This is an old revision of the document!
AN001- Example of using and calibrating the CAMMING3 device
In this section we want to describe the first steps that will make the user in his first contact with the CAMMING device. Also you will describe some usage examples of the device.
We can divide in the following sections, the proceed of the operation:
-
device declaration in the configuration unit
-
introduction of parameters in order to correctly calibrate inputs and outputs
-
development of the application according to the needs
Device declaration in the configuration in unit
As was already explained in the description of the CAMMING device, you must program properly the unit application configuration. It is very important to the piece of code that declares the device, here you should indicate the hardware resources to be used to ensure proper operation. It will be the responsibility of the programmer to pick and choose the most appropriate inputs and outputs. For example with the following line of code:
;--------------------------------- ; Internal devices declaration ;--------------------------------- INTDEVICE device_name CAMMING3 TCamp CountS CountMA CountMB IntL IAZero IntLM IAZeroM InG InGInt IoutA Out Axis CAMMING3 2 2.CNT01 2.CNT02 1.CNT01 1 2.INP01 2 2.INP02 2.INP03 5 2.AN01 2.OUT01
You define a CAMMING3 device with “Axis” name where the sampling time is 2 ms. The following are declared all hardware resources necessary for the use of the device, the detailed description is listed in the documentation for your device.
An application that has just inside the device Declaration in configuration unit and a qcl unit that it does not run anything (unless forced to WAIT) already allows to perform the first operations using the capabilities of the device. In fact after downloading the application tool and have done turn, will can change the parameters, observe the States or give commands to devices using the appropriate monitor from QView.
This is very convenient in the early stages of planning when you just want to make some runs or being debugged.
Correct device parameterization
Once declared hardware resources properly to use you need to set some parameters as components that are connected to the Qmove product.
Measure and pulse introduction
Consider the case where the transducer is a bi-directional digital encoder. Suppose that the encoder is directly keyed on an engine that should move the slave axis. You will need to set correctly the measure and pulse the parameters of the device so that it can interpret the pulses arriving at QMove, the instrument will then calculate the position of the axis. The measure and pulse introduction establishes a correspondence between a space in a unit of your choice and a certain number of pulses. In the event that the user already knows the space covered in a round encoder then you'll proceed directly to insert the values.
Example: If the encoder emits 1000 pulses/Rev and you know that the axis moves about 5 cm When the encoder performs exactly one lap then you can insert the following values:
AsseX:measure = 50; AsseX:pulse = 4000
The measure value introduced involves choosing a unit of measure of mm for measuring positions, in the pulse parameter it was introduced a value equal to the number of encoder impulses multiplied by 4. It is remember that the measure/pulse relationship must be a value between 0.00935 and 1 (for compliance with the limits of accuracy of the device and the product QMove). It's important to remember that the values described above are taken as reference: it's not necessary to introduce the parameters with reference to an encoder revolution as we will describe below.
When the user does not know the measurement parameters, will still be able to make the correct calibration by following these steps:
-
give the INIT command to the device, verify that the st_init status switch to 1
-
through the “device monitor” of QView displayed on pc the parameter posit value
-
set measure and pulse both to the value 1
-
move the axis manually by having him make a move a position easily measurable
-
read the posit value
-
insert the desired measurement unit the measured value in the measure parameter and the value of the posit parameter in the pulse parameter.
The encoder resolution is now correctly set.
Another important step to take is to set the maxpos and minpos parameters that define respectively the maximum and the minimum position accessible from axis.
 | Nota: È necessario effettuare questa procedura due volte in modo da tarare correttamente sia l'asse master che l'asse slave |
|---|
Scelta dell'unità di misura della velocità
Il device CAMMING consente di misurare la sola velocità dell'asse slave. L'unità di misura della velocità istantanea dell'asse viene scelta tramite i parametri unitvel e decpt. È possibile scegliere l'unità di tempo della velocità con il parametro unitvel: se questo è pari a 0 allora la velocità è misurata in Um/min, se è pari a 1 allora è misurata in Um/s. Il parametro decpt invece stabilisce se misurare i valori di velocità in multipli dell'unità di misura fondamentale Um. Ad esempio, se l'unità di misura fondamentale Um=mm, ed unitvel=1 si ottiene la visualizzazione della velocità nella variabile vel in:
mm/s (con decpt = 0),
cm/s (con decpt = 1),
dm/s (con decpt = 2),
m/s (con decpt = 3).
In seguito, se necessario, bisognerà configurare correttamente la visualizzazione sul terminale operatore per aggiustare la corretta posizione del punto decimale.
Calibrazione uscita analogica
Attenzione:
prima di effettuare dei posizionamenti veri e propri è necessario verificare che collegamenti ed organi meccanici non siano causa di malfunzionamenti.
Esaminiamo il caso in cui il device CAMMING utilizzi un'uscita analogica implementata con un dispositivo DAC per comandare l'asse slave: questo assumerà in ingresso valori discreti con risoluzione 16 bit (perciò compresi fra -32768 e 32767) per dare in uscita una tensione analogica con range ±10V. Con la funzione di calibrazione questa uscita analogica può essere pilotata con un valore costante con lo scopo di verificare collegamenti e funzionalità.
Movimentazione preliminare
In questa sezione vengono descritte le operazioni da effettuare per verificare la correttezza dei collegamenti e la funzionalità del sistema che è stato costruito.
-
dare il comando di INIT al device, verificare che lo stato st_init commuti a 1
-
dare il comando RESUME per togliere un'eventuale condizione di emergenza (st_emrg = 1)
-
abilitare lo stato di calibrazione asse dando il comando CALON, lo stato st_cal commuta a 1
-
in queste condizioni è possibile impostare la tensione analogica tramite il parametro vout: il valore è espresso in decimi di Volt (perciò il range di valori introducibili è ±100). Si consiglia di introdurre valori bassi (5, 10, 15 …)
-
poiché ora il device è utilizzato come “generatore di tensione” l'asse dovrebbe iniziare a muoversi. Se ciò non accade è opportuno verificare la correttezza dei collegamenti. Quando l'asse è in movimento il parametro frq indica il valore della frequenza di uno dei segnali in ingresso al contatore bidirezionale, vel indica la velocità dell'asse mentre posit la posizione secondo l'unità di misura scelta. Se dando tensione positiva la posizione decrementa è necessario invertire le fasi del trasduttore (o fisicamente spostando i cavi, oppure tramite il comando CNTREV) o invertire la direzione dell'azionamento
-
se con tensione di uscita pari a 0 V si nota comunque che l'asse è in movimento a causa di tensioni di offset, queste si possono controbilanciare agendo sul parametro offset. Per un ottimale esito della taratura, l'operazione deve essere eseguita con il sistema in regime di temperatura
-
ora è possibile disabilitare lo stato di calibrazione con il comando CALOFF (lo stato st_cal commuta a 0)
Parametrizzazione uscita analogica (impostazione parametro maxvel)
Il device EANPOS genera il valore di tensione dell'uscita analogica sulla base di una proporzione tra la velocità massima dell'asse e la massima tensione di uscita. Per fare ciò è necessario impostare il parametro maxvel, ovvero la velocità con cui si muove l'asse quando viene data tensione massima all'azionamento. Ovviamente l'asse deve avere un comportamento simmetrico rispetto al valore zero di tensione analogica, quindi la velocità deve essere la stessa (in modulo) alla tensione massima sia positiva che negativa.
Per conoscere la velocità massima esistono due vie: il “metodo teorico” presuppone di conosce la velocità massima del motore (giri massimi dichiarati) da cui si può ricavare facilmente la velocità lineare.
Se non si è a conoscenza della velocità massima dichiarata del motore si deve procedere in questo modo:
-
entrare nella modalità di calibrazione (come descritto precedentemente)
-
se il sistema lo permette fornire all'azionamento tensione massima e leggere il valore del parametro vel
-
è possibile anche fornire una tensione minore e calcolare la velocità massima con la proporzione vout : 10 V = vel : maxvel
Ora è quindi possibile introdurre il valore della velocità massima nel parametro maxvel.
Prima movimentazione
Attenzione:
prima di movimentare l'asse, verificare il corretto funzionamento dei dispositivi d'emergenza e protezione.
Le procedure fin qui descritte hanno permesso di completare la prima fase di parametrizzazione del device. Ora è possibile eseguire una semplice movimentazione dell'asse. Seguire ad esempio i seguenti passi:
-
dare il comando di INIT al device, verificare che lo stato st_init commuti a 1
-
spostare l'asse in una posizione tale per cui si possa compiere un determinato spazio senza incontrare finecorsa
-
impostare i parametri tacc e tdec
-
impostare la velocità di posizionamento con il parametro setvel
-
impostare la quota di posizionamento con il parametro setpos
-
impostare il parametro feedfw a 1000 (100%)
-
resettare l'eventuale stato di emergenza con il comando RESUME
-
avviare il posizionamento con il comando START, per arrestare il movimento dare il comando STOP (oppure EMRG).
Questa prima movimentazione è stata eseguita senza attivare l'anello di reazione di spazio, quindi qualsiasi errore introdotto da valori di tensione di offset o da agenti esterni non viene corretto.
Esempi di compilazione della cam table
Camma per spandifilo
Consideriamo ad esempio un'applicazione per spandifilo, i passi che dovrà seguire l'asse slave sono:
-
partenza con rampa di accelerazione
-
raggiungimento di una velocità proporzionale a quella del master
-
mantenimento della velocità raggiunta per un percorso predeterminato
-
arresto con rampa di decelerazione
-
stop dell'asse per un certo spazio del master
-
ritorno al punto di partenza con le stesse modalità del tratto d'andata.
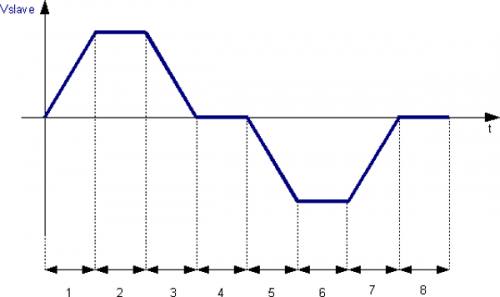
| Settore 1 | accelerazione con partenza da velocità nulla e arrivo a velocità preimpostata (codeG 131) con incremento positivo della posizione slave; è necessario calcolare correttamente il rapporto fra le quote master e slave perché la velocità di uscita sia corretta |
| Settore 2 | tratto a velocità costante (codeG 133) con incremento positivo della posizione slave |
| Settore 3 | decelerazione con velocità finale 0 (codeG 135) con incremento positivo della posizione slave |
| Settore 4 | arresto dell'asse slave (codeG 133): si programma la quota master come desiderata mentre si lascia nulla quella slave |
| Settore 5 | accelerazione con partenza da velocità nulla e arrivo a velocità preimpostata (codeG 131) con decremento della posizione slave; è necessario calcolare correttamente il rapporto fra le quote master e slave perché la velocità di uscita sia corretta (è possibile utilizzare gli stessi valori del settore 1 con quota slave negativa) |
| Settore 6 | tratto a velocità costante (codeG 133) con decremento della posizione slave |
| Settore 7 | decelerazione con velocità finale 0 (codeG 135) con decremento della posizione slave |
| Settore 8 | arresto dell'asse slave (codeG 133): si programma la quota master come desiderata mentre si lascia nulla quella slave |
Dopo l'esecuzione del settore 8 si potranno eseguire delle funzioni che eseguono il ri-fasamento delle posizioni master e slave in impulsi primari sottraendo lo spazio percorso fino a fine settore; in seguito sarà possibile ri-eseguire automaticamente le camma.
Camma per taglio al volo con extravelocità
Consideriamo ad esempio un'applicazione per un semplice taglio al volo, i passi che dovrà seguire l'asse slave sono:
-
partenza dell'asse slave con rampa di accelerazione
-
raggiungimento della velocità dell'asse master
-
mantenimento della velocità raggiunta per la durata dell'operazione di taglio
-
concluso il taglio l'asse slave deve accelerare per portarsì ad una velocità maggiore e mantenerla per un certo spazio
-
arresto dell'asse slave con rampa di decelerazione
-
ritorno dell'asse slave al punto di partenza eseguendo rampe di accelerazione e decelerazione.
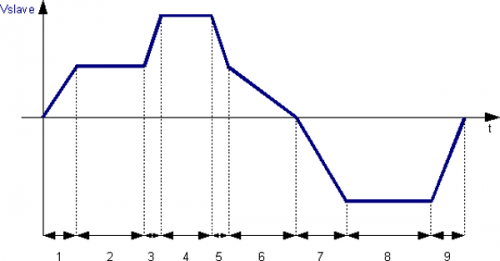
Settore 1: accelerazione con partenza da velocità nulla e arrivo alla stessa velocità del master (codeG 132) con incremento positivo della posizione slave. Settore 2: tratto intermedio a velocità costante (codeG 133) con incremento positivo della posizione slave. In questo settore master e slave percorreranno lo stesso spazio. Settore 3: accelerazione e incremento positivo della posizione dell'asse slave. Il settore impostato non è di accelerazione (codeG 133), per fare accelerare lo slave si dovrà impostare uno spazio maggiore rispetto il master. Settore 4: tratto a velocità costante e incremento positivo della posizione slave (codeG 133). Settore 5: decelerazione con incremento positivo della posizione slave (codeG 133). Si riporta lo slave alla stessa velocità del master, perciò la quota dovrà essere calcolata correttamente. Settore 6: decelerazione con velocità finale 0 (codeG 135) con decremento della posizione slave. Settore 7: accelerazione con partenza da velocità nulla e arrivo a velocità preimpostata (codeG 131) con decremento della posizione slave. Settore 8: tratto a velocità costante (codeG 133) con decremento della posizione slave. Settore 9: decelerazione con velocità finale 0 (codeG 135) con decremento della posizione slave.
Dopo l'esecuzione del settore 9 si potranno eseguire delle funzioni che eseguono il ri-fasamento delle posizioni master e slave in impulsi primari sottraendo lo spazio percorso fino a fine settore; in seguito sarà possibile ri-eseguire automaticamente le camma.
Utilizzo di un master simulato
Come è stato spiegato nella descrizione del device CAMMING è possibile che l'asse master sia reale oppure simulata, una via per realizzare un master simulato è dichiarare per il device CAMMING un indirizzo di un trasduttore simulato utilizzando un device di posizionamento (ad esempio EANPOS) dichiarato con il contatore sullo slot 1 (normalmente riservato alla CPU del sistema) e tutte le altre risorse disabilitate.
;--------------------------------- ; Dichiarazione device interni ;--------------------------------- INTDEVICE ... <nome_device> EANPOS TCamp ICont IntL IAZero IOutA Master EANPOS 2 1.CNT01 X X.X X.X
Il device così configurato viene considerato come un master simulato, esso viene comandato come fosse un normale device tenendo presente che il loop di regolazione deve essere aperto e di conseguenza non serve parametrizzare il PID, è sufficiente impostare il feedforward a 100%.
Esempio di programmazione
Si vuole utilizzare il device EANPOs configurato nell'esempio appena descritto e si ipotizza che il master simulato debba continuare il suo movimento all'infinito.
;------------------------------------------------------------
; Gestione del master simulato
;------------------------------------------------------------
Master:measure = 1000 ;impostazioni parametri master
Master:pulse = 4000
Master:decpt = 0
Master:unitvel = 1
Master:maxvel = 1000
Master:taccdec = 100
Master:maxpos = 999999
Master:minpos = -999999
INIT Master ;inizializzazione master simulato
WAIT Master:st_init
LOOPOFF Master
WAIT NOT Master:st_loopon
RESUME Master
WAIT NOT Master:st_emrg
MAIN:
IF sf01 ;flag che da lo start al master
IF Master: st_still
Master:posit = 0
Master:setvel = 500
Master:setpos = 999999
START Master ;comando di START
ENDIF
IF Master:posit GE 500000 ;aggiorno la posizione per non causare
;un oveflow
Master:posit = 0
ENDIF
ELSE
IF NOT Master:st_still ;stop del master simulato
STOP Master
ENDIF
ENDIF
WAIT 1
JUMP MAIN
END