23 / PT44 : OFFSET VERTICALE mm 0.0 0 ÷ 99999.9 E' la distanza tra la testa di lavoro e la linea mediana del ponte. PT45 / PT66 : TEMPO SALITA PARZIALE s 0.500 0 ÷ 999.999 E' il tempo di eccitazione dell'uscita per la risalita parziale. PT67 : MODALITA' FRENO - Out Off
con freno AttivatoOut Off ÷ Out On
con freno AttivatoStato dell'uscita dei freni quando è essi sono attivi. PT68 : RITARDO SALITA s 0.000 0 ÷ 999.999 Ritardo per la salita totale delle teste. Setup Sensori

Nome parametro Unità di misura Default Range Descrizione PS01 : NUMERO SENSORI - 32 8 ÷ 64 Numero dei sensori presenti sulla barra di acquisizione. PS02 : TIPO FOTOCELLULA - NO NO ÷ NC Logica degli ingressi di acquisizione lastra.
NO = Normalmente Aperto
NC = Normalmente ChiusoAssistenza
Per poterti fornire un servizio rapido, al minimo costo, abbiamo bisogno del tuo aiuto.


Segui tutte le istruzioni fornite nel manuale MIMAT Se il problema persiste, compila il “Modulo richiesta assistenza” nella pagina Contatti del sito www.qem.it.
I nostri tecnici otterranno gli elementi essenziali per comprendere il tuo problema.Riparazione
Per poterVi fornire un servizio efficente, Vi preghiamo di leggere e attenerVi alle indicazioni qui riportate
Spedizione
Si consiglia di imballare lo strumento con materiali in grado di assorbire eventuali cadute.



Utilizzare l'imballo originale: deve proteggere lo strumento durante il trasporto. Allega:
1. Una descrizione dell'anomalia;
2. Parte dello schema elettrico in cui è inserito lo strumento
3. Programmazione dello strumento (setup, quote di lavoro, parametri…).Una descrizione approfondita del problema ci consentirà di identificare e risolvere rapidamente il tuo problema.
Un accurato imballaggio eviterà ulteriori inconvenienti. -
- Ultima modifica: 2019/08/29 17:01