MDI_P1P20F-018: Manuale installatore
1. Informazioni
1.1 Release
| |
|||
| Documento: | mdi_p1p20f-018 | ||
|---|---|---|---|
| Descrizione: | Manuale dell'installatore p1p20f-018 | ||
| Redattore: | Michele Sandri | ||
| Approvatore | Gabriele Bazzi | ||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/qmoveplus/j1p20/p1p20f-018/mdi_p1p20f-018 | ||
| Lingua: | Italiano | ||
| Release documento | Descrizione | Note | Data |
| 01 | Nuovo manuale | 07/08/2019 | |
| 02 | Aggiunto parametro PG-19 (Massimo numero di giri disco) | 19/07/2021 | |
Specificazioni
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM.
QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento.
Marchi registrati :
-
QEM® è un marchio registrato.
2. Descrizione
Il software applicativo P1P20F-018, installato su hardware J1-P20-FZ20, è stato realizzato per automatizzare una fresa a 3 assi per il taglio della pietra (assi Z e Y controllati, asse X su fine corsa oppure con strumento MC235.09 che autoapprende la posizione dei fine corsa con un encoder). Tutti gli assi sono controllati tramite comandi digitali associati ad un'uscita analogica 0-10 Vdc oppure +/- 10Vdc.
3. Hardware
| J1-P20-FZ20 | |
|---|---|
 |
|
 |
|
 | J1-P20-Fx:Manuale di Installazione e Manutenzione |
3.1 Tasti Funzione e LED
| Tasto | Icona | Funzione | Led | Tasto | Icona | Funzione | Led |
|---|---|---|---|---|---|---|---|
| F1 |  | Semiautomatico | Semiautomatico attivo | F4 |  | Laser | Laser attivo |
| F2 |  | Restart | - | F5 | Disponibile | - | - |
| F3 |  | Lento / Veloce | ON = Veloce attivo | F6 |  | Allarme | Presenza allarme |
| - - - - | - - - - | - - - - | - - - - | F7 |  | Uscita | - |
3.2 Simboli e tasti
| Buttone | Descrizione | ———————– | Simboli barra superiore | Descrizione |
|---|---|---|---|---|
| | Premere per confermare | | In inizializzazione | |
| | Selezione | | Emergenza | |
 | Pagina precedente | | Manuale | |
 | Pagina successiva | | Homing attivo | |
 | Area riservata | | Semiautomatico | |
| | Apri file da USB | | Automatico - ciclo OFF | |
| | Salva | | Automatico - ciclo ON | |
 | Anteprima lavorazione | | Modalità taratura | |
| | Setup Protetto/Sprotetto | |||
| | I dati in giallo sono modificabili | |||
| - - - - | - - - - | - - - - | - - - - | - - - - |
3.3 Startup
| START | | OPPURE  per uscire |
 |
||
| HOMING |  | OPPURE F7 per uscire |
| |
||
| MENU PRINCIPALE |  | |
4. SETUP
F7  | |
|||
| |
||||
 |  |
|||
| |
||||
 PASSWORD 462 |  |
|||
 | Parametri di SETUP | ||
 | Calibrazione assi | ||
 | Carica i parametri di default | ||
| | Diagnostica |  | Scelta lingua. ITALIANO / INGLESE |
| | Sblocca area di setup Disabilita la password fino al riavvio | | Blocca area di setup Accesso solo con password |
 | Imposta data e ora del sistema | ||
| - - - - | - - - - | - - - - | - - - - |
4.1 Carica parametri di default
| F7 | |
|||
| |
||||
| | |
|||
| |
||||
| PASSWORD 462 | |
|||
| |
||||
| |
||||
| |
||||
 |
||||
| |
||||
| SI Carica Default | NO Cancella |
|||
5. Parametri di SETUP
| F7 | |
|||
| |
||||
| | |
|||
| |
||||
| PASSWORD462 | |
|||
| |
||||
| |
||||
| |
||||
 |
||||
5.1 Parametri Generici
GEN  | |
| Parametro | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PG-01 : PUNTI DECIMALI | - | 1 | 0 - 2 | Numero di punti decimali per le posizioni degli assi |
| PG-02 : BUZZER HMI | - | 0 | 0 - 1 | 0: buzzer abilitato 1: buzzer disabilitato. |
| PG-03 : TIMER SIRENA | s | 10 | 0 - 999 | Durata della segnalazione di allarme. |
| PG-04 : HDR | - | 0 | 0 - 2 | 0: Visualizzazione normale 1: L'HDR è attivo, nella fascia centrale fra due unità 2: L'HDR è attivo su tutto il range del conteggio. |
| PG-05 : TIMER FINE CICLO | min | 2 | 0 - 9999 | Parte alla fine di un ciclo automatico. |
| PG-06 : TIMER ATTIVAZIONE AUSILIARI | s | 2 | 0 - 9999 | Timer di attesa attivazione degli ausiliari all'accensione della macchina. |
| PG-07 : TIMER LASER | s | 30 | 0 - 9999 | E' il tempo di accensione del laser quando viene attivato. |
| PG-08 : TIMER FLUSSOSTATO 1 | s | 5 | 0 - 9999 | Con ciclo automatico, se manca acqua, dopo questo tempo si passa allo stato di stand-by attesa ripristino pressione. In manuale si passa nello stato di allarme. |
| PG-09 : TIMER FLUSSOSTATO 2 | s | 60 | 0 - 9999 | Se la macchina è in stand-by ripristino pressione, dopo questo tempo si passa nello stato di allarme. |
| PG-10 : JOG ASSE X | - | 0 | 0 - 1 | Modalità di azionamento del jog asse X. 0: Il jog si attiva sul fronte di salita dell'ingresso e si disattiva sul fronte di discesa; 1: Il jog si attiva all'attivazione dell'ingresso e si disattiva con il successivo fronte di salita |
| PG-11 : FILTRO DISATTIVAZIONE FINECORSA ASSE X- | s | 0.2 | 0 - 9999 | Tempo di controllo per la disattivazione del finecorsa negativo dell'asse X. |
| PG-12 : FILTRO ATTIVAZIONE FINECORSA ASSE X- | s | 0.2 | 0 - 9999 | Tempo di controllo per l'attivazione del finecorsa negativo dell'asse X. |
| PG-13 : FILTRO DISATTIVAZIONE FINECORSA ASSE X+ | s | 0.2 | 0 - 9999 | Tempo di controllo per la disattivazione del finecorsa positivo dell'asse X. |
| PG-14 : FILTRO ATTIVAZIONE FINECORSA ASSE X+ | s | 0.2 | 0 - 9999 | Tempo di controllo per l'attivazione del finecorsa positivo dell'asse X. |
| PG-15 : MASSIMA CORRENTE | A | 100.0 | 0 - 999.9 | Massimo assorbimento del disco quando l'ingresso analogico è a fondo scala. |
| PG-16 : TIMER ASSORBIMENTO CORRENTE | s | 1 | 0 - 9999 | In caso di superamento della soglia di corrente, dopo questo tempo si passa nello stato di allarme. |
| PG-17 : MODO VELOCE ASSI | - | 0 | 0 - 1 | 0: gli assi Y, Z commutano in veloce dopo 3 s dall'attivazione del jog ; 1: gli assi Y, Z commutano in veloce all'attivazione del tasto funzione F3 |
| PG-18 : MODO HOMING | - | 1 | 0 - 3 | 0: Homing necessario per abilitare tutte le altre operazioni; 1: Homing non necessario, tutte le funzioni sono abilitate; 2: Homing necessario per abilitare il ciclo automatico, altrimenti sono abilitati solo i movimenti in manuale, 3: Homing disabilitato. |
| PG-19 : MASSIMO NUMERO DI GIRI | RPM | 2480 | 0 - 999999 | Massimo numero di giri del disco quando l'ingresso analogico è a fondo scala. |
5.2 Setup asse X
| X SETUP  | |
| Parametro | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PX-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PX-02. Attualmente non utilizzato |
| PX-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PX-01. PX-01/PX-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. Attualmente non utilizzato |
| PX-03 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa tra l'abilitazione dell'asse e lo start al movimento. |
| PX-04 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa dopo la fermata dell'asse. |
| PX-05 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Massima quota raggiungibile dall'asse. Finecorsa software. Attualmente non utilizzato |
| PX-06 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Minima quota raggiungibile dall'asse. Finecorsa software. Attualmente non utilizzato |
| PX-07 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. Attualmente non utilizzato |
| PX-08 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa rilascio freno prima dello start movimento e chiusura dopo lo stop. Attualmente non utilizzato |
| PX-09 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
| PX-10 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo durante l'inversione del movimento. |
5.3 Setup assi Y , Z
| Y SETUP  Z SETUP  | |
| Parametro | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PY-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PY-02. |
| PY-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PY-01. PY-01/PY-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
| PY-03 : TOLLERANZA | mm | 0.50 | 0 - 999.99 | Massimo scostamento tra la posizione attuale e la posizione target. Se l'asse si ferma all'interno di questa finestra, il posizionamento è considerato corretto. |
| PY-04 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa tra l'abilitazione dell'asse e lo start al movimento. |
| PY-05 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa dopo la fermata dell'asse. |
| PY-06 : RALLENTAMENTO | mm | 50.0 | 0 - 99999.9 | Spazio prima della posizione target dove si passa in velocità lenta. |
| PY-07 : INERZIA AVANTI | mm | 0 | 0 - 999.99 | Spazio di inerzia alla fine del movimento avanti. |
| PY-08 : INERZIA INDIETRO | mm | 0 | 0 - 999.99 | Spazio di inerzia alla fine del movimento indietro. |
| PY-09 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
| PY-10 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo tra la fermata dell'asse e il controllo della tolleranza. |
| PY-11 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
| PY-12 : OLTREQUOTA | mm | 0 | 0 - 9999.9 | Oltrequota per il recupero giochi. |
| PY-13 : VELOCITA' MASSIMA | - | 0 | 0 - 99999 | Massima velocità dell'asse. |
| PY-14 : VELOCITA' MINIMA | - | 0 | 0 - 99999 | Minima velocità dell'asse. |
| PY-15 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante il ciclo automatico. In % dei 10 Vdc. |
| PY-16 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Velocità lenta dell'asse durante il ciclo automatico. In % dei 10 Vdc. |
| PY-17 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante il jog. In % dei 10 Vdc. |
| PY-18 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Velocità lenta dell'asse durante il jog. In % dei 10 Vdc. |
| PY-19 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante la ricerca di homing. In % dei 10 Vdc. |
| PY-20 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità lenta dell'asse dopo l'inversione in homing. In % dei 10 Vdc. |
| PY-21 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
| PY-22 : QUOTA DI HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione forzata alla fine della procedura di homing. |
| PY-23 : TIPO HOMING | - | 0 | 0 - 3 | 0: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PY-22 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PY-22 sul segnale di zero encoder 2: L'asse esegue l'homing senza muoversi. Carica la quota PY-22 al segnale del sensore di homing 3: Homing disabilitato. |
| PY-24 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0:avanti 1:indietro |
| PY-25 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Massima quota raggiungibile dall'asse. Finecorsa software. |
| PY-26 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Minima quota raggiungibile dall'asse. Finecorsa software. |
| PY-27 : MINIMO SPOSTAMENTO | mm | 1 | 0 - 999.9 | Controllo rottura encoder: minimo spostamento eseguito dall'asse. |
| PY-28 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Controllo rottura encoder: tempo di controllo del minimo spostamento PY-27. |
| PY-29 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
| PY-30 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa rilascio freno prima dello start movimento e chiusura dopo lo stop. |
| PY-31 : ACCELERAZIONE | ms | 20.00 | 0 - 99.99 | Valore di accelerazione. |
| PY-32 : DECELERAZIONE | ms | 20.00 | 0 - 99.99 | Valore di decelerazione. |
| Modalità posizionamento ad impulsi |
||||
| PY-33 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
| PY-34 : QUOTA DI AVVICINAMENTO | mm | 0.30 | 0 - 9999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. |
| PY-35 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. |
| PY-36 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. |
| PY-37 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. |
| PY-38 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. |
| Varie |
||||
| PY-39 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
| PY-40 : TIPO RALLENTAMENTO | - | 0 | 0 - 2 | Calcolo del rallentamento: 0: fisso con parametro PY-06 1: proporzionale alla velocità rilevata 2: proporzionale al quadrato della velocità rilevata |
| PY-41 : RALLENTAMENTO MASSIMO | mm | 0 | 0 - 9999.9 | Massimo rallentamento alla massima velocità PY-13. |
| PY-42 : RALLENTAMENTO MINIMO | mm | 0 | 0 - 9999.9 | Minimo rallentamento che può essere utilizzato. |
| PY-43 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo durante l'inversione del movimento. |
| PY-44 : TIPO USCITA ANALOGICA | - | 0 | 0 - 1 | 0: uscita analogica associata +/-10Vdc 1: uscita analogica associata 0-10Vdc |
| PY-45 : ABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: fuori tolleranza solo visualizzato 1: allarme abilitato |
6. Diagnostica
| F7 | |
|||
| |
||||
| | |
|||
| |
||||
| PASSWORD:462 | |
|||
| |
||||
 | I/O |  |
||
| |
||||
INGRESSI  | USCITE  |
|||
| |
||||
CONTEGGI  | USCITE ANALOGICHE  |
|||
| |
||||
INGRESSI ANALOGICI  | ||||
6.1 CPU DATA
 | Fw name : codice firmware e relativo checksum Task time : tempo medio del ciclo CPU Maximum Time e Minimum Time limiti registrati CPU time : tempo totale della CPU nello stato di RUN (hh:mm) |
6.2 Ingressi digitali
| INGRESSI  | | Stato degli ingressi digitali |
| Pagina precedente | |
| Pagina successiva |
6.3 Uscite digitali
| USCITE | | Stato delle uscite digitali |
| Pagina precedente | |
| Pagina successiva | |
 | Premere per passare alla modalità di forzatura uscite Premere sull'uscita che si intende attivare. |
6.4 Conteggi encoder
| CONTEGGI | | Posizione assi  Stato dei canali encoder |
|
6.5 Uscite analogiche
| USCITE AN. | | Voltaggio uscite analogiche |
6.6 Ingressi analogici
| INGRESSI AN. | | Lettura ingressi analogici |
7. Calibrazione assi
| F7 | |
|||
| |
||||
| | |
|||
| |
||||
| PASSWORD:462 | |
|||
| |
||||
| |
||||
| |
||||
 |
||||
| |
||||
| RISOLUZIONE |  |
|||
7.1 Risoluzione
 →
→ 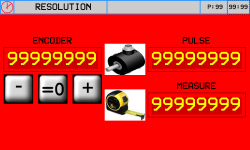
-
Premere il tasto
 (Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti
(Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti -
Premere il tasto
 (Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca
(Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca -
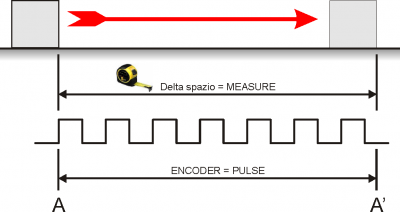
A - A' = Spazio più lungo possibile
-
Segnare la posizione di partenza (A)
-
Azzerare il valore ENCODER:

-
Eseguire il movimento da A ad A'
-
Trascrivere nel campo PULSE, il valore visualizzato nel campo ENCODER
-
Misurare il delta spazio A - A'
-
Scrivere il valore di delta spazio A - A' nel campo MEASURE
Importante:
-
Il valore di PULSE dovrà sempre essere superiore al valore di MEASURE (il valore ottimale è “MEASURE x 10 = PULSE”)
-
Introdurre il valore MEASURE nell'unità di misura scelta. Esempio: se l'unità di misura scelta è 1/10mm e la misura di delta spazio è 133.5mm, introdurre il valore 1335 nel campo MEASURE
-
I valori di Pulse e Misure qui inseriti , verranno trascritti automaticamente nei parametri GP-XX
8. Assistenza
Per poterti fornire un servizio rapido, al minimo costo, abbiamo bisogno del tuo aiuto.
 |  |
| Segui tutte le istruzioni fornite nel manuale MIMAT | Se il problema persiste, compila il “Modulo richiesta assistenza” nella pagina Contatti del sito www.qem.it. I nostri tecnici otterranno gli elementi essenziali per comprendere il tuo problema. |
Riparazione
Per poterVi fornire un servizio efficente, Vi preghiamo di leggere e attenerVi alle indicazioni qui riportate
Spedizione
Si consiglia di imballare lo strumento con materiali in grado di assorbire eventuali cadute.
 |  |  |
| Utilizzare l'imballo originale: deve proteggere lo strumento durante il trasporto. | Allega: 1. Una descrizione dell'anomalia; 2. Parte dello schema elettrico in cui è inserito lo strumento 3. Programmazione dello strumento (setup, quote di lavoro, parametri…). | Una descrizione approfondita del problema ci consentirà di identificare e risolvere rapidamente il tuo problema. Un accurato imballaggio eviterà ulteriori inconvenienti. |