Questa è una vecchia versione del documento!

DEVICE GEAR
1. Introduzione
Il device interno GEAR permette di controllare un asse slave in modo che segua un asse master secondo un determinato rapporto di trasmissione. Il device GEAR funziona solamente con assi controllati da device ANPOS2.
Le principali caratteristiche del device sono:
-
Impostazione rapporto di trasmissione con numeratore/denominatore per una precisa sincronizzazione
-
Comando degli assi indipendente quando la sincronizzazione è disattiva
-
Disattivazione sincronizzazione con rampa di frenata
-
Gestione di device di gruppo
1.1 Dichiarazione del device
1.1.1 Dichiarazione
Per poter usufruire del device è necessario eseguirne la dichiarazione nell'apposita sezione INTDEVICE della unit di configurazione.
;--------------------------------- ; Dichiarazione device interni ;--------------------------------- INTDEVICE ... <nome> GEAR REF_ANPOS2(AxeMaster) REF_ANPOS2(AxeSlave)
Dove:
| Nome campo | Descrizione | Esempio | Altro |
|---|---|---|---|
| <nome> | Nome assegnato al device | gear | - |
| GEAR | Parola chiave che identifica il device GEAR | - | - |
| REF_ANPOS2(AxeMaster) | Riferimento al device ANPOS2 per l'asse Master | AxeM | Vedi nota (1) |
| REF_ANPOS2(AxeSlave) | Riferimento al device ANPOS2 per l'asse Slave | AxeS | Vedi nota (1) |
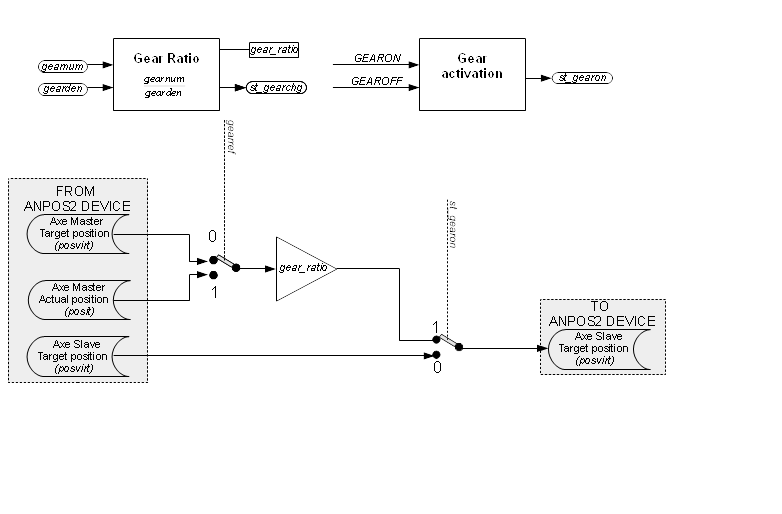
1.2 Descrizione del funzionamento
1.2.1 Funzionamento
Il funzionamento del device è illustrato dal seguente schema a blocchi:
1.3 Elenco Parametri
gearnum
| Breve descrizione | Numeratore rapporto di tramissione (master/slave) |
|---|---|
| Dimensione | Long |
| Valore di default | - |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | ÷ |
| ID parametro | 01 |
| Condizioni di scrittura | - |
Descrizione:
E' il numeratore del rapporto di trasmissione, che assieme al denominatore (gearden) stabilisce il rapporto tra lo spostamento dell'asse master e quello dell'asse slave. La modifica di questo parametro implica il calcolo del nuovo rapporto di trasmissione master/slave e l'azzeramento dello stato st_gearchg. Per modificare il rapporto di trasmisisone master/slave è quindi sempre necessario modificare prima gearden e poi gearnum.
gearden
| Breve descrizione | Denominatore rapporto di trasmissione (master/slave) |
|---|---|
| Dimensione | Long |
| Valore di default | - |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | < > 0 |
| ID parametro | 02 |
| Condizioni di scrittura | - |
Descrizione:
E' il denominatore del rapporto di trasmissione, che assieme al numeratore (gearnum) stabilisce il rapporto tra lo spostamento dell'asse master e quello dell'asse slave. La modifica di questo parametro non implica la modifica immediata del rapporto di trasmissione master/slave; esso viene calcolato e modificato nel momento della scrittura del parametro gearnum. La scrittura di questo parametro attiva lo stato st_gearchg ad indicare che è in corso una modifica al rapporto master/slave.
gearref
| Breve descrizione | Riferimento rapporto di trasmissione |
|---|---|
| Dimensione | Byte |
| Valore di default | - |
| Tipo di accesso | Read - Write |
| Unità di misura | - |
| Range valido | 0÷1 |
| ID parametro | 3 |
| Condizioni di scrittura | - |
Descrizione:
Indica il riferimento al quale applicare il rapporto di trasmissione master/slave.
-
0: Posizione comandata master
-
1: Posizione reale master
wrncode
| Breve descrizione | Codice di identificazione warning |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | |
| ID parametro | 4 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
wrnpar
| Breve descrizione | ID del parametro che ha provocato il warning. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | |
| ID parametro | 5 |
| Condizioni di scrittura | - |
Descrizione:
Indica quale parametro ha provocato il warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
wrnvalue
| Breve descrizione | Codice di identificazione della causa del warning |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 6 |
| Condizioni di scrittura | - |
Descrizione:
Indica la causa del warning rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errcode
| Breve descrizione | Codice di identificazione dell'errore. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 7 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errpar
| Breve descrizione | ID del parametro che ha provocato l'errore. |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 8 |
| Condizioni di scrittura | - |
Descrizione:
Indica il parametro che ha provocato l'errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
errvalue
| Breve descrizione | Codice di identificazione della causa dell'errore |
|---|---|
| Dimensione | Byte |
| Valore di default | 0 |
| Tipo di accesso | Read |
| Unità di misura | - |
| Range valido | - |
| ID parametro | 9 |
| Condizioni di scrittura | - |
Descrizione:
Indica il tipo di causa dell'errore rilevato dal device. Per ulteriori informazioni consultare il capitolo dedicato.
1.4 Elenco Stati
st_gearon
| Breve descrizione | Stato di sincronismo attivo |
|---|---|
| Valore di default | 0 |
| ID stato | 10 |
Descrizione:
Indica che è attivo il sincronismo master/slave.
* 0 = sincronismo master/slave non attivo * 1 = sincronismo master/slave attivo
st_gearchg
| Breve descrizione | Stato di cambiamento denominatore rapporto master/slave |
|---|---|
| Valore di default | 0 |
| ID stato | 11 |
Descrizione:
Indica che è stato modificato il denominatore del rapporto master slave ma non è ancora attivo.
* 0 = rapporto master/slave corrisponde al rapporto gearnum/gearden * 1 = denominatore rapporto master/slave modificato e non corrispondente a gearnum/gearden
st_warning
| Breve descrizione | Presenza di un warning. |
|---|---|
| Valore di default | 0 |
| ID stato | 12 |
Descrizione:
Indica lo stato di warning del device, per riconoscere il tipo di warning si deve fare riferimento alle variabili wrncode, wrnvalue e wrnpar.
0 = warning non presente.
1 = warning presente.
—
st_error
| Breve descrizione | Presenza di un errore. |
|---|---|
| Valore di default | 0 |
| ID stato | 13 |
Descrizione:
Indica lo stato di errore del device, per riconoscere il tipo di errore si deve far riferimento alle variabili errcode e errvalue.
0 = errore non presente.
1 = errore presente.
1.5 Elenco Comandi
GEARON
| Breve descrizione | Attiva la sincronizzazione |
|---|---|
| Condizione | st_error=0, st_emrg=0 |
| ID comando | 14 |
Descrizione:
Attiva la sincronizzazione tra gli assi con il rapporto master/slave
GEAROFF
| Breve descrizione | Disattiva la sincronizzazione |
|---|---|
| Condizione | st_error=0 |
| ID comando | 14 |
Descrizione:
Disattiva la sincronizzazione tra gli assi con il rapporto master/slave quindi l'asse slave può essere comandato in maniera indipendente dal master.
RSERR
| Breve descrizione | Reset dello stato di errore. |
|---|---|
| Condizione | - |
| ID comando | 15 |
Descrizione:
Azzera lo stato di errore (st_error) nel caso non sia più presente la condizione di errore.
RSWRN
| Breve descrizione | Reset dello stato di warning. |
|---|---|
| Condizione | - |
| ID comando | 16 |
Descrizione:
Azzera lo stato st_warning.
1.6 Errori e Warnings
1.6.1 Errors
Quando il device non riesce ad eseguire le operazioni derivanti da una non corretta programmazione da parte dell'utente segnala questa condizione tramite l'attivazione dello stato st_error. Il device, inoltre, rende disponibili, tramite i valori sui parametri errcode, errvalue ed errpar, alcune informazioni per meglio comprendere il tipo di errore e quale condizione l'ha generato. Tali informazioni e lo stato di errore st_error, permangono finché non viene eseguito l'apposito comando RSERR che li cancella.
La seguente tabella specifica i valori assunti da errcode:
| errcode | Descrizione |
|---|---|
| 0 | Nessun errore. |
| 1 | Errore dati: Sono presenti valori fuori range nei parametri. |
| 2 | Errore di configurazione. |
Per mezzo dei parametri errvalue e errpar è possibile ottenere informazioni più dettagliate riguardo l'errore.
Il parametro errpar indica sempre l'ID del parametro che ha causato l'errore.
Invece attualmente il parametro errvalue non è utilizzato e vale sempre 0.
1.6.2 Warnings
Quando l'impostazione di un parametro del device non viene accettata o quando non è possibile eseguire un comando il device segnala questa condizione tramite l'attivazione dello stato st_warning.
Il device, inoltre, rende disponibili, tramite i valori sui parametri wrncode, wrnvalue e wrnpar, alcune informazioni per meglio comprendere il tipo di warning e quale condizione l'ha generato.
Tali informazioni e lo stato di warning st_warning, permangono finché non viene eseguito l'apposito comando RSWRN che li cancella.
La seguente tabella specifica i valori assunti da wrncode:
| wrncode | Descrizione |
|---|---|
| 0 | Nessun warning. |
| 1 | Impostazione dato fuori range. |
| 2 | Variazione parametro non accettata. |
| 3 | Comando non accettato: le condizioni di esecuzione non sono rispettate. |
Per mezzo dei parametri wrnvalue e wrnpar è possibile ottenere informazioni più dettagliate riguardo il warning.
Il parametro wrnpar indica sempre l'ID del parametro che ha causato il warning.
Il parametro wrnvalue fornisce le seguenti informazioni:
| wrnvalue | descrizione |
|---|---|
| 1 | Il denominatore del rapporto master/slave è zero |
| 2 | Il riferimento dell'asse slave non è valido |
| 3 | Asse slave in emergenza. Attivazione gear non possibile |
documentation under develop