This is an old revision of the document!
AN008 - Example of using and calibrating the JOINT device
JOINT can be considered a device that combines the functionality of three EANPOS device to control respectively three axes that are called X, Y and Z. Therefore placements are made using a control of P.I.D. type as for the EANPOS device.
The novelty item than the simple single-axis positioner is the ability to make interpolated movements: by this we mean draw arcs precisely to join such as two line segments.
In this section we want to describe the first steps that will make the userin its first approach to the device. You also want to provide a simple example using the JOINT device so that the user has a starting point from which to develop your application.
We can divide in the following sections, the proceed of the operation:
-
device declaration in the configuration unit
-
introduction of parameters in order to correctly calibrate inputs and outputs
-
development of the application according to the needs
Device declaration in the configuration unit
As was already explained in the description of the JOINT device,You must program properly the unit application configuration. It is very important to the part of code that declares the device, here you should indicate the hardware resources to use to ensure proper operation. It will be the responsibility of the programmer to pick and choose the most appropriate inputs and outputs.For example with the following line of code:
;---------------------------------
; Internal device declaration
;---------------------------------
INTDEVICE
..
<Axis> JOINT 0002 3 20000
1.CNT01 1 1.INP01 1.AN01
1.CNT02 2 1.INP02 1.AN02
2.CNT01 3 2.INP01 2.AN01
3.OUT01 3.OUT02 3.OUT03 3.OUT04
You define a JOINT device with name “Asse” were the sampling time is 2 ms. Later he introduced the number of axes that you want to control (3 in this case) and the size of the internal buffer that you use to make the calculations of the interpolation.
This is followed by three rows that are inserted the configuration parameters of the axes (respectively X, Y and Z) as should be done for an EANPOS device. There are: the hardware address of bi-directional meter for the acquisition of the position, the digital address for interruption and a digital address for enable to be used in the homing procedure and finally the address of the analog output for control of the drive connected to the motor you intend to move. This configuration is repeated for the remaining two axes (if you are using 3, otherwise you use currency symbol X or X.Xas usual if you do not use any resource).
Finally you have the ability to declare 4 digital outputs that you can use with this device.
An application that has just inside the device Declaration in the configuration unit and a qcl unit that it does not run anything (excluding the forced WAIT) already allows to perform the first operations using the capabilities of the device. In fact after downloading the application tool and have done work, It can change the parameters,observe the States or give commands to devices using the appropriate monitor from QView.
This is very convenient in the early stages of planning When you just want to make some runs or debugged phase.
Correct device parameterization
 | Note: In this document the various parameters and commands refer to a generic axis, so you have to remember to use parameters and commands related to the axis that you want to control |
|---|
Once declared hardware resources properly to use you need to set some parameters depending on the components that are attached to the Qmove product to properly configure each axis. The operations will be repeated for the three axes. The parameters taken from the EANPOS device have the same name with postponed a letter indicating the axis you are configuring.
Measure and pulse introduction
Let us consider the case the bi-directional transducer is a digital encoder. Suppose that the encoder is directly keyed on an engine that is to move an axis. You will need to set the correctly the measure and pulse parameters so that the latter can interpret the pulses arriving at QMove, the tool will then calculate the position of the axis. The measure and pulse introduction establishes a correspondence between a space in a unit of your choice and a certain number of pulses. In the event that the user already knows the space covered in a round encoder then you'll proceed directly to projecting values.
Let's clarify this concept with an example: If the encoder emits 1000 pulses/Rev and you know that the axis moves about 5 cm when the encoder execute exactly one round then you can insert the following values:
Axis:measurex = 50; Axis:pulsex = 4000
The measure value introduced it also involves choosing a unit of measure of mm for measuring positions, in the pulse parameter introduces a value equal to the number of encoder impulses multiplied by 4 (the number of fronts generated by the encoder). It is remember that the measure/pulse relationship must be have a value between 0.00935 and 1. It is important to emphasize that the values described above are taken as reference: It is not necessary to introduce the parameters taking as reference a encoder turn as we will describe below.
When the user does not know in advance the measurement parameters, will still be able to make the correct calibration by following these steps:
-
give the command to INIT at device, verify that the st_init status switch to 1
-
through the “monitor device” of QView see on the pc the value of posit parameter
-
sets measure and pulse both to 1 value
-
move the axis manually having him make a move a position easily measurable
-
read the posit value
-
now insert the desired measurement unit the measured value in the measure parameter and the value of the posit parameter in the pulse parameter
The encoder resolution is now correctly set.
A further important operation is set the maxpos and minpos parameters that define respectively the maximum and the minimum position accessible from an axis.
Choice of speed unit measure
The instantaneous speed unit measure of the axis is choice by unitvel and decpt parameters. You can select the unit of time of speed with the unitvel parameter: If this is equal to 0 then the speed is measured in Um/min, if it is equal to 1 then is measured in Um/s. The decpt parameter instead determines whether multiple speed-measuring of the basic measure unit Um. For example, if hte basic measure unit Um=mm, and unitvel=1 you get the speed indicator in the vel variable in:
mm/s (with decpt = 0),
cm/s (with decpt = 1),
dm/s (with decpt = 2),
m/s (with decpt = 3).
Then you need to set the proper display on the terminal operator to adjust the correct decimal point position.
Analogue output calibration
 | Attention: Before executing actual placements verify the connections and mechanic parts. |
|---|
We review the case that your device uses an analogue output implemented with a DAC system: this will assume 16 bit resolution input discrete values (so between -32768 and 32767) to give analog voltage output range ±10V. With the calibration function this analog output can be controlled with a constant value in order to test links and functionality.
Movimentazione preliminare
In questa sezione vengono descritte le operazioni da effettuare per verificare la correttezza dei collegamenti e la funzionalità del sistema che è stato costruito.
-
dare il comando di INIT al device, verificare che lo stato st_init commuti a 1
-
dare il comando RESUME per togliere un'eventuale condizione di emergenza (st_emrg = 1)
-
abilitare lo stato di calibrazione asse dando il comando CALON, lo stato st_cal commuta a 1
-
in queste condizioni è possibile impostare la tensione analogica tramite il parametro vout: il valore è espresso in decimi di Volt (perciò il range di valori introducibili è ±100). Si consiglia di introdurre valori bassi (5, 10, 15 …)
-
poiché ora il device è utilizzato come “generatore di tensione” l'asse dovrebbe iniziare a muoversi. Se ciò non accade è opportuno verificare la correttezza dei collegamenti. Quando l'asse è in movimento il parametro frq indica il valore della frequenza di uno dei segnali in ingresso al contatore bidirezionale, vel indica la velocità dell'asse mentre posit la posizione secondo l'unità di misura scelta. Se dando tensione positiva la posizione decrementa è necessario invertire le fasi del trasduttore (o fisicamente spostando i cavi, oppure tramite il comando CNTREV) o invertire la direzione dell'azionamento
-
se con tensione di uscita pari a 0 V si nota comunque che l'asse è in movimento a causa di tensioni di offset, queste si possono controbilanciare agendo sul parametro offset. Per un ottimale esito della taratura, l'operazione deve essere eseguita con il sistema in regime di temperatura
-
ora è possibile disabilitare lo stato di calibrazione con il comando CALOFF (lo stato st_cal commuta a 0).
Parametrizzazione uscita analogica (impostazione parametro maxvel)
Il device genera il valore di tensione dell'uscita analogica sulla base di una proporzione tra la velocità massima dell'asse e la massima tensione di uscita. Per fare ciò è necessario impostare il parametro maxvel, ovvero la velocità con cui si muove l'asse quando viene data tensione massima all'azionamento. Ovviamente l'asse deve avere un comportamento simmetrico rispetto al valore zero di tensione analogica, quindi la velocità deve essere la stessa (in modulo) alla tensione massima sia positiva che negativa.
Per conoscere la velocità massima esistono due vie: il “metodo teorico” presuppone di conosce la velocità massima del motore (giri massimi dichiarati) da cui si può ricavare facilmente la velocità lineare.
Se non si è a conoscenza della velocità massima dichiarata del motore si deve procedere in questo modo:
-
entrare nella modalità di calibrazione (come descritto precedentemente)
-
se il sistema lo permette fornire all'azionamento tensione massima e leggere il valore del parametro vel
-
è possibile anche fornire una tensione minore e calcolare la velocità massima con la proporzione vout : 10 V = vel : maxvel
Ora è quindi possibile introdurre il valore della velocità massima nel parametro maxvel.
Prima movimentazione
Attenzione:
Prima di movimentare l'asse, verificare il corretto funzionamento dei dispositivi d'emergenza e protezione.
Le procedure fin qui descritte hanno permesso di completare la prima fase di parametrizzazione del device. Ora è possibile eseguire una semplice movimentazione dell'asse. Seguire ad esempio i seguenti passi:
-
dare il comando di INIT al device, verificare che lo stato st_init commuti a 1
-
spostare l'asse in una posizione tale per cui si possa compiere un determinato spazio senza incontrare finecorsa
-
impostare il parametro che definisce il tempo impiegato dall'asse a raggiungere la velocità massima da 0 (e viceversa) taccdec=50
-
impostare la velocità di posizionamento con il parametro setvel
-
impostare la quota di posizionamento con il parametro setpos
-
impostare il parametro feedfw a 1000 (100%)
-
resettare l'eventuale stato di emergenza con il comando RESUME
-
avviare il posizionamento con il comando START, per arrestare il movimento dare il comando STOP (oppure EMRG).
Questa prima movimentazione è stata eseguita senza attivare l'anello di reazione di spazio, quindi qualsiasi errore introdotto da valori di tensione di offset o da agenti esterni non viene corretto.
Utilizzo del device RECDATA per calibrare correttamente il controllore PID
Quando il programmatore intende regolare finemente i parametri del regolatore PID, egli può servirsi di un device interno (residente sul QMove) che permette di registrare dati del tipo: posizione in impulsi primari, posizioni virtuali asse, uscite analogiche, errori di inseguimento, stati di ingressi e uscite. Questo tool si chiama RECDATA e sfrutta la RAM della CPU del prodotto QMove, perciò, quando viene impiegato, l'utilizzo della memoria dei dati non deve superare il 50% di quella totale.
Poiché gli effetti della regolazione PID producono manifestazioni molto difficili da apprezzare ad occhio nudo, il device RECDATA diventa molto utile quando si vogliono tarare parametri quali pgain, integt o derivt. Infatti fenomeni come l'overshoot o un rallentamento dovuto ad un valore eccessivo del tempo integrale devono essere tenuti in considerazione nella fase di parametrizzazione.
L'utilizzo di un device RECDATA risulta molto semplice, è sufficiente infatti che esso sia dichiarato correttamente nella unit di configurazione con una riga del tipo:
;--------------------------------- ; Dichiarazione device interni ;--------------------------------- INTDEVICE Recorder RECDATA TCamp QCTL1 QCTL2 IOutA1 IOutA2 IntL1 IntL2 Ing1 Ing2 Out1 Out2
il device è particolarmente indicato a monitorare i parametri del device infatti consente di visualizzare: i valori di posizione in impulsi primari (prendendo direttamente i dati provenienti dal trasduttore bidirezionale), i valori di posizione teorica che il generatore di profilo di velocità sta generando, i valori di una uscita analogica. L'utente può quindi comodamente accorgersi se i parametri che ha inserito sono corretti per le sue esigenze.
Una descrizione più approfondita del device RECDATA si può trovare nella sezione apposita, qui ci limitiamo ad elencare i passi da seguire per utilizzarlo:
-
dichiarazione del device nella unit di configurazione inserendo come parametri ingressi ed uscite utilizzati anche dal device JOINT
-
dare il comando STARTR nel momento in cui si vuole iniziare la registrazione, e STOPR quando la si vuole arrestare
-
ad operazioni completate dal menu “Monitor” di QView selezionare “Device Panels”, e da lì il valore relativo al device RECDATA
-
nella finestra che si aprirà sono disponibili diverse opzioni, l'operazione più importante da compiere è dare il comando “Start data acquiring” tramite l'apposito icona
-
sugli assi cartesiani, a fine caricamento, compariranno i valori dei parametri che sono stati monitorati
Nota:
Il device RECDATA registra una notevole quantità di dati all'interno della RAM del prodotto QMove, al momento dell'acquisizione da parte del pc il trasferimento avviene via seriale. Questa operazione potrebbe risultare molto lunga a causa della bassa velocità intrinseca del protocollo di comunicazione seriale. L'utente quindi può adottare alcuni accorgimenti come:
-
prestare attenzione a registrare solo le variabili che necessitano effettivamente di essere monitorate
-
abbassare il tempo di campionamento del device RECDATA.
Sviluppo di un applicativo per effettuare un posizionamento in interpolazione
Nella sezione precedente è stato spiegato quali sono i primi passi da seguire. Tale esempio impiega solo un ristretto spettro dei parametri impostabili del device, in questa sezione inseriamo un codice di esempio, dettagliatamente commentato, da cui l'utilizzatore può prendere spunto per sviluppare un applicativo.
Il modo in cui il device va dichiarato è spiegato precedentemente, e perciò in questa sezione è omessa la unit di configurazione. Vedi qui.
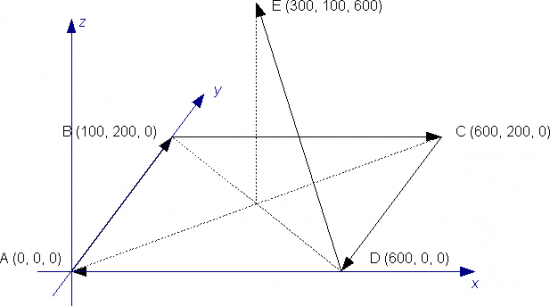
Supponiamo di dovere effettuare dei posizionamenti con interpolazione di tre assi secondo il percorso indicato in figura, analizziamo quale potrebbe essere il codice del programma.
;*************************************************************************************
; Unit di configurazione (sono riportate solo le dichiarazioni di variabili e
; sono omesse le dichiarazioni del bus e del device)
;*************************************************************************************
;---------------------------------------------
; Definizione Array GLOBAL
;---------------------------------------------
ARRGBL
awPosX W 5 ;quote di posizionamento asseX
awPosY W 5 ;quote di posizionamento asseY
awPosZ W 5 ;quote di posizionamento asseZ
awCodeSt W 5 ;codici passo in interpolazione
;-------------------------------------------------------------------------------------
; Definizione Variabili SYSTEM
;-------------------------------------------------------------------------------------
SYSTEM
;-------------------------------------------------------------------------------------
; Definizione Variabili GLOBAL
;-------------------------------------------------------------------------------------
GLOBAL
gbi B
;-------------------------------------------------------------------------------------
; Definizione Variabili INPUT
;-------------------------------------------------------------------------------------
INPUT
ifStart F 1.INP01
;-------------------------------------------------------------------------------------
; Definizione Variabili OUTPUT
;-------------------------------------------------------------------------------------
OUTPUT
;*************************************************************************************
; Unit qcl
;*************************************************************************************
;************************
; parametrizzazione assi
;************************
;****AsseX****
Asse:measurex = 10000
Asse:pulsex = 40000 ;come calcolare measure e pulse è spiegato nel paragrafo apposito.*
Asse:maxvelx = 100000 ;come calcolare maxvel è spiegato nel paragrafo apposito.*
Asse:mxrlvelx = 15000 ;velocità massima raggiungibile in interpolazione
Asse:maxposx = 1000 ;Quota massima
Asse:minposx = -100 ;Quota minima
Asse:maxfollerrx = 10000 ;Errore di inseguimento massimo
Asse:unitvelx = 0 ;Unità di tempo della velocità (velocità in Um/min)
Asse:decptx = 0 ;Cifre decimali nel calcolo della velocità
Asse:rampmodex = 0 ;Tipo di rampe utilizzate (in questo caso stesso tempo di accelerazione
;o decelerazione da velocità zero a velocità massima)
Asse:taccdecx = 100 ;Tempo di accelerazione e di decelerazione (durante movimenti non interpolati)
Asse:tinvx = 0 ;Tempo di inversione asse
Asse:tollx = 5 ;Tolleranza (impostata in Um)
Asse:toldlyx = 10 ;Tempo di ritardo attivazione stato di tolleranza
Asse:offsetx = 0 ;Tensione di offset
Asse:pgainx = 10 ;Guadagno proporzionale
Asse:feedfwx = 1000 ;Feedforward
Asse:integtx = 0 ;Tempo integrale
Asse:derivtx = 0 ;Tempo derivativo
;****AsseY****
Asse:measurey = 10000
Asse:pulsey = 40000 ;come calcolare measure e pulse è spiegato nel paragrafo apposito.*
Asse:maxvely = 100000 ;come calcolare maxvel è spiegato nel paragrafo apposito.*
Asse:mxrlvely = 15000 ;velocità massima raggiungibile in interpolazione
Asse:maxposy = 1000 ;Quota massima
Asse:minposy = -100 ;Quota minima
Asse:maxfollerry = 10000 ;Errore di inseguimento massimo
Asse:unitvely = 0 ;Unità di tempo della velocità (velocità in Um/min)
Asse:decpty = 0 ;Cifre decimali nel calcolo della velocità
Asse:rampmodey = 0 ;Tipo di rampe utilizzate (in questo caso stesso tempo di accelerazione
;o decelerazione da velocità zero a velocità massima)
Asse:taccdecy = 100 ;Tempo di accelerazione e di decelerazione (durante movimenti non interpolati)
Asse:tinvy = 0 ;Tempo di inversione asse
Asse:tolly = 5 ;Tolleranza (impostata in Um)
Asse:toldlyy = 10 ;Tempo di ritardo attivazione stato di tolleranza
Asse:offsety = 0 ;Tensione di offset
Asse:pgainy = 10 ;Guadagno proporzionale
Asse:feedfwy = 1000 ;Feedforward
Asse:integty = 0 ;Tempo integrale
Asse:derivty = 0 ;Tempo derivativo
;****AsseZ****
Asse:measurez = 10000
Asse:pulsez = 40000 ;come calcolare measure e pulse è spiegato nel paragrafo apposito.*
Asse:maxvelz = 100000 ;come calcolare maxvel è spiegato nel paragrafo apposito.*
Asse:mxrlvelz = 15000 ;velocità massima raggiungibile in interpolazione
Asse:maxposz = 1000 ;Quota massima
Asse:minposz = -100 ;Quota minima
Asse:maxfollerrz = 10000 ;Errore di inseguimento massimo
Asse:unitvelz = 0 ;Unità di tempo della velocità (velocità in Um/min)
Asse:decptz = 0 ;Cifre decimali nel calcolo della velocità
Asse:rampmodez = 0 ;Tipo di rampe utilizzate (in questo caso stesso tempo di accelerazione
;o decelerazione da velocità zero a velocità massima)
Asse:taccdecz = 100 ;Tempo di accelerazione e di decelerazione (durante movimenti non interpolati)
Asse:tinvz = 0 ;Tempo di inversione asse
Asse:tollz = 5 ;Tolleranza (impostata in Um)
Asse:toldlyz = 10 ;Tempo di ritardo attivazione stato di tolleranza
Asse:offsetz = 0 ;Tensione di offset
Asse:pgainz = 10 ;Guadagno proporzionale
Asse:feedfwz = 1000 ;Feedforward
Asse:integtz = 0 ;Tempo integrale
Asse:derivtz = 0 ;Tempo derivativo
;****Parametri device****
Asse:setveli = 10000 ;Velocità in interpolazione
Asse:maxveli = 15000 ;Velocità massima in interpolazione
Asse:tacci = 100 ;Tempo di accelerazione di interpolazione
Asse:prgmode = 0 ;impostazione delle quote come assolute
;****Inizializzazione del device****
INIT Asse ;Inizializza il device
WAIT Asse:st_init ;Attendi che il device sia inizializzato
CNTUNLOCKX Asse ;Sblocca acquisizione posizione asse X
WAIT NOT Asse:st_cntlockx ;Attendi che l'acquisizione della posizione sia sbloccato
CNTUNLOCKY Asse ;Sblocca acquisizione posizione asse Y
WAIT NOT Asse:st_cntlocky ;Attendi che l'acquisizione della posizione sia sbloccato
CNTUNLOCKZ Asse ;Sblocca acquisizione posizione asse Z
WAIT NOT Asse:st_cntlockz ;Attendi che l'acquisizione della posizione sia sbloccato
CNTDIRX Asse ;Imposta il senso dell'acquisizione di posizione asse X
WAIT NOT Asse:st_cntrevx ;Attendi che sia impostato il senso dell'acquisizione di posizione
CNTDIRY Asse ;Imposta il senso dell'acquisizione di posizione asse Y
WAIT NOT Asse:st_cntrevy ;Attendi che sia impostato il senso dell'acquisizione di posizione
CNTDIRZ Asse ;Imposta il senso dell'acquisizione di posizione asse Z
WAIT NOT Asse:st_cntrevz ;Attendi che sia impostato il senso dell'acquisizione di posizione
REGONX Asse ;Abilita la regolazione asse X
WAIT NOT Asse:st_regoffx ;Attendi l'abilitazione alla regolazione
REGONY Asse ;Abilita la regolazione asse Y
WAIT NOT Asse:st_regoffx ;Attendi l'abilitazione alla regolazione
REGONZ Asse ;Abilita la regolazione asse Z
WAIT NOT Asse:st_regoffx ;Attendi l'abilitazione alla regolazione
RESUMEX Asse ;Togli l'asse x da eventuale stato di emergenza
WAIT NOT Asse:st_emrgx ;Attendi che l'asse non sia in emergenza
RESUMEY Asse ;Togli l'asse y da eventuale stato di emergenza
WAIT NOT Asse:st_emrgx ;Attendi che l'asse non sia in emergenza
RESUMEZ Asse ;Togli l'asse z da eventuale stato di emergenza
WAIT NOT Asse:st_emrgx ;Attendi che l'asse non sia in emergenza
LOOPONX Asse ;Aggancia loop di reazione dell'asse x
WAIT Asse:st_looponx ;Attendi che sia agganciato il loop di reazione dell'asse
LOOPONY Asse ;Aggancia loop di reazione dell'asse y
WAIT Asse:st_looponx ;Attendi che sia agganciato il loop di reazione dell'asse
LOOPONZ Asse ;Aggancia loop di reazione dell'asse z
WAIT Asse:st_looponx ;Attendi che sia agganciato il loop di reazione dell'asse
;***********************************************
; impostazione del programma di posizionamenti
;***********************************************
;coordinate asse X
awPosX[1] = 0
awPosX[2] = 100
awPosX[3] = 600
awPosX[4] = 500
awPosX[5] = 300
;coordinate asse Y
awPosY[1] = 0
awPosY[2] = 200
awPosY[3] = 200
awPosY[4] = 0
awPosY[5] = 100
;coordinate asse Z
awPosZ[1] = 0
awPosZ[2] = 0
awPosZ[3] = 0
awPosZ[4] = 0
awPosZ[5] = 600
;codici passo in intepolazione
awCodeSt[1] = 0
awCodeSt[1] = 0
awCodeSt[1] = 0
awCodeSt[1] = 3000 ;attesa di 1 secondo dopo il 4 posizionamento
awCodeSt[1] = 10001 ;accensione dell'uscita 1 al termine dell'ultimo posizionamento
;*************************************
; scrittura dei passi nel programma
;*************************************
Asse:stepnum = 1 ;memorizzo una coordinata alla volta
FOR (gbi=1, gbi LE 5, 1)
Asse:stepin = gbi
Asse:codex1 = awPosX[gbi] ;coordinata asse X
Asse:codey1 = awPosY[gbi] ;coordinata asse Y
Asse:codez1 = awPosZ[gbi] ;coordinata asse Z
Asse:codestp1 = awCodeSt[gbi] ;codice passo in interpolazione
Asse:stepout = 0
WRITESTEP Asse
WAIT Asse:stepout EQ Asse:stepin
NEXT
;ora è completa la tabella del programma dei posizionamenti
Asse:stepbeg = 1 ;passo di inizio programma
Asse:stepend = 5 ;passo di fine programma
Asse:setveli = 8000 ;velocità di interpolazione
MAIN:
IF ifStart ;se do il comando di start da ingresso digitale
STARTPRG Asse
ENDIF
Come calcolare measure e pulse è spiegato nel paragrafo apposito.
Per effettuare dei posizionamenti semplici le operazioni da svolgere sono le stesse che sono state analizzate nella descrizione del device EANPOS.