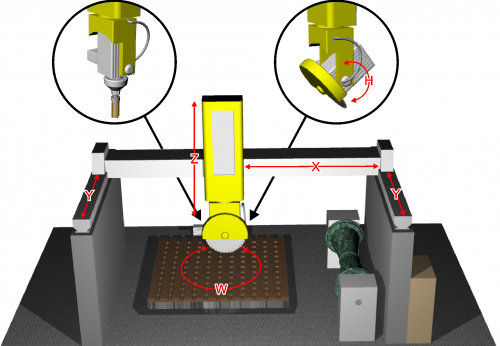
P1P44FA30-001 - Segatrice 4 assi per marmo/granito: Manuale installatore
| Documento | P1P44FA30-001 | ||
|---|---|---|---|
| Descrizione | Manuale installatore | ||
| Elaborazione | |||
| Approvazione | Bozza | ||
| Link: | http://www.qem.eu/doku/doku.php/strumenti/qmoveplus/j1p44/mdu_p1p44fa30-001/funzionamento | ||
| Lingua | Italiano | ||
| Release | Descrizione | Note | Data |
| 01 | Nuovo manuale | 14/06/16 | |
Indice
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta della QEM. QEM non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. QEM non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento. Marchi registrati : * QEM® è un marchio registrato. * Microsoft® e MS-DOS® sono marchi registrati e Windows® è un marchio della Microsoft Corporation.
1. Hardware J1-P44-FA30
1.1 Tasti Funzione e LED
| Tasto | Icona | Funzione | Led | Tasto | Icona | Funzione | Led |
|---|---|---|---|---|---|---|---|
| F1 | - | Reboot | - | F4 | - | Semiautomatico = ON | Semiautomatico attivo |
| F2 | - | Lingua | - | F5 | - | Alarm = ON | Presenza allarme |
| F3 | - | Restart | - | F6 | - | Uscita | - |
| - - - - | - - - - | - - - - | - - - - | - - - - | - - - - | - - - - | - - - - |
1.2 Simboli e tasti
| Buttone | Descrizione | ———————– | Simboli barra superiore | Descrizione |
|---|---|---|---|---|
| | Premere per confermare | | Manuale | |
| | Selezione | | Emergenza | |
 | Pagina precedente | | Automatico | |
 | Pagina successiva | | Modalità taratura | |
 | Area riservata | | Non inizializzato | |
| | Apri file da USB | | Setup Protetto/Sprotetto | |
| | Salva | |||
 | Anteprima lavorazione | |||
 | I dati in giallo sono modificabili | |||
| - - - - | - - - - | - - - - | - - - - | - - - - |
1.3 Startup
| START | | OPPURE  per uscire |
 |
||
| HOMING |  | OPPURE F6 per uscire |
| |
||
| MENU PRINCIPALE |  | |
2. SETUP
F6  | | |||
 |  |
|||
 PASSWORD 462 |  |
|||
 | Parametri di SETUP | ||
 | Calibrazione assi | ||
 | Carica i parametri di default | ||
| | Diagnostica | | Ricerca centro del banco |
| | Sblocca area di setup Disabilita la password fino al riavvio | | Blocca area di setup Accesso solo con password |
 | Imposta data e ora del sistema | ||
| - - - - | - - - - | - - - - | - - - - |
2.1 Carica parametri di default
| F6 | | |||
| | |
|||
| PASSWORD 462 | |
|||
| |
||||
 |
||||
| SI Carica Default | NO Cancella |
|||
3. Parametri di SETUP
| F6 | |
|||
| | |
|||
| PASSWORD462 | |
|||
| |
||||
 |
||||
3.1 Parametri Generici
GEN  | |
| Parametro | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PG-01 : PUNTI DECIMALI X/Y/Z | - | 1 | 0 - 2 | Numero di punti decimali per le posizioni degli assi X, Y e Z Per i pollici le posizioni sono visualizzate con “PUNTI DECIMALI + 1”. |
| PG-02 : PUNTI DECIMALI B | - | 2 | 0 - 2 | Numero di punti decimali per la posizione dell'asse B |
| PG-03 : MAX RPM DISCO | rpm | 2480 | 0 - 3000 | RPM del disco quando viene comandato alla massima velocità. |
| PG-04 : TIMER LASER | s | 30 | 0 - 9999 | E' il tempo di accensione del laser quando viene attivato con il tasto touch o l'ingresso dedicato. |
| PG-05 : TIMER FLUSSOSTATO 1 | s | 5 | 0 - 9999 | In caso di mancanza acqua, se il ciclo automatico è attivo, dopo questo tempo si passa in uno stato di stand-by di attesa ripristino pressione. In manuale si passa nello stato di allarme. |
| PG-06 : TIMER FLUSSOSTATO 2 | s | 60 | 0 - 9999 | Se la macchina è in stand-by ripristino pressione, dopo questo tempo si passa nello stato di allarme. |
| PG-07 : TIMER PRESSOSTATO | s | 5 | 0 - 9999 | In caso di mancanza aria, dopo questo tempo si passa nello stato di allarme. |
| PG-08 : BUZZER HMI | - | 0 | 0 - 1 | 0: buzzer abilitato 1: buzzer disabilitato. |
| PG-09 : TIMER SIRENA | s | 10 | 0 - 999 | Durata della segnalazione di allarme. |
| PG-10 : UNITA' DI MISURA | - | 0 | 0 - 1 | 0: mm 1: pollici Tutti i parametri di setup sono espressi in mm. |
| PG-11 : MODO HOMING | - | 1 | 0 - 2 | 0: Homing necessario per abilitare tutte le altre operazioni; 1: Homing non necessario, tutte le funzioni sono abilitate; 2: Homing necessario per abilitare il ciclo automatico, altrimenti sono abilitati solo i movimenti in manuale. |
| PG-12 : Non utilizzato | ||||
| PG-13 : MINIMO VALORE DEGLI INGRESSI ANALOGICI | bit | 5 | 0 - 1000 | Sotto tale valore gli ingressi analogici sono forzati a 0. |
| PG-14 : Non utilizzato | ||||
| PG-15 : CORNER TYPE | - | 0 | 0 - 1 | 0: angolo in interpolazione con smusso centrale 1: Non utilizzato |
| PG-16 : CORNER ERROR | mm | 0.5 | 0 - 999.9 | Massimo errore di misura tra il punto di partenza dell'angolo e il centro. |
| PG-17 : VELOCITA' RAPIDA | mm/min | 1000 | 0 - 9999 | Velocità di interpolazione per i tratti a velocità rapida (straight traverse). |
| PG-18 : MASSIMA CORRENTE | A | 100.0 | 0 - 999.9 | Massimo assorbimento del disco quando l'ingresso analogico è a fondo scala. |
| PG-19 : Non utilizzato | ||||
| PG-20 : MAX RPM FRESA | rpm | 3000 | 0 - 6000 | RPM della fresa quando viene comandata alla massima velocità. |
| PG-21 : SEQUENZA DI HOMING | - | 0 | 0 - 1 | 0: homing di un asse alla volta; 1: dopo l'homing dell'asse Z, X e Y partono contemporaneamente. Per ultimi gli assi B e I. |
| PG-22 : OTTIMIZZAZIONE TAGLI | - | 1 | 0 - 1 | 0: tagli 2D eseguiti in sequenza; 1: tagli 2D ottimizzati in base alla rotazione del banco. |
| PG-23 : MODO POSIZIONAMENTO ASSI | - | 0 | 0 - 1 | 0: non retroazionato; 1: retroazionato. |
| PG-24 : TIMER FINE CICLO | min | 20 | 0 - 9999 | Parte alla fine di un ciclo automatico. Scaduto questo timer, cadono gli ausiliari. |
| PG-25 : TIMER ATTIVAZIONE AUSILIARI | s | 20 | 0 - 9999 | Timer di attesa attivazione degli ausiliari all'accensione della macchina. |
| PG-26 : TIMER CAMBIO VELOCITA' DISCO | s | 3 | 0 - 9999 | Timer di attesa tra un incremento/decremento e l'altro in caso di cambio velocità di rotazione del disco. |
| PG-27 : TIMER ASSORBIMENTO CORRENTE | s | 10 | 0 - 9999 | In caso di superamento della soglia di corrente, dopo questo tempo si passa nello stato di allarme. |
| PG-28 : ABILITA TAGLI MULTIPLI | - | 1 | 0 - 1 | 0: lavorazione tagli multipli non abilitata; 1: lavorazione tagli multipli abilitata. |
| PG-29 : ABILITA SPIANATURA | - | 1 | 0 - 1 | 0: lavorazione spianatura non abilitata; 1: lavorazione spianatura abilitata. |
| PG-30 : ABILITA PROFILATURA | - | 0 | 0 - 1 | 0: lavorazione profilatura non abilitata; 1: lavorazione profilatura abilitata. |
| PG-31 : ABILITA FINITURA | - | 0 | 0 - 1 | 0: lavorazione finitura non abilitata; 1: lavorazione finitura abilitata. |
3.2 Setup asse X
 | |
| Parametri | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PX-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PX-02. |
| PX-02 : PULSE | - | 1 | 0 - 999999 | Impulsi encoder per muovere l'asse della distanza impostata in PX-01. PX-01/PX-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
| PX-03 : ENCODER | - | 0 | 0 - 1 | 0: asse X con encoder 1: asse X senza encoder |
| PX-04 : TOLLERANZA | mm | 0.50 | 0 - 999.99 | Massimo scostamento tra la posizone attuale e la posizione target. Se l'asse si ferma all'interno di questa finestra, il posizionamento è considerato corretto. |
| PX-05 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa tra l'abilitazione dell'asse e lo start al movimento. |
| PX-06 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa dopo la fermata dell'asse. |
| PX-07 : RALLENTAMENTO | mm | 50.0 | 0 - 99999.9 | Spazio prima della posizione target dove entra la velocità di lento. |
| PX-08 : INERZIA AVANTI | mm | 0 | 0 - 999.99 | Spazio di inerzia alla fine del movimento avanti. |
| PX-09 : INERZIA INDIETRO | mm | 0 | 0 - 999.99 | Spazio di inerzia alla fine del movimento indietro. |
| PX-10 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
| PX-11 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo tra la fermata dell'asse e il controllo della tolleranza. |
| PX-12 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
| PX-13 : OLTREQUOTA | mm | 0 | 0 - 9999.9 | Oltrequota per il recupero giochi. |
| PX-14 : VELOCITA' MASSIMA | m/min | 15.0 | 5.0 - 20.0 | Massima velocità dell'asse. |
| PX-15 : VELOCITA' MINIMA | m/min | 0.1 | 1.0 - 10.0 | Minima velocità dell'asse quando i potenziometri sono sotto la soglia minima. |
| PX-16 : VELOCITA' RAPIDA IN AUTOMATICO | m/min | 10.0 | 0 - 20.0 | Velocità rapida dell'asse durante il ciclo automatico. |
| PX-17 : VELOCITA' LENTA IN AUTOMATICO | m/min | 5.0 | 0 - 20.0 | Velocità lenta dell'asse durante il ciclo automatico. |
| PX-18 : VELOCITA' RAPIDA IN MANUALE | m/min | 10.0 | 0 - 20.0 | Velocità rapida dell'asse durante il jog. |
| PX-19 : VELOCITA' LENTA IN MANUALE | m/min | 5.0 | 0 - 20.0 | Velocità lenta dell'asse durante il jog. |
| PX-20 : VELOCITA' RAPIDA IN HOMING | m/min | 10.0 | 0 - 20.0 | Velocità rapida dell'asse durante la ricerca di homing. |
| PX-21 : VELOCITA' LENTA IN HOMING | m/min | 1.0 | 0 - 20.0 | Velocità lenta dell'asse dopo l'inversione in homing. |
| PX-22 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
| PX-23 : OFFSET HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione forzata alla fine della procedura di homing. |
| PX-24 : TIPO HOMING | - | 0 | 0 - 3 | 0: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PX-23 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PX-23 sul segnale di zero encoder 2: L'asse esegue l'homing senza muoversi. Carica la quota PX-23 al segnale del sensore di homing 3: Homing disabilitato. |
| PX-25 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0:avanti 1:indietro |
| PX-26 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Massima quota raggiungibile dall'asse. Finecorsa software. |
| PX-27 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Minima quota raggiungibile dall'asse. Finecorsa software. |
| PX-28 : MINIMO SPOSTAMENTO | mm | 0.10 | 0 - 999.9 | Controllo rottura encoder: minimo spostamento eseguito dall'asse. |
| PX-29 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Controllo rottura encoder: tempodi controllo del minimo spostamento PX-27. |
| PX-30 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
| PX-31 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa rilascio freno prima dello start movimento e chiusura dopo lo stop. |
| PX-32 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. |
| PX-33 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. |
| Modalità posizionamento ad impulsi |
||||
| PX-34 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
| PX-35 : QUOTA DI AVVICINAMENTO | mm | 0.30 | 0 - 9999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. |
| PX-36 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. |
| PX-37 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. |
| PX-38 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. |
| PX-39 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. |
| Varie |
||||
| PX-40 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
| PX-41 : TIPO RALLENTAMENTO | - | 0 | 0 - 2 | Calcolo del rallentamento: 0: fisso con parametro PX-06 1: proporzionale alla velocità rilevata 2: proporzionale al quadrato della velocità rilevata |
| PX-42 : RALLENTAMENTO MASSIMO | mm | 0 | 0 - 9999.9 | Massimo rallentamento alla massima velocità PX-13. |
| PX-43 : RALLENTAMENTO MINIMO | mm | 0 | 0 - 9999.9 | Minimo rallentamento che può essere utilizzato. |
| PX-44 : TEMPO INVERSIONE | s | 0.50 | 0 - 99.99 | Ritardo durante l'inversione del movimento. |
3.3 Setup assi Y , Z
| Y SETUP  Z SETUP  | |
| Parametri | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PY-01 : MEASURE | mm | 0.1 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PY-02. |
| PY-02 : PULSE | - | 1 | 0 - 9999999 | Impulsi encoder per muovere l'asse della distanza impostata in PY-01. PY-01/PY-02 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
| PY-03 : TOLLERANZA | mm | 0.50 | 0 - 99.99 | Massimo scostamento tra la posizone attuale e la posizione target. Se l'asse si ferma all'interno di questa finestra, il posizionamento è considerato corretto. |
| PY-04 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa tra l'abilitazione dell'asse e lo start al movimento. |
| PY-05 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa dopo la fermata dell'asse. |
| PY-06 : USCITA ABILITAZIONE ASSi | - | 0 | 0 - 1 | Modo abilitazione assi. 0: uscita ON primadel movimento assi e OFF dopo lo stop timer regolati da PY-04 e PY-05. 1: uscita sempre ON se la macchina non è in emergenza. |
| PY-07 : RETROAZIONE JOG | - | 1 | 0 - 1 | Tipo funzionamento jog. 0: Durante il jog, assi in anello aperto 1: Durante il jog, assi in anello chiuso |
| PY-08 : MASSIMA POSIZIONE | mm | 99999.9 | -99999.9 - 99999.9 | Massima quota raggiungibile dall'asse. Finecorsa software. |
| PY-09 : MINIMA POSIZIONE | mm | -99999.9 | -99999.9 - 99999.9 | Minima quota raggiungibile dall'asse. Finecorsa software. |
| PY-10 : OFFSET HOMING | mm | 0 | -99999.9 - 99999.9 | Posizione forzata alla fine della procedura di homing. |
| PY-11 : TIPO HOMING | - | 0 | 0 - 3 | 0: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PY-10 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PY-10 sul segnale di zero encoder 2: L'asse esegue l'homing senza muoversi. Carica la quota PY-10 al segnale del sensore di homing 3: Homing disabilitato. |
| PY-12 : DIREZIONE HOMING | - | 1(Y)/0(Z) | 0 - 1 | 0:avanti 1:indietro |
| PY-13 : VELOCITA' RAPIDA IN HOMING | mm/min | 10 | 0 - 9999999 | Velocità rapida dell'asse durante la ricerca di homing. |
| PY-14 : VELOCITA' LENTA IN HOMING | mm/min | 10 | 0 - 9999999 | Velocità lenta dell'asse dopo l'inversione in homing. |
| PY-15 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
| PY-16 : TEMPO ACCELERAZIONE IN AUTOMATICO | s | 1.00 | 0 - 9.99 | Tempo per passare da 0 alla velocità massima in automatico. |
| PY-17 : TEMPO DECELERAZIONE IN AUTOMATICO | s | 1.00 | 0 - 9.99 | Tempo per passare dalla velocità massima a 0 in automatico. |
| PY-18 : TEMPO ACCELERAZIONE IN MANUALE | s | 1.00 | 0 - 9.99 | Tempo per passare da 0 alla velocità massima in jog |
| PY-19 : TEMPO DECELERAZIONE IN MANUALE | s | 1.00 | 0 - 9.99 | Tempo per passare dalla velocità massima a 0 in jog |
| PY-20 : TIMER ATTESA TOLLERANZA | s | 0.050 | 0 - 9.999 | Tempo tra la fermata dell'asse e il controllo della tolleranza. |
| PY-21 : VELOCITA' AVANTI IN AUTOMATICO | mm/min | 10 | 0 - 9999999 | Velocità “ avanti ” il ciclo automatico. |
| PY-22 : VELOCITA' INDIETRO IN AUTOMATICO | mm/min | 10 | 0 - 9999999 | Velocità “ indietro ” in ciclo automatico. |
| PY-23 : VELOCITA' RAPIDA IN MANUALE | mm/min | 10 | 0 - 9999999 | Velocita “ avanti ” in jog |
| PY-24 : VELOCITA' LENTA IN MANUALE | mm/min | 10 | 0 - 9999999 | Velocità “ lenta” in jog |
| PY-25 : MINIMO SPOSTAMENTO | mm | 0.1 | 0 - 999.9 | Delta spazio sotto il quale viene generato l'allarme “ rottura encoder ” |
| PY-26 : SOGLIA DI TENSIONE | V | 1.0 | 0 - 10.0 | Tensione oltre la quale viene abilitato il controllo dell'encoder |
| PY-27 : PARCHEGGIO FINE CICLO | - | 0 | 0 - 1 | Abilita la posizione di parcheggio a fine ciclo automatico: 0: disabilitata 1: abilitata |
| PY-28 : MASSIMA VELOCITA' | mm/min | 100 | 0 - 9999999 | Massima velocità dell'asse con comando di 10Vdc. |
| PY-29 : FEEDFORWARD | % | 100.0 | 0 - 200.0 | Valore della % feedforward (vedi PID ) |
| PY-30 : GUADAGNO PROPORZIONALE AUTO | - | 0 | 0 - 9.999 | Valore del guadagno proporzionale ( vedi PID) |
| PY-31 : GUADAGNO PROPORZIONALE JOG | - | 0 | 0 - 9.999 | Registro proporzionale per la regolazione PID in jog e interpolazione. |
| PY-32 : TEMPO INTEGRALE | s | 0 | 0 - 9.999 | Registro integrale per la regolazione PID. |
| PY-33 : TEMPO DERIVATIVO | s | 0 | 0 - 9.999 | Registro derivativo per la regolazione PID. |
| PY-34 : MASSIMO ERRORE DI INSEGUIMENTO | mm | 9999.99 | 0 - 9999.99 | Massimo scostamento tra la posizione ideale e quella reale dell'asse. |
| PY-35 : MASSIMO ERRORE DI INSEGUIMENTO INTERPOLAZIONE | mm | 9999.99 | 0 - 9999.99 | Massimo scostamento tra la posizione ideale e quella reale dell'asse durante l'interpolazione Y-Z. |
| PY-36 : OFFSET | V | 0 | -99.9999 - 99.9999 | Offset dell'uscita analogica per la compensazione della deriva. |
| PY-37 : MASSIMA VELOCITA' INTERPOLAZIONE | % | 80.0 | 0 - 100.0 | Massima velocità di interpolazione. Percentuale della massima velocità PY-28. |
| PY-38 : LOGICA SENSORE HOMING | - | 0 | 0 - 1 | 0: Sensore NO (normalmente aperto) 1: Sensore NC (normalmente chiuso) |
| Modalità posizionamento ad impulsi |
||||
| PY-39 : QUOTA DI AVVICINAMENTO | mm | 0 | 0 - 999.9 | Delta spazio in anticipo sul Set , entro il quale il posizionamento viene fatto con gli impulsi |
| PY-40 : AMPIEZZA IMPULSO | V | 0.01 | 0 - 10.00 | Ampiezza impulso in volt. |
| PY-41 : DURATA IMPULSO | s | 0.20 | 0 - 9.99 | Durata di un singolo impulso di tensione. |
| PY-42 : INTERVALLO IMPULSI | s | 0.20 | 0 - 9.99 | Tempo tra due impulsi. |
| PY-43 : TIMEOUT IMPULSI | s | 10 | 0 - 99 | Massimo tempo per il posizionamento. |
| PY-44 : QUOTA DI AVVICINAMENTO 2 | mm | 0 | 0 - 999.9 | Delta spazio in anticipo sul Set , entro il quale il posizionamento viene fatto con gli impulsi di ampieza maggiore. L'ampiezza è il parametro PY-40 moltiplicato per il parametro PY-45. |
| PY-45 : MOLIPLICATORE IMPULSI | - | 1 | 0 - 9.9 | Valore di moltiplicazione dell'ampiezza dell'impulso quando l'asse si trova tra il parametro PY-39 e il PY-44 |
| Parametri utilizzati solo per l'asse Y |
||||
| PY-46 : Non utilizzato | ||||
| PY-47 : DISABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: allarme abilitato 1: fuori tolleranza solo visualizzato |
| PY-48 : Non utilizzato | ||||
| PY-49 : TIPO RAMPA | - | 0 | 0 - 1 | 0: rampe lineari 1: rampe ad “ S ” |
| PY-50 : SPAZIO STOP IN RAPIDO | mm | 0 | 0 - 9999.9 | Spazio prima del finecorsa software dove l'asse viene fermato se i jog sono senza retroazione. |
| PY-51 : SPAZIO STOP IN LENTO | mm | 0 | 0 - 9999.9 | Spazio prima del finecorsa software dove l'asse viene fermato se i jog sono senza retroazione. |
| PY-52 : ABILITAZIONE PY-51 | mm | 0 | 0 | Se posto a “1 ” viene abilitato il parametro 51 |
| PY-53 : SPAZIO RAMPE AUMENTATE | mm | 0 | 0 - 9999.9 | Delta spazio dal Set entro il quale le rampe di accelerazione e decelerazione vengono triplicate |
| Parametri utilizzati solo per l'asse Z |
||||
| PZ-46 : DISABILITA ALLARME TOLLERANZA | - | 0 | 0 - 1 | 0: allarme abilitato 1: fuori tolleranza solo visualizzato |
| PZ-47 : TIPO RAMPA | - | 0 | 0 - 1 | 0: rampe lineari 1: rampe epicicloidali |
| PZ-48 : SPAZIO STOP IN RAPIDO | mm | 0 | 0 - 9999.9 | Spazio prima del finecorsa software dove l'asse viene fermato se i jog sono senza retroazione. |
| PZ-49 : SPAZIO STOP IN LENTO | mm | 0 | 0 - 9999.9 | Spazio prima del finecorsa software dove l'asse viene fermato se i jog sono senza retroazione. |
| PZ-50 : ABILITAZIONE PZ-49 | mm | 0 | 0 | Se posto a “1 ” viene abilitato il parametro 49 |
| PZ-51 : SPAZIO RAMPE AUMENTATE | mm | 0 | 0 - 9999.9 | Delta spazio dal Set entro il quale le rampe di accelerazione e decelerazione vengono triplicate |
| PZ-52 : TIPO ASSE | - | 0 | 0 - 1 | 0: asse con encoder 1: movimenti con timer |
3.4 Setup asse B
 | |
| Parametri | U.M. | Default | Range | Descrizione |
|---|---|---|---|---|
| PW-01 : ABILITAZIONE ASSE | - | 0 | 0 - 2 | 0: asse disabilitato 1: asse con solo encoder 2: asse con encoder e motore |
| PW-02 : MEASURE | ° | 0.01 | 0 - 99999.9 | Distanza, in unità di misura, percorsa dell'asse per ottenere gli impulsi impostati in PW-03. |
| PW-03 : PULSE | - | 1 | 0 - 9999999 | Impulsi encoder per muovere l'asse della distanza impostata in PW-02. PW-02/PW-03 è la risoluzione dell'asse. Deve essere compresa tra 1 ~ 0.000935. |
| PW-04 : TOLLERANZA | ° | 0.050 | 0 - 99.999 | Massimo scostamento tra la posizone attuale e la posizione target. Se l'asse si ferma all'interno di questa finestra, il posizionamento è considerato corretto. |
| PW-05 : TIMER ABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa tra l'abilitazione dell'asse e lo start al movimento. |
| PW-06 : TIMER DISABILITAZIONE | s | 0.200 | 0 - 9.999 | Tempo di attesa dopo la fermata dell'asse. |
| PW-07 : RALLENTAMENTO | ° | 5.00 | 0 - 9999.99 | Spazio prima della posizione target dove entra la velocità di lento. |
| PW-08 : INERZIA AVANTI | ° | 0 | 0 - 99.999 | Spazio di inerzia alla fine del movimento avanti. |
| PW-09 : INERZIA INDIETRO | ° | 0 | 0 - 99.999 | Spazio di inerzia alla fine del movimento indietro. |
| PW-10 : MODO INERZIA | - | 0 | 0 - 2 | Alla fine del posizionamento: 0: inerzia non ricalcolata 1: ricalcolo se l'asse finisce fuori tolleranza 2: ricalcolo sempre eseguito |
| PW-11 : TIMER ATTESA TOLLERANZA | s | 1.000 | 0 - 9.999 | Tempo tra la fermata dell'asse e il controllo della tolleranza. |
| PW-12 : RECUPERO GIOCHI | - | 0 | 0 - 4 | 0: disabilitato 1: recupero avanti 2: recupero indietro 3: recupero avanti sempre in rapido 4: recupero indietro sempre in rapido |
| PW-13 : OLTREQUOTA | ° | 0 | 0 - 999.99 | Oltrequota per il recupero giochi. |
| PW-14 : VELOCITA' RAPIDA IN AUTOMATICO | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante il ciclo automatico. |
| PW-15 : VELOCITA' LENTA IN AUTOMATICO | % | 5.0 | 0 - 100.0 | Velocità lenta dell'asse durante il ciclo automatico. |
| PW-16 : VELOCITA' RAPIDA IN MANUALE | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante il jog. |
| PW-17 : VELOCITA' LENTA IN MANUALE | % | 5.0 | 0 - 100.0 | Velocità lenta dell'asse durante il jog. |
| PW-18 : VELOCITA' RAPIDA IN HOMING | % | 10.0 | 0 - 100.0 | Velocità rapida dell'asse durante la ricerca di homing. |
| PW-19 : VELOCITA' LENTA IN HOMING | % | 1.0 | 0 - 100.0 | Velocità lenta dell'asse dopo l'inversione in homing. |
| PW-20 : SEQUENZA HOMING | - | 1 | 0 - 1 | 0: L'asse non è incluso automaticamente nella sequenza di homing 1: L'asse è incluso automaticamente nella sequenza di homing |
| PW-21 : OFFSET HOMING | ° | 0 | -9999.99 - 9999.99 | Posizione forzata alla fine della procedura di homing. |
| PW-22 : TIPO HOMING | - | 0 | 0 - 3 | 0: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PW-21 1: L'asse impegna il sensore di homing, inverte il movimento e carica la posizione PW-21 sul segnale di zero encoder 2: L'asse esegue l'homing senza muoversi. Carica la quota PW-21 al segnale del sensore di homing 3: Homing disabilitato. |
| PW-23 : DIREZIONE HOMING | - | 1 | 0 - 1 | 0:avanti 1:indietro |
| PW-24 : MASSIMA POSIZIONE | ° | 9999.99 | -9999.99 - 9999.99 | Massima quota raggiungibile dall'asse. Finecorsa software. |
| PW-25 : MINIMA POSIZIONE | ° | -9999.99 | -9999.99 - 9999.99 | Minima quota raggiungibile dall'asse. Finecorsa software. |
| PW-26 : MINIMO SPOSTAMENTO | ° | 0.10 | 0 - 99.99 | Controllo rottura encoder: minimo spostamento eseguito dall'asse. |
| PW-27 : TEMPO MINIMO | s | 2.000 | 0 - 9.999 | Controllo rottura encoder: tempodi controllo del minimo spostamento PW-26. |
| PW-28 : LOGICA FRENO | - | 1 | 0 - 1 | 0: Uscita freno N.O. 1: Uscita freno N.C. |
| PW-29 : TEMPO FRENO | s | 1.000 | 0 - 9.999 | Tempo di attesa rilascio freno prima dello start movimento e chiusura dopo lo stop. |
| PW-30 : ACCELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di accelerazione. |
| PW-31 : DECELERAZIONE | V/s | 20.00 | 0 - 99.99 | Valore di decelerazione. |
| Modalità posizionamento ad impulsi |
||||
| PW-32 : ABILITAZIONE IMPULSI | - | 0 | 0 - 1 | 0: Posizionamento ad impulsi disabilitato 1: Posizionamento ad impulsi abilitato |
| PW-33 : QUOTA DI AVVICINAMENTO | ° | 0.30 | 0 - 999.99 | Spazio prima della quota target dove inizia il ciclo ad impulsi. |
| PW-34 : DURATA IMPULSO | s | 0.100 | 0 - 9.999 | Durata di un singolo impulso di tensione. |
| PW-35 : INTERVALLO IMPULSI | s | 0.100 | 0 - 9.999 | Tempo tra due impulsi. |
| PW-36 : NUMERO IMPULSI | - | 40 | 0 - 9999 | Massimo numero di impulsi. |
| PW-37 : AMPIEZZA IMPULSO | V | 0.1 | 0 - 10.0 | Ampiezza impulso in volt. |
| Inserzione dei blocchi |
||||
| PW-38 : ABILITAZIONE BLOCCO | - | 0 | 0 - 1 | 0: blocco disabilitato 1: blocco abilitato |
| PW-39 : RITARDO BLOCCO | s | 0.200 | 0 - 9.999 | Tempo tra la fermata asse e l'attivazione uscita blocco. |
| PW-40 : POSIZIONE DEL BLOCCO | ° | 0 | -9999.99 - 9999.99 | Posizione di intervento del blocco. Il blocco interviene anche ogni multiplo di questa posizione. |
| PW-41 : Non utilizzato | ||||
| Linearizzazione |
||||
| PW-42 : ABILITA CONVERSIONE | - | 0 | 0 - 1 | 0: conversione lineare della posizione disabilitata 1: conversione lineare della posizione abilitata |
| PW-43 : POSIZIONE REALE 2 | ° | 45.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 2. |
| PW-44 : POSIZIONE CONVERTITA 2 | ° | 45.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 2. |
| PW-45 : POSIZIONE REALE 3 | ° | 90.00 | 0 - 9999.99 | Posizione reale dell'asse nel setotre 3. |
| PW-46 : POSIZIONE CONVERTITA 3 | ° | 90.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 3. |
| PW-47 : POSIZIONE REALE 4 | ° | 135.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 4. |
| PW-48 : POSIZIONE CONVERTITA 4 | ° | 135.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 4. |
| PW-49 : POSIZIONE REALE 5 | ° | 180.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 5. |
| PW-50 : POSIZIONE CONVERTITA 5 | ° | 180.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 5. |
| PW-51 : POSIZIONE REALE 6 | ° | 225.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 6. |
| PW-52 : POSIZIONE CONVERTITA 6 | ° | 225.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 6. |
| PW-53 : POSIZIONE REALE 7 | ° | 270.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 7. |
| PW-54 : POSIZIONE CONVERTITA 7 | ° | 270.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 7. |
| PW-55 : POSIZIONE REALE 8 | ° | 315.00 | 0 - 9999.99 | Posizione reale dell'asse nel settore 8. |
| PW-56 : POSIZIONE CONVERTITA 8 | ° | 315.00 | 0 - 9999.99 | Posizione convertita dell'asse nel settore 8. |
4. Diagnostica
| F6 | |
||||
| | |
||||
| PASSWORD:462 | |
||||
 | I/O |  |
|||
INGRESSI  | USCITE  |
||||
CONTEGGI  | USCITE ANALOGICHE  |
||||
INGRESSI ANALOGICI  | |||||
4.1 CPU DATA
 | Fw name : codice firmware e relativo checksum Task time : tempo medio del ciclo CPU Maximum Time e Minimum Time limiti registrati CPU time : tempo totale della CPU nello stato di RUN (hh:mm) |
4.2 Ingressi digitali
| INGRESSI  | | Stato degli ingressi digitali |
| Pagina precedente | |
| Pagina successiva |
4.3 Uscite digitali
| USCITE | | Stato delle uscite digitali |
| Pagina precedente | |
| Pagina successiva | |
 | Premere per passare alla modalità di forzatura uscite Premere sull'uscita che si intende attivare. |
4.4 Conteggi encoder
| CONTEGGI | | Posizione assi  Stato dei canali encoder  FOLLERR: = Errore di inseguimento istantaneo MAX: POS:/NEG: = min - max errore di inseguimento |
|
4.5 Uscite analogiche
| USCITE AN. | | Voltaggio uscite analogiche |
4.6 Ingressi analogici
| INGRESSI AN. | | Lettura ingressi analogici |
5. Calibrazione assi
| F6 | |
|||
| | |
|||
| PASSWORD:462 | |
|||
 |
||||
 |
||||
| RISOLUZIONE |  |
|||
| P.I.D. |  |
|||
| LINEARIZZAZIONE |  |
|||
5.1 Risoluzione
 →
→ 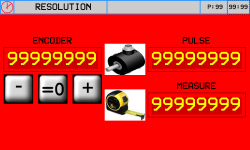
-
Premere il tasto
 (Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti
(Out analogica +1 Volt), controllare che il valore del campo ENCODER aumenti -
Premere il tasto
 (Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca
(Out analogica -1 Volt), controllare che il valore del campo ENCODER diminuisca -
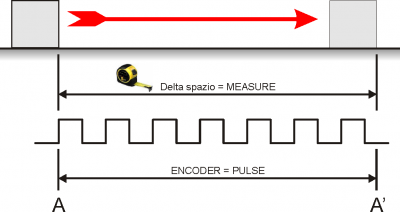
A - A' = Spazio più lungo possibile
-
Segnare la posizione di partenza (A)
-
Azzerare il valore ENCODER:

-
Eseguire il movimento da A ad A'
-
Trascrivere nel campo PULSE, il valore visualizzato nel campo ENCODER
-
Misurare il delta spazio A - A'
-
Scrivere il valore di delta spazio A - A' nel campo MEASURE
Importante:
-
Il valore di PULSE dovrà sempre essere superiore al valore di MEASURE (il valore ottimale è “MEASURE x 10 = PULSE”)
-
Introdurre il valore MEASURE nell'unità di misura scelta. Esempio: se l'unità di misura scelta è 1/10mm e la misura di delta spazio è 133.5mm, introdurre il valore 1335 nel campo MEASURE
-
I valori di Pulse e Misure qui inseriti , verranno trascritti automaticamente nei parametri GP-XX
5.2 P.I.D.
| P.I.D. | |
Procedura per la calibrazione PI + FF:
Il feedback di spazio corregge la posizione dell'asse in base all'errore di inseguimento istantaneo.
I campi numerici in giallo possono essere modificati durante la calibrazione.
I campi numerici in verde sono impostabili e usati durante la taratura.
I campi numerici in blu sono in sola lettura.
| Nome parametro | Unità di misura | Default | Range | Descrizione |
|---|---|---|---|---|
| OUT TENSIONE | V | 0.0 | -10.0 – 10.0 | Uscita in tensione, con risoluzione 0.1 V, fornita direttamentre al drive. |
| OFFSET | V | 0.0000 | -99.9999 – 99.9999 | Offset di tensione, aggiunto all'uscita analogica, per compensare la deriva del drive. |
| VELOCITA' | mm/min | - | - | Velocità attuale dell'asse. |
| MAX VELOCITA' | mm/' | 1000 | 0 – 9999999 | Velocità dell'asse quando la tensione analogica è 10 V. |
| POSIZIONE | mm | - | - | Posizione attuale assoluta dell'asse. |
| DELTA | mm | 0.0 | - | Delta di spazio eseguito durante la taratura. |
| SET SPEED | mm/' | 0 | - | Velocità dell'asse durante la taratura. |
| TEMPO ACC. | s | 1.00 | - | Tempo di accelerazione durante la taratura. |
| TEMPO DEC. | s | 1.00 | - | Tempo di decelerazione durante la taratura. |
| FEEDFORWARD | % | 100.0 | 0.0 – 200.0 | Coefficiente percentuale che, moltiplicato per la velocita, genera la parte FF dell'uscita di regolazione. |
| PROP. GAIN | - | 0.010 | 0.000 – 9.999 | Coefficiente che, moltiplicato per l'errore di inseguimento, genera la parte P dell'uscita di regolazione. |
| T INTEGRAL | s | 0.000 | 0.000 – 9.999 | E' il tempo che produce il coefficiente di integrazione dell'errore di inseguimento, che genera la parte I dell'uscita di regolazione. |
| MAX ERR. INSEG. | mm | 9999.99 | 0.0 – 9999.99 | Massimo scostamento consentito tra la posizione ideale e quella attuale dell'asse. |
| ERRORE INSEG. | mm | - | - | Errore di inseguimento attuale. |
| APPROCCIO | mm | 0 | 0 - 999.9 | Spazio prima della quota target dove inizia il ciclo ad impulsi. Se il valore è >0 la funzione è abilitata. |
| PULSE AMP. | V | 0.01 | 0 - 10.00 | Ampiezza impulso in volt. |
| PULSE TIME | s | 0.20 | 0 - 9.99 | Durata di un singolo impulso di tensione. |
| PULSE PAUSE | s | 0.20 | 0 - 9.99 | Tempo tra due impulsi. |
| TIMEOUT | s | 10 | 0 - 99 | Massimo tempo per il posizionamento. |
Prima di procedere con la calibrazione occorre assicurarsi di aver fatto le seguenti impostazioni:
-
RISOLUZIONE: impostare la risoluzione.
-
MASSIMA POSITIONE: inserire un numero molto alto (e.g. 99999.9 mm)
-
MINIMA POSIZIONE: inserire un numero molto basso (e.g. - 99999.9 mm)
IMPORTANTE! Condizioni obbligatorie per tutte le procedure:
 Assicurarsi che il fungo di emergenza tagli la potenza dei motori, così che la macchina possa essere posta in una condizione di sicurezza.
Assicurarsi che il fungo di emergenza tagli la potenza dei motori, così che la macchina possa essere posta in una condizione di sicurezza.
Tutte le condizioni di allarme devono essere risolte.
Procedure
| OFFSET | |
|---|---|
| 1 |  per abilitare lo stato di calibrazione per abilitare lo stato di calibrazione |
| 2 | Impostare OUT TENSIONE = 0 |
| 3 | Regolare l'OFFSET (direttamente con |
| 4 |  per disabilitare lo stato di calibrazione per disabilitare lo stato di calibrazione |
| Direzione di rotazione e conteggio | |
|---|---|
| Tensione analogica di comando > 0 POSIZIONE deve incrementare | |
| 1 | per abilitare lo stato di calibrazione |
| 2 | Inserire OUT TENSIONE = 1.0 |
| 3 | Assicurarsi che POSIZIONE si incrementi |
| 4 | per disabilitare lo stato di calibrazione. Controllare che OUT TENSIONE vada a 0 immediatamente |
| 5 | Se il motore non si muove nella corretta direzione, cambiare il cablaggio oppure i parametri del drive |
| Velocità massima | |
|---|---|
| Impostare la massima velocità dell'asse (uscita analogica 10V) | |
| 1 | per abilitare lo stato di calibrazione |
| 2 | Inserire OUT TENSIONE > 1.0 (più vicina ai 10V possibile) |
| 3 | Leggere il valore di VELOCITA |
| 4 | Calcolare il valore di MAX VELOCITA: MAX VELOCITA = (10 x VELOCITA) / OUT TENSIONE |
| 5 | per disabilitare lo stato di calibrazione. Controllare che OUT TENSIONE vada a 0 immediatamente |
| 6 | Inserire il risultato del calcolo in MAX VELOCITA |
| Feedback di spazio | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Importante: prima di procedere, completare le procedure precedenti | ||||||||||||||
| 1 | Inserire FEEDFORWARD = 100.0 | |||||||||||||
| 2 | Inserire PROP. GAIN = minimo valore (0.001) | |||||||||||||
| 3 | Se ERRORE INSEG. non è 0, ora questo valore dovrebbe ridursi con un movimento dell'asse | |||||||||||||
| 4 | Inserire DELTA = una misura che l'asse può eseguire e SET VELOCITA = una valore vicino a MAX VELOCITA | |||||||||||||
| 5 |  per abilitare lo stato di taratura e far partire l'asse per abilitare lo stato di taratura e far partire l'asse |
|||||||||||||
| 6 | L'asse si muove verso avanti di una quota DELTA con una velocità SET VELOCITA | |||||||||||||
| 7 | L'asse quindi attende un tempo e inverte il movimento fino alla posizione di partenza. Il ciclo si ripete | |||||||||||||
| 8 | Durante il movimento porre attenzione a ERRORE INSEG. e modificare FEEDFORWARD e PROP. GAIN per ridurlo il più possibile. Regole
|
|||||||||||||
| 9 | Quando l'asse oltrepassa il valore MAX ERR. INSEG. apparirà il simbolo di attenzione |
|||||||||||||
| 10 |  per terminare la procedura per terminare la procedura |
|||||||||||||
5.3 Linearizzazione
| LINEARIZZAZIONE | |
Se la meccanica non è lineare, in questa pagina è possible inserire una tabella di linearizzazione tra la posizione letta dal trasduttore (reale) e la posizione linearizzata.
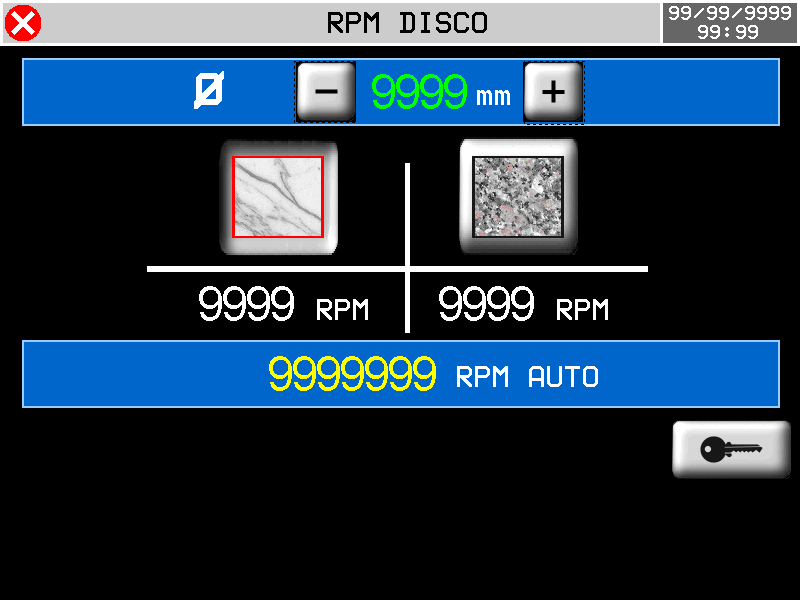
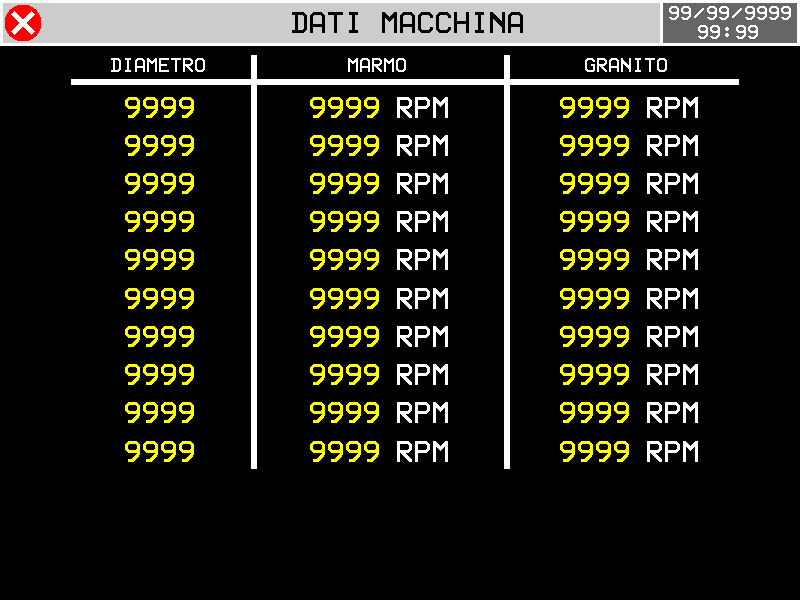
6. Tabella RPM disco
MAIN MENU  |  |
|
 |  |
|
 password 462 |
||
 |
||