SLOT @slot@ (H1-MHx)
| Pin | Nome | Descrizione | Indirizzo | |
|---|---|---|---|---|
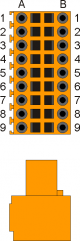 | 1A | +24V | Uscita +24V dc1) | |
| 1B | ||||
| 2A | PHA1 | Fase A del conteggio 1 | X.CNT@ct1@ \ X.INP@i3@ | |
| 3A | PHA2 | Fase A del conteggio 2 | X.CNT@ct2@ \ X.INP@i6@ | |
| 2B | PHB1 | Fase B del conteggio 1 | X.CNT@ct1@ \ X.INP@i4@ | |
| 3B | PHB2 | Fase B del conteggio 2 | X.CNT@ct2@ \ X.INP@i7@ | |
| 4A | PHZ1 | Z del conteggio 1 | X.INP@i5@ | |
| 4B | PHZ2 | Z del conteggio 2 | X.INP@i8@ | |
| 5A | 0V | Comune di ingressi digitali e conteggi | ||
| 5B | ||||
| 6A | NC | Non connesso | ||
| 6B | ||||
| 7A | VM+ | Alimentazione motori (18÷28 dc volts) | ||
| 7B | VM- | |||
| 8A | M1A | Uscite motore 1 | X.AN@an1@ | |
| 8B | M1B | |||
| 9A | M2A | Uscite motore 2 | X.AN@an2@ | |
| 9B | M2B | |||
1)
Utilizzabile per alimentare l'encoder.
Segnali comando motori
| Nome | Descrizione | Tipo | Indirizzo |
|---|---|---|---|
| FLT01 | Fault motore 1 | Ingresso | X.INP@i1@ |
| DIR01 | Direzione motore 1 | Uscita | X.OUT@o1@ |
| MOV01 | Movimento motore 1 | Uscita | X.OUT@o2@ |
| ENA01 | Abilitazione motore 1 | Uscita | X.OUT@o3@ |
| FLT02 | Fault motore 2 | Ingresso | X.INP@i2@ |
| DIR02 | Direzione motore 2 | Uscita | X.OUT@o4@ |
| MOV02 | Movimento motore 2 | Uscita | X.OUT@o5@ |
| ENA02 | Abilitazione motore 2 | Uscita | X.OUT@o6@ |